搭建分布式车辆动力学模型:MATLAB/Simulink 的奇妙之旅
分布式车辆动力学模型,使用MATLAB/Simulink搭建,包括车辆纵向、侧向、横摆、侧倾、4个车轮旋转、前轮转向动力学模型及魔术轮胎模型。
嘿,各位技术宅们!今天来聊聊超有趣的分布式车辆动力学模型搭建,用的工具是 MATLAB/Simulink 这个神器哦。
整体模型框架
我们要搭建的这个模型,涵盖了车辆动力学的多个关键方面,包括纵向、侧向、横摆、侧倾,还有 4 个车轮旋转以及前轮转向动力学模型,另外还加入了魔术轮胎模型,让整个模型更贴近实际情况。
纵向动力学模型
纵向动力学主要关乎车辆的前后移动,也就是速度和加速度的变化啦。在 MATLAB/Simulink 里,我们可以用简单的公式来模拟。比如,根据牛顿第二定律$F = ma$,车辆纵向力$F_{long}$与加速度$a$的关系可以写成:
% 假设车辆质量 m
m = 1500;
% 纵向力 F_long
F_long = 5000;
% 计算加速度
a = F_long / m; 这里简单计算了车辆在给定纵向力下的加速度,实际模型中纵向力会根据发动机特性、传动系统等更复杂的因素来确定。
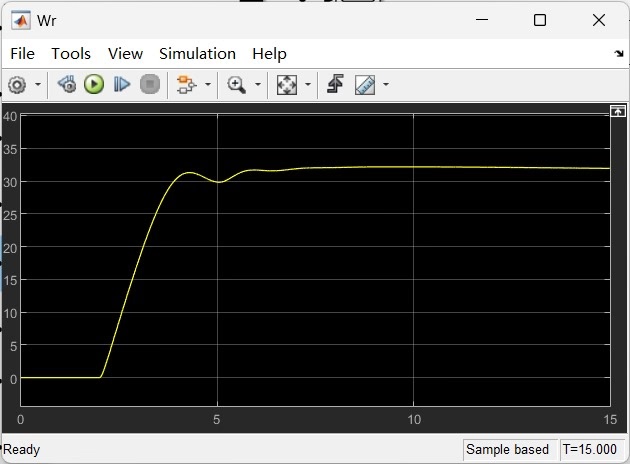
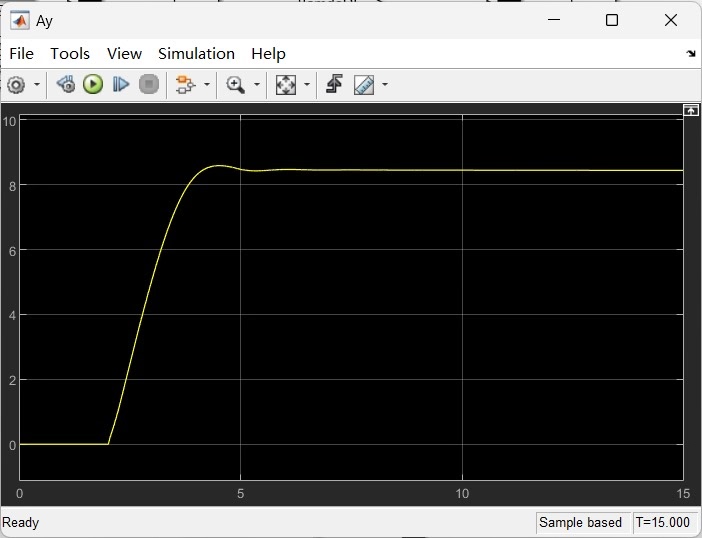
侧向与横摆动力学模型
侧向和横摆动力学紧密相连,它们影响着车辆的转向性能。以侧向力$F_{lat}$为例,我们可以通过车辆速度$v$、侧偏角$\alpha$等参数来计算。在 Simulink 里,可以搭建如下模块:
- 输入模块:接收速度、转向角等信号。
- 计算模块:根据魔术轮胎模型公式计算侧向力。比如简单的线性魔术轮胎模型公式$F{lat} = C{\alpha} \cdot \alpha$,其中$C_{\alpha}$是侧偏刚度。
% 假设侧偏刚度 C_alpha
C_alpha = 10000;
% 侧偏角 alpha
alpha = 0.1;
% 计算侧向力
F_lat = C_alpha * alpha; 横摆动力学则涉及到车辆围绕垂直轴的转动,和侧向力密切相关。可以通过公式$\dot{r} = \frac{1}{Iz}(lf \cdot F{yf} - lr \cdot F{yr})$来计算横摆角速度的变化率$\dot{r}$,$Iz$是车辆绕 z 轴的转动惯量,$lf$、$lr$分别是前后轴到质心的距离,$F{yf}$、$F{yr}$是前后轮的侧向力。
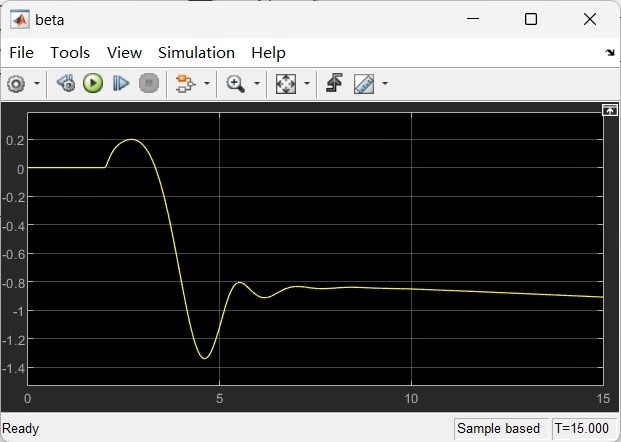
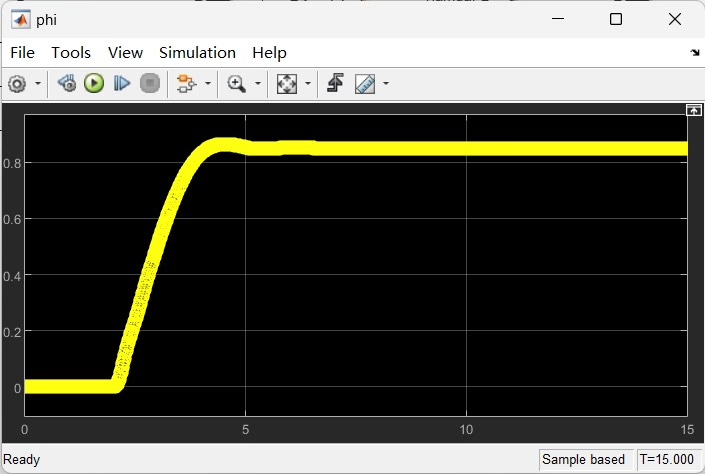
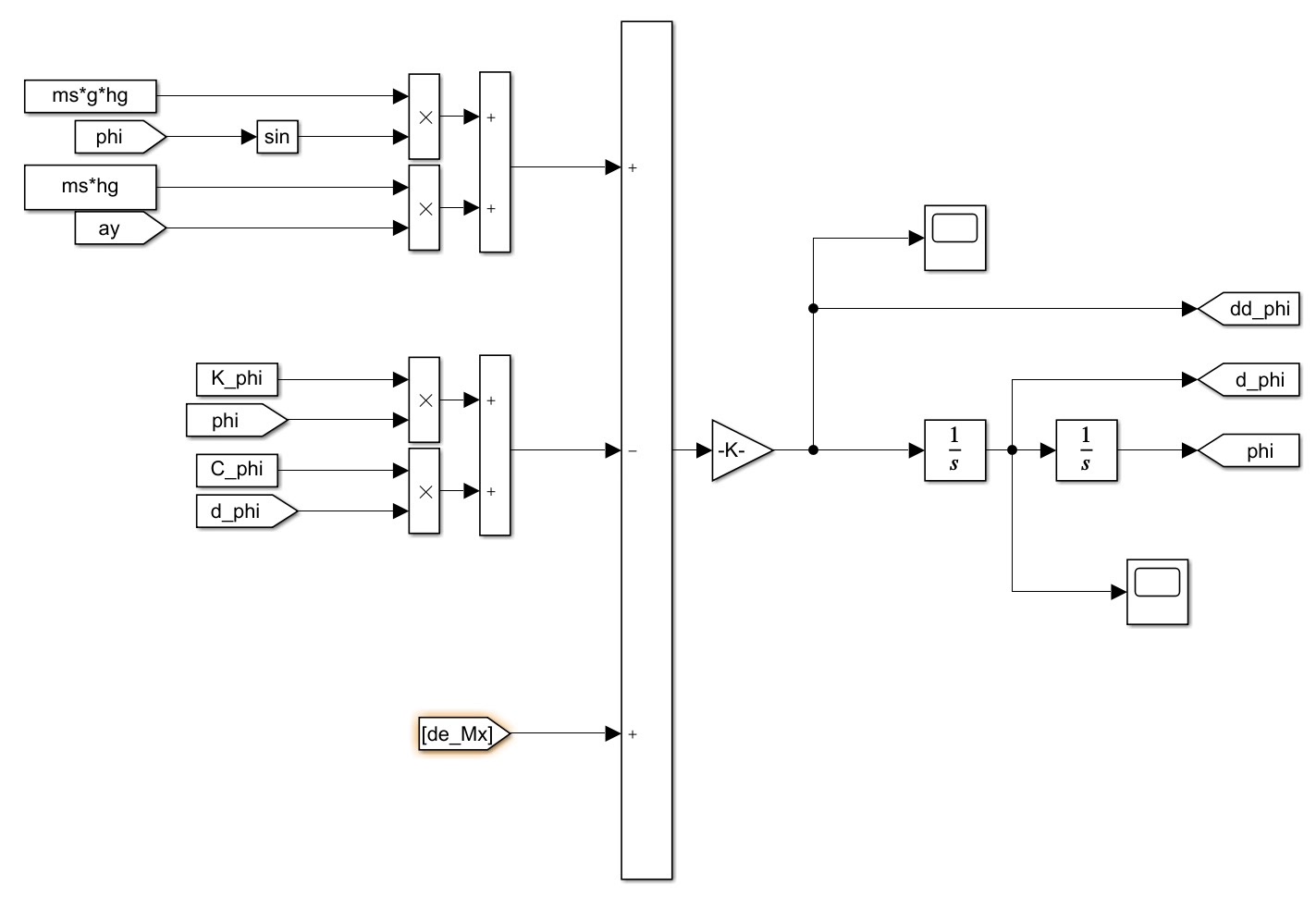
侧倾动力学模型
侧倾动力学主要描述车辆在转弯等情况下车身绕侧倾轴的转动。在 Simulink 里,可以通过建立弹簧 - 阻尼系统来模拟。车辆侧倾运动方程可以写成:
$I{xx}\ddot{\phi} = M{roll}$,$I{xx}$是绕 x 轴的转动惯量,$\ddot{\phi}$是侧倾角加速度,$M{roll}$是侧倾力矩。侧倾力矩又和侧向力、悬架特性等有关。
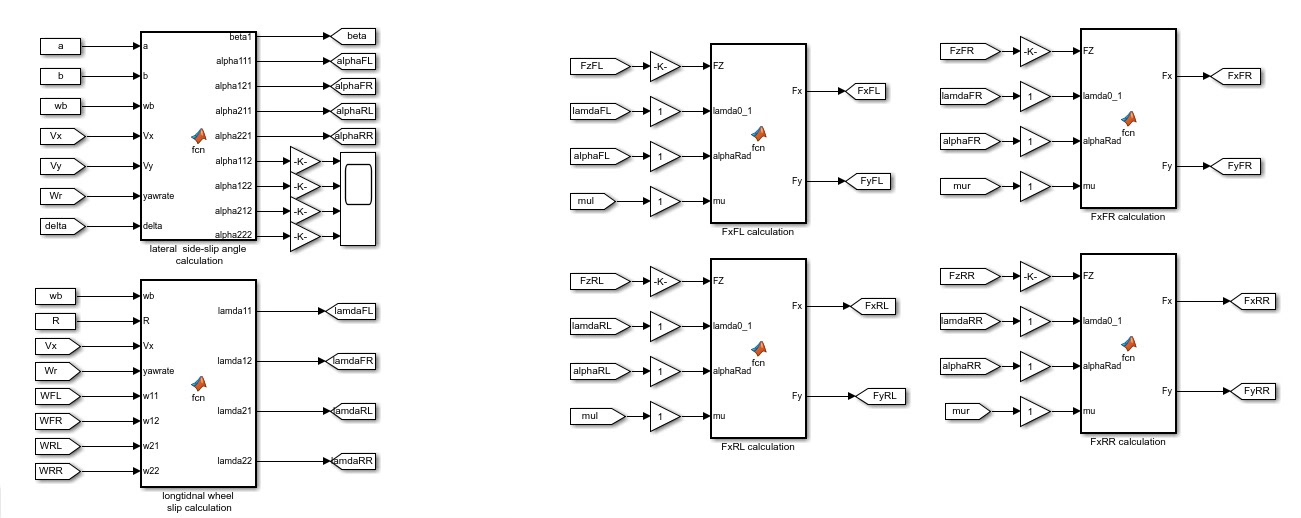
