Carsim与Matlab/Simulink联合仿真下四轮电动汽车线控转向失效容错控制模型探索
Carsim与matlab/simulink联合仿真,线控转向,四轮电动汽车转向失效容错控制模型,提供参考文献
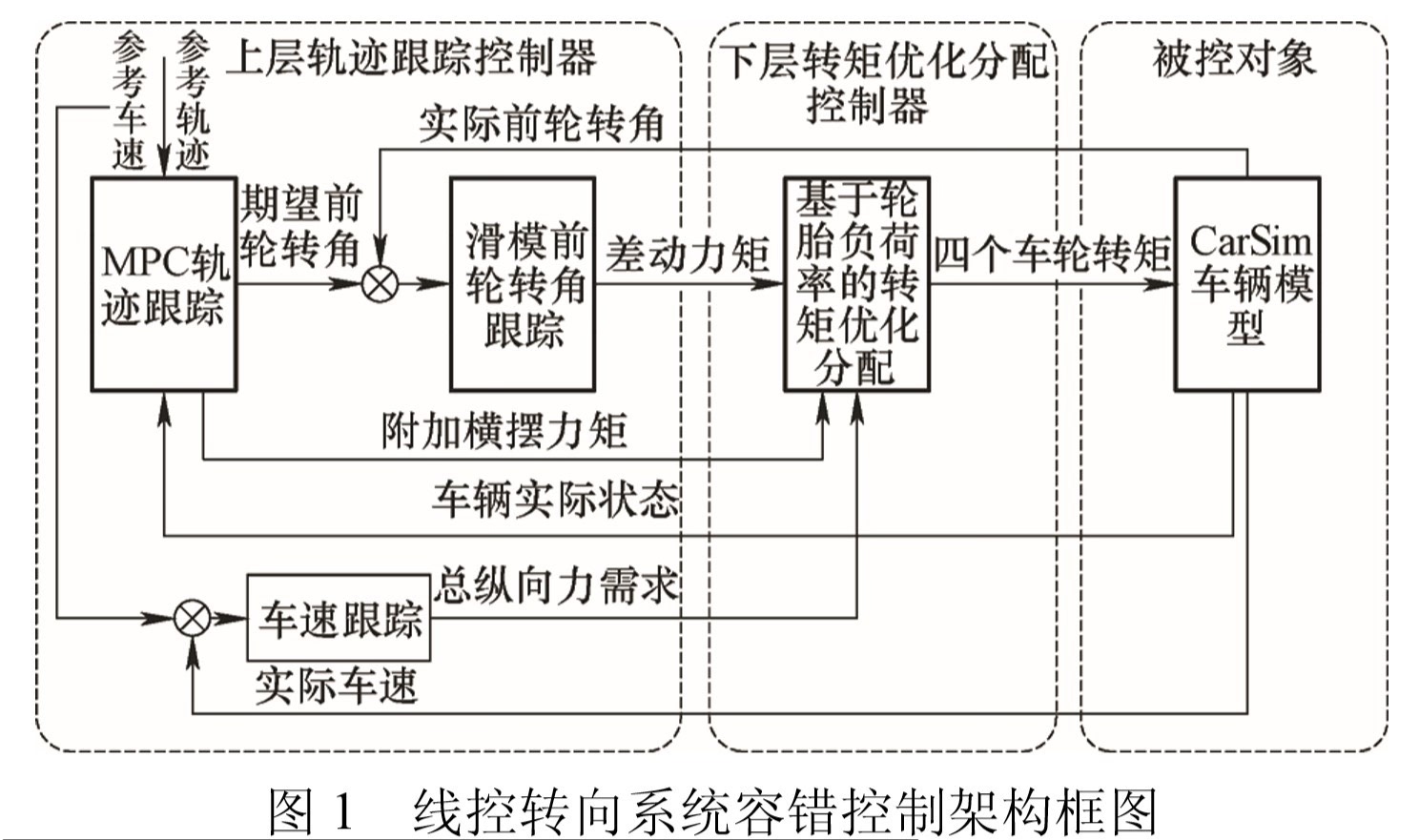
在智能网联汽车发展的浪潮中,四轮电动汽车的线控转向系统成为研究热点。然而,转向系统一旦失效,将严重威胁行车安全。因此,构建转向失效容错控制模型至关重要,借助Carsim与Matlab/Simulink联合仿真,能更高效精准地实现这一目标。
Carsim与Matlab/Simulink联合仿真基础
Carsim是一款专业的车辆动力学仿真软件,它提供了丰富的车辆模型库,涵盖各种类型车辆,能精准模拟车辆在不同工况下的动力学特性。而Matlab/Simulink则以其强大的控制系统设计与仿真能力著称。两者联合,可在Carsim中模拟车辆的实际运行,Matlab/Simulink负责设计控制算法,优势互补。
例如,在联合仿真设置中,首先要在Carsim中配置好车辆模型参数,如车辆质量、轴距、轮胎特性等:
% 在Matlab中设置与Carsim连接参数
carsim_path = 'C:\Program Files\Mechanical Simulation\Carsim202x\bin';
addpath(carsim_path);
cs = carsim_init;上述代码通过addpath添加Carsim路径,carsim_init初始化连接,为后续联合仿真搭建桥梁。
线控转向系统
线控转向系统摆脱了传统机械连接,通过电子信号传递转向指令。其优势在于可实现更灵活的转向特性设计,提升车辆操控性与舒适性。但同时,电子系统的复杂性也增加了失效风险。
Carsim与matlab/simulink联合仿真,线控转向,四轮电动汽车转向失效容错控制模型,提供参考文献
一个简单的线控转向模型在Simulink中的搭建思路如下:
- 输入模块:接收驾驶员的转向盘转角信号。
- 控制算法模块:根据车辆行驶状态(车速、横摆角速度等),计算期望的车轮转角。这里可以使用PID控制算法,代码示例:
% PID控制器参数
Kp = 1;
Ki = 0.1;
Kd = 0.01;
% 误差计算
