混动软件P1P3开发原理解析
混动软件P1P3开发原理解析说明 1.混动架构:P1P3架构 2.软件功能:驱动控制,能量回收,能量管理,混动模式控制,发动机启停管理,串并联切换控制,上下电控制,故障诊断及处理 3.可以按照需求提供全部软件开发,也可以按照功能提供单个软件功能开发 4.软件功能策略经过实车验证 5.开发流程符合V模型,可以提供从系统需求到整车验证整个验证

在混动汽车领域,P1P3架构正逐渐崭露头角。今天咱就来深入剖析一下基于P1P3架构的混动软件开发原理。
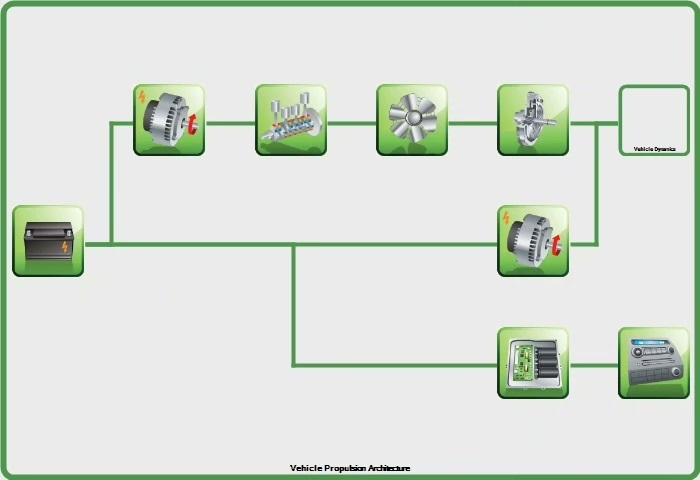
一、P1P3混动架构
P1P3架构中,P1位置电机通常集成在发动机与离合器之间,主要用于启动发动机、发电以及在某些工况下辅助发动机输出动力。而P3位置电机则位于变速器输出端,直接驱动车轮,能提供强大的纯电驱动能力以及高效的能量回收。这种架构结合了两者优势,使得混动汽车在不同工况下都能高效运行。
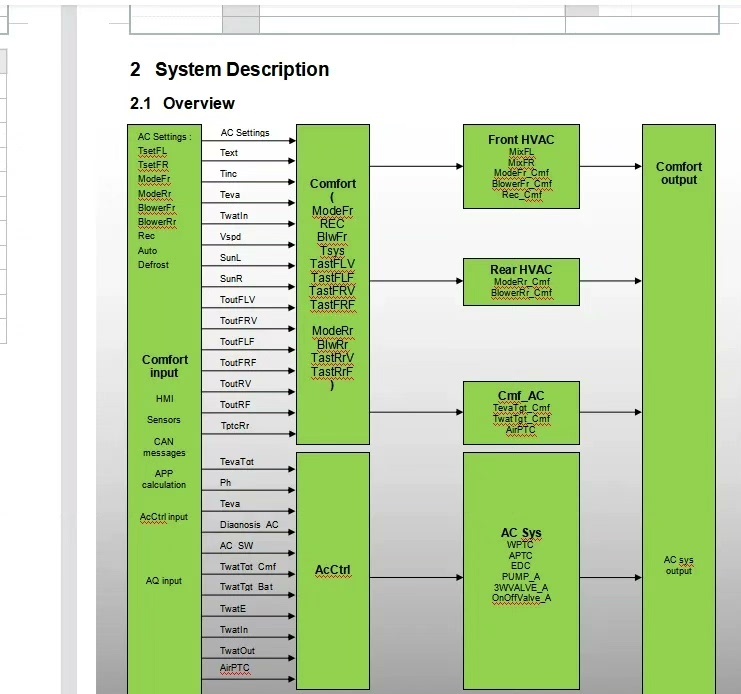
二、软件功能大揭秘
- 驱动控制
驱动控制功能是让车辆动起来的关键。在代码层面,以简单的Python伪代码示例:
def drive_control(mode, power_request):
if mode == "EV":
# 纯电模式下,主要由P3电机驱动
p3_motor_power = power_request
p1_motor_power = 0
elif mode == "HEV":
# 混动模式下,根据工况分配P1和P3电机以及发动机的动力
engine_power = calculate_engine_power(power_request)
p1_motor_power = calculate_p1_motor_power(engine_power)
p3_motor_power = power_request - engine_power - p1_motor_power
return p1_motor_power, p3_motor_power这里通过判断当前车辆运行模式(EV纯电或HEV混动),来合理分配P1和P3电机的动力,满足驾驶者的动力请求。
- 能量回收
能量回收功能在车辆减速或制动时发挥作用,将车辆的动能转化为电能存储起来。代码实现思路大概如下(同样以Python伪代码):
def energy_recovery(speed, braking_force):
if braking_force > 0:
# 根据车速和制动力计算可回收的能量
recoverable_energy = calculate_recoverable_energy(speed, braking_force)
# 控制P3电机进行发电
p3_motor_generate_power(recoverable_energy)
return recoverable_energy
return 0当检测到制动力时,计算可回收能量,并让P3电机工作在发电状态,将回收的能量存储到电池中,提高能源利用率。
- 能量管理
能量管理功能需要综合考虑电池电量、车辆工况、驾驶需求等多方面因素。它就像是一个“大管家”,协调各个部件的能量分配。
def energy_management(battery_soc, driving_condition):
if battery_soc < LOW_SOC_THRESHOLD and driving_condition == "high_speed":
# 当电池电量低且高速行驶时,启动发动机发电并辅助驱动
start_engine()
p1_motor_mode = "generate"
p3_motor_mode = "assist"
elif battery_soc > HIGH_SOC_THRESHOLD and driving_condition == "low_speed":
# 当电池电量高且低速行驶时,优先纯电驱动
stop_engine()
p1_motor_mode = "idle"
p3_motor_mode = "drive"
return p1_motor_mode, p3_motor_mode根据电池的荷电状态(SOC)和行驶工况,来决定发动机的启停以及P1、P3电机的工作模式。
- 混动模式控制
混动模式控制负责在纯电、混动等多种模式之间平滑切换。这涉及到对车辆各种参数的实时监测和判断。
def hybrid_mode_control(current_mode, battery_soc, power_request):
if current_mode == "EV" and (battery_soc < LOW_SOC_THRESHOLD or power_request > EV_MAX_POWER):
return "HEV"
elif current_mode == "HEV" and battery_soc > HIGH_SOC_THRESHOLD and power_request < HEV_MIN_POWER:
return "EV"
return current_mode依据电池电量和动力请求等条件,决定是否需要切换混动模式,确保车辆始终处于最优运行状态。
- 发动机启停管理
发动机启停管理直接关系到燃油经济性。在不需要发动机工作时及时关闭,需要时快速启动。
def engine_start_stop_management(battery_soc, driving_condition):
if battery_soc > START_ENGINE_SOC_THRESHOLD and driving_condition == "stop":
stop_engine()
elif battery_soc < STOP_ENGINE_SOC_THRESHOLD and driving_condition == "start":
start_engine()根据电池电量和车辆行驶状态(停车或起步等)来控制发动机的启停。
- 串并联切换控制
在P1P3架构中,串并联切换能让车辆在不同工况下选择最优驱动方式。
def series_parallel_switch(battery_soc, driving_speed):
if battery_soc > SWITCH_SOC_THRESHOLD and driving_speed < SWITCH_SPEED_THRESHