光伏交直流混合微电网离网(孤岛)模式双下垂控制Matlab/Simulink仿真探究
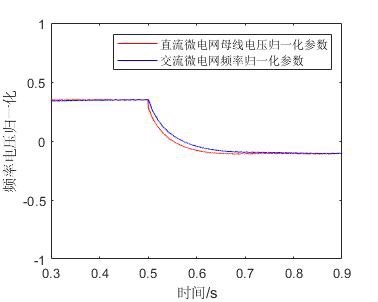
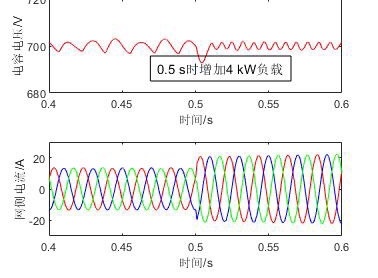
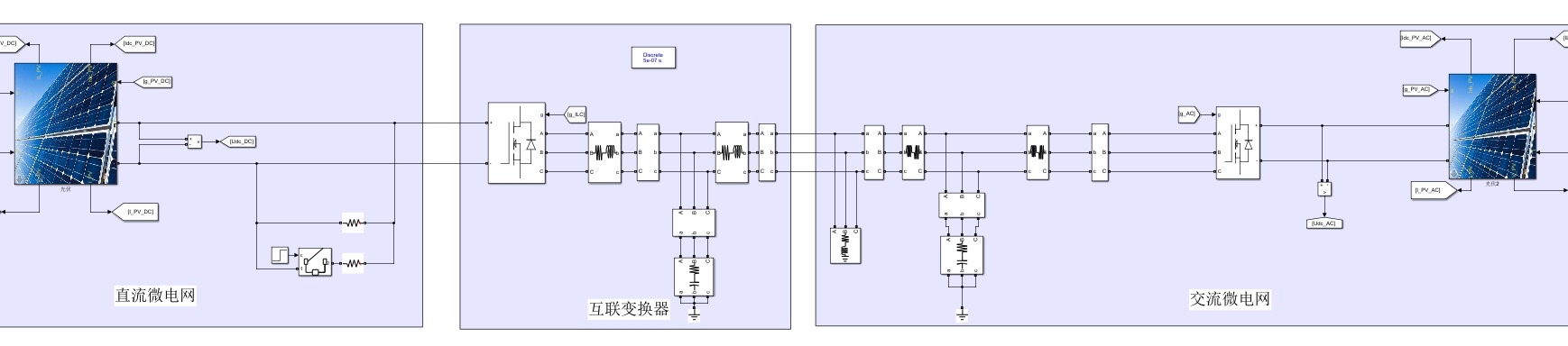
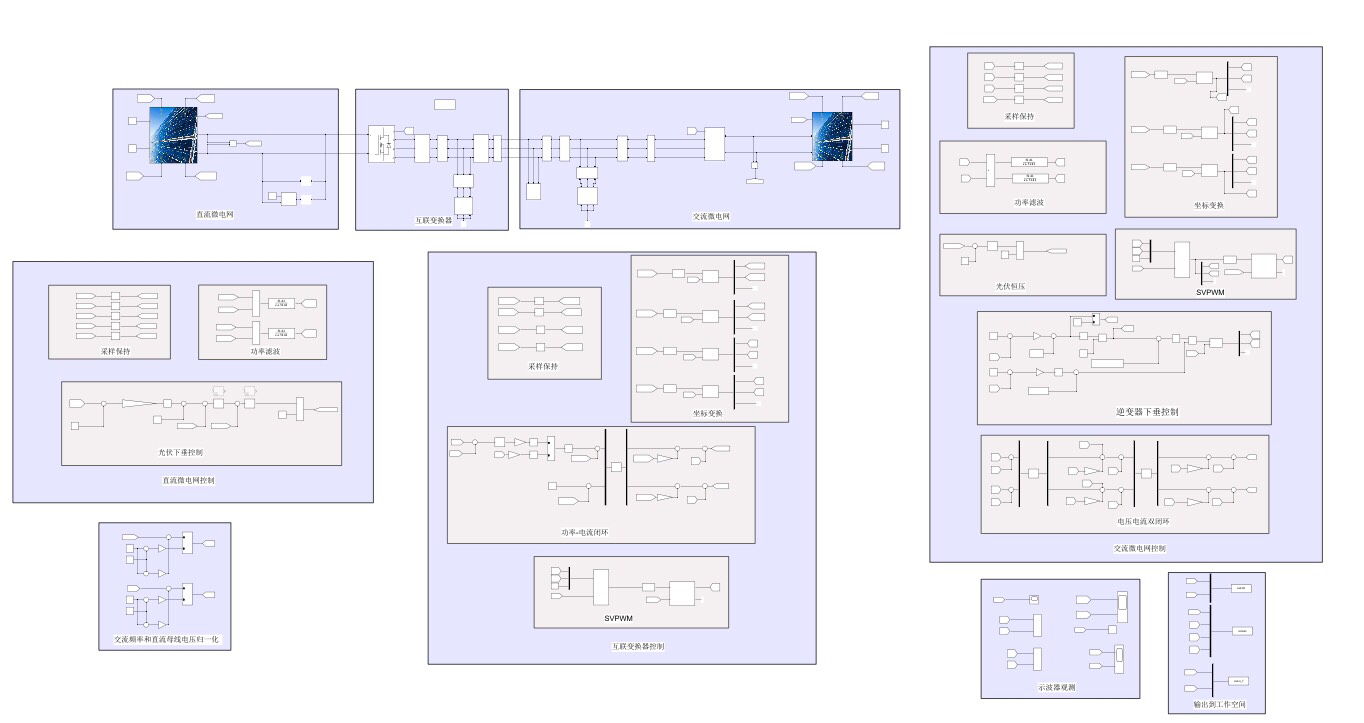
光伏交直流混合微电网离网(孤岛)模式双下垂控制Matlab/Simulink仿真模型 交直流混合微电网结构: 1.直流微电网,由光伏板+Boost变换器组成,最大输出功率10 kW。 2.交流微电网,由光伏板+Boost变换器+LCL逆变器组成,最大输出功率15 kW。 3.互联变换器(ILC),由LCL逆变器组成,用于连接交直流微电网。 模型内容: 1.直流微电网采用下垂控制,控制方式为电压电流双闭环,直流母线额定电压700 V。 2.交流微电网中,Boost变换器采用恒压控制,直流电容电压为700 V,LCL逆变器采用下垂控制,额定频率50 Hz,额定相电压有效值220 V。 3.ILC采用双下垂控制策略,首先将交流母线频率和直流母线电压进行归一化,使其范围控制在[-1,1],之后通过ILC的归一化下垂控制调节交流母线频率和直流母线电压的偏差,最终使二者数值相同。 4.其余部分包括采样保持、坐标变换、功率滤波、SVPWM等环节。 0.5 s时刻负载由12 kW增至16 kW,可以看出系统仍能稳定运行,波形质量良好,且交流母线频率和直流母线电压归一化的参数在ILC控制下趋于一致。 仿真版本为Matlab2020b,由于部分模块低版本没有,因此只能用20b或以上版本,想具体了解双下垂控制的可加好友获取参考文献
在可再生能源日益受到重视的当下,光伏交直流混合微电网技术有着重要意义。今天咱就来讲讲光伏交直流混合微电网离网(孤岛)模式双下垂控制的Matlab/Simulink仿真模型。
交直流混合微电网结构剖析
- 直流微电网:由光伏板搭配Boost变换器构成,其最大输出功率能达到10kW 。光伏板吸收太阳能并转化为直流电,Boost变换器则对电压进行提升,以满足后续负载及系统的需求。
- 交流微电网:由光伏板、Boost变换器以及LCL逆变器组成,最大输出功率为15kW 。光伏板产生的直流电先经Boost变换器升压,之后通过LCL逆变器将直流转换为所需的交流电,给交流负载供电。
- 互联变换器(ILC):由LCL逆变器组成,起到连接交直流微电网的关键作用,协调两者间的功率流动与电气参数匹配。
模型详细内容解读
1. 直流微电网下垂控制
直流微电网运用下垂控制,控制方式为电压电流双闭环,直流母线额定电压设定为700V 。在代码实现上,我们可以通过以下方式简单示意电压外环控制(这里只是简化示意,实际代码更复杂):
% 假设已经采集到直流母线电压udc和给定电压udc_ref
kp_voltage = 0.1; % 电压环比例系数
ki_voltage = 0.01; % 电压环积分系数
error_voltage = udc_ref - udc;
integral_voltage = integral_voltage + error_voltage * Ts; % Ts为采样时间
control_signal_voltage = kp_voltage * error_voltage + ki_voltage * integral_voltage;这里通过计算实际电压与给定电压的偏差,经过比例积分调节来产生控制信号,以维持直流母线电压稳定。
2. 交流微电网控制策略
- Boost变换器:采用恒压控制,直流电容电压设定为700V 。它保证了进入LCL逆变器的直流电压稳定。
- LCL逆变器:采用下垂控制,额定频率50Hz,额定相电压有效值220V 。以下为简单的频率下垂控制代码示意:
% 假设采集到的逆变器输出频率f和额定频率f_nom
kp_frequency = 0.05; % 频率下垂系数
P = calculate_power(); % 计算逆变器输出功率
f = f_nom - kp_frequency * P; % 根据下垂特性调整频率根据逆变器输出功率来调整输出频率,实现下垂控制的基本功能。
3. ILC双下垂控制策略
ILC的双下垂控制很有意思。首先要将交流母线频率和直流母线电压进行归一化,让其范围控制在[-1,1] 。代码实现归一化可以这样:
% 假设已经获取交流母线频率f_ac和直流母线电压udc
f_ac_max = 52; % 交流母线频率最大允许值
f_ac_min = 48; % 交流母线频率最小允许值
udc_max = 720; % 直流母线电压最大允许值
udc_min = 680; % 直流母线电压最小允许值
f_ac_norm = 2 * (f_ac - f_ac_min) / (f_ac_max - f_ac_min) - 1;
udc_norm = 2 * (udc - udc_min) / (udc_max - udc_min) - 1;之后通过ILC的归一化下垂控制调节交流母线频率和直流母线电压的偏差,使二者数值最终相同,从而有效协调交直流微电网间的功率流动。
4. 其余环节
像采样保持、坐标变换、功率滤波、SVPWM等环节也不可或缺。比如SVPWM环节,它能有效控制逆变器的输出电压,提高电能质量。以三相SVPWM为例,简单代码示意如下:
% 假设已经计算出三相调制波信号ua, ub, uc
theta = 0; % 初始角度
T = 1/50; % 基波周期