error = desired_angle - current_angle;
% 积分项计算
integral = integral + error * dt;
% 微分项计算
derivative = (error - previous_error) / dt;
% 控制输出
control_output = Kp * error + Ki * integral + Kd * derivative;
previous_error = error;- 输出模块:将计算得到的车轮转角指令发送给车辆模型。
转向失效容错控制模型
当转向系统出现失效时,容错控制模型要迅速做出反应,确保车辆仍能安全行驶。一种常见思路是基于冗余设计,例如设置多个转向执行器,当一个失效时,其他执行器接管控制。
在Simulink中搭建容错控制模型,可通过状态机模块实现。当检测到转向失效信号时,状态机切换到容错控制状态:
% 检测转向失效信号
if failure_signal == 1
% 切换到容错控制策略
control_strategy = 'fault_tolerant';
else
control_strategy = 'normal';
end在容错控制状态下,重新计算车轮转角指令,例如根据车辆当前速度和横摆角速度,采用不同的控制算法维持车辆稳定。
参考文献
- 《车辆动力学与控制》,喻凡,林逸著。这本书系统阐述了车辆动力学基础以及各种车辆控制系统原理,为线控转向及容错控制理论提供了坚实基础。
- Carsim官方文档。详细介绍了Carsim软件的使用方法、车辆模型参数设置等内容,是Carsim应用的重要参考资料。
- Matlab/Simulink官方文档。全面涵盖了Matlab和Simulink的各种功能、模块使用说明以及代码示例,助力控制算法设计与仿真实现。
通过Carsim与Matlab/Simulink联合仿真,深入研究四轮电动汽车线控转向失效容错控制模型,能为提升车辆安全性与可靠性提供有力支持,推动智能网联汽车技术的发展。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 5
5 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)