基于Matlab使用MPC实现车辆轨迹跟踪
基于Matlab使用MPC实现车辆轨迹跟踪…
在自动驾驶领域,车辆轨迹跟踪是一项核心任务。模型预测控制(MPC)因其能有效处理多约束系统且具备滚动优化特性,成为实现车辆轨迹跟踪的有力工具。今天就来聊聊如何基于Matlab利用MPC实现车辆轨迹跟踪。
MPC基本原理
MPC的核心在于预测模型、滚动优化和反馈校正。预测模型根据当前系统状态预测未来状态;滚动优化在每个采样时刻基于预测模型求解有限时域的优化问题;反馈校正则利用实际测量值修正预测值,使控制更加精准。
车辆运动学模型
在Matlab实现中,我们首先要定义车辆运动学模型。以自行车模型为例,其状态方程可表示为:
\[
\begin{align*}
\dot{x} &= v \cos(\theta) \\
\dot{y} &= v \sin(\theta) \\
\dot{\theta} &= \frac{v}{L} \tan(\delta) \\
\dot{v} &= a
\end{align*}
基于Matlab使用MPC实现车辆轨迹跟踪…
\]
其中,$(x, y)$ 是车辆位置,$\theta$ 是车辆航向角,$v$ 是车速,$L$ 是车辆轴距,$\delta$ 是前轮转向角,$a$ 是车辆加速度。在Matlab中,我们可以用函数来表示这个模型:
function dx = vehicle_kinematic_model(x, u, dt)
% x: 状态变量 [x; y; theta; v]
% u: 控制变量 [a; delta]
% dt: 采样时间间隔
L = 2.9; % 车辆轴距
dx = zeros(4, 1);
dx(1) = x(4) * cos(x(3));
dx(2) = x(4) * sin(x(3));
dx(3) = x(4) / L * tan(u(2));
dx(4) = u(1);
dx = dx * dt;
end这段代码接收当前状态 x 和控制输入 u,以及采样时间间隔 dt,按照上述运动学方程计算状态变量的变化量 dx。
MPC优化问题求解
MPC的优化问题通常是在预测时域内最小化跟踪误差和控制输入变化。目标函数可定义为:
\[
J = \sum{k=1}^{Np} ( \| \mathbf{x}{k|i} - \mathbf{x}{k|i}^r \|Q^2 + \| \mathbf{u}{k|i} - \mathbf{u}{k|i}^r \|R^2 ) + \| \mathbf{x}{Np|i} - \mathbf{x}{Np|i}^r \|_P^2
\]
其中,$Np$ 是预测时域,$\mathbf{x}{k|i}$ 是在第 $i$ 时刻预测的第 $k$ 步状态,$\mathbf{x}{k|i}^r$ 是参考状态,$\mathbf{u}{k|i}$ 是在第 $i$ 时刻预测的第 $k$ 步控制输入,$\mathbf{u}_{k|i}^r$ 是参考控制输入,$Q$、$R$、$P$ 是权重矩阵。
在Matlab中,我们可以使用 mpc 工具箱来求解这个优化问题。首先要定义系统模型:
% 定义系统状态空间模型
A = [0 0 0 1; 0 0 0 0; 0 0 0 0; 0 0 0 0];
B = [0 0; 0 0; 1/L 0; 0 1];
C = eye(4);
D = zeros(4, 2);
sys = ss(A, B, C, D);
% 定义MPC控制器
mpcobj = mpc(sys);
mpcobj.Np = 10; % 预测时域
mpcobj.Nc = 3; % 控制时域
mpcobj.Q = [100 0 0 0; 0 100 0 0; 0 0 10 0; 0 0 0 1];
mpcobj.R = [1 0; 0 1];
mpcobj.P = [100 0 0 0; 0 100 0 0; 0 0 10 0; 0 0 0 1];这段代码先定义了车辆运动学模型的状态空间形式 sys,然后基于此创建了MPC控制器对象 mpcobj,并设置了预测时域、控制时域以及权重矩阵等参数。
轨迹跟踪实现
接下来就是利用MPC实现轨迹跟踪。我们需要提供参考轨迹,在每个采样时刻求解MPC优化问题得到控制输入,并更新车辆状态。
% 初始化
x0 = [0; 0; 0; 1]; % 初始状态
N = 100; % 仿真步数
dt = 0.1; % 采样时间
x = zeros(4, N);
x(:, 1) = x0;
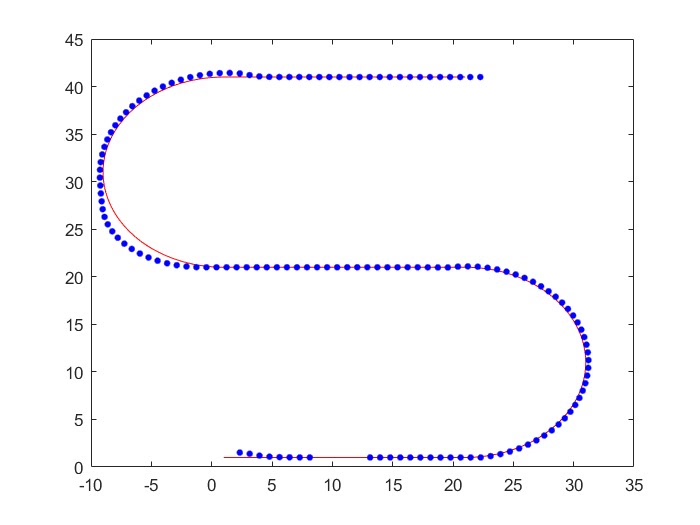
% 参考轨迹
xref = zeros(4, N);
xref(1, :) = linspace(0, 100, N);
xref(2, :) = sin(xref(1, :)/10);
xref(3, :) = atan(diff(xref(2, :))./ diff(xref(1, :)));
xref(3, end) = xref(3, end - 1);
xref(4, :) = ones(1, N);
for k = 1:N-1
% 当前状态
x_current = x(:, k);
% 参考状态
xref_current = xref(:, k);
% 求解MPC优化问题
[u, ~] = solve(mpcobj, x_current, xref_current);
% 更新车辆状态
dx = vehicle_kinematic_model(x_current, u, dt);
x(:, k + 1) = x_current + dx;
end这段代码首先初始化了车辆的初始状态和仿真参数,然后定义了一个简单的正弦曲线作为参考轨迹。在循环中,每一步根据当前状态和参考状态求解MPC得到控制输入 u,再利用车辆运动学模型更新车辆状态。
通过以上步骤,我们基于Matlab使用MPC实现了车辆轨迹跟踪。当然,实际应用中还需要考虑更多因素,如车辆动力学特性、传感器噪声等,但这里的基本框架为进一步深入研究提供了基础。希望这篇博文能对你在自动驾驶轨迹跟踪方面的研究有所帮助。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0



 已为社区贡献31条内容
已为社区贡献31条内容

所有评论(0)