车轮旋转与前轮转向动力学模型
车轮旋转动力学可以通过转矩平衡方程来描述,$T - F{x}r = Iw \dot{\omega}$,$T$是驱动转矩,$F{x}$是轮胎纵向力,$r$是车轮半径,$Iw$是车轮转动惯量,$\dot{\omega}$是车轮角加速度。
前轮转向动力学则控制着前轮的转向角度,通常与驾驶员输入的转向盘角度有关,可以通过传动比等参数转换。
魔术轮胎模型
魔术轮胎模型是这个项目的亮点之一,它能更准确地描述轮胎的力学特性。在 Simulink 里,可以调用相关的库函数或者自己编写函数来实现。比如用 Pacejka 魔术公式:
分布式车辆动力学模型,使用MATLAB/Simulink搭建,包括车辆纵向、侧向、横摆、侧倾、4个车轮旋转、前轮转向动力学模型及魔术轮胎模型。
$y(x) = D \cdot \sin\{C \cdot \arctan[B \cdot x - E \cdot (B \cdot x - \arctan(B \cdot x))]\}$,这里$x$可以是侧偏角等输入参数,$y$是对应的侧向力等输出。
总之,通过在 MATLAB/Simulink 里精心搭建这些模块,我们就能构建出一个相当完整的分布式车辆动力学模型,对车辆的各种运动状态进行模拟和分析啦!这对于汽车工程研发、自动驾驶算法测试等都有着重要的意义呢。
希望这篇分享能给对车辆动力学模型感兴趣的小伙伴们一些启发,大家一起在技术的海洋里畅游呀!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 10
10 0
0- 0



 已为社区贡献26条内容
已为社区贡献26条内容

所有评论(0)