for t = 0:Ts:T % Ts为采样时间
theta = theta + 2 * pi * 50 * Ts;
ua = Um * sin(theta);
ub = Um * sin(theta - 2 * pi / 3);
uc = Um * sin(theta + 2 * pi / 3);
% 之后进行扇区判断和开关时间计算等步骤,此处省略详细代码
end通过这样的计算生成相应的开关信号,控制逆变器的开关状态。
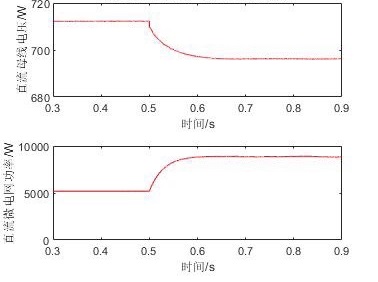
光伏交直流混合微电网离网(孤岛)模式双下垂控制Matlab/Simulink仿真模型 交直流混合微电网结构: 1.直流微电网,由光伏板+Boost变换器组成,最大输出功率10 kW。 2.交流微电网,由光伏板+Boost变换器+LCL逆变器组成,最大输出功率15 kW。 3.互联变换器(ILC),由LCL逆变器组成,用于连接交直流微电网。 模型内容: 1.直流微电网采用下垂控制,控制方式为电压电流双闭环,直流母线额定电压700 V。 2.交流微电网中,Boost变换器采用恒压控制,直流电容电压为700 V,LCL逆变器采用下垂控制,额定频率50 Hz,额定相电压有效值220 V。 3.ILC采用双下垂控制策略,首先将交流母线频率和直流母线电压进行归一化,使其范围控制在[-1,1],之后通过ILC的归一化下垂控制调节交流母线频率和直流母线电压的偏差,最终使二者数值相同。 4.其余部分包括采样保持、坐标变换、功率滤波、SVPWM等环节。 0.5 s时刻负载由12 kW增至16 kW,可以看出系统仍能稳定运行,波形质量良好,且交流母线频率和直流母线电压归一化的参数在ILC控制下趋于一致。 仿真版本为Matlab2020b,由于部分模块低版本没有,因此只能用20b或以上版本,想具体了解双下垂控制的可加好友获取参考文献
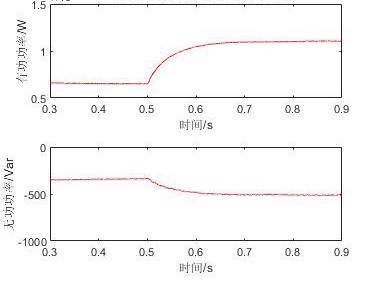
在0.5s时刻负载由12kW 增至16kW ,从仿真结果能明显看到系统依旧能稳定运行,波形质量也相当不错,而且交流母线频率和直流母线电压归一化的参数在ILC控制下逐渐趋于一致,验证了整个控制策略的有效性。
这里要注意,本次仿真版本为Matlab2020b ,因为部分模块在低版本中不存在,所以建议使用20b或以上版本。要是有朋友想深入了解双下垂控制,可以加我好友获取相关参考文献。希望这篇博文能给研究相关领域的小伙伴一些启发和帮助!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 10
10 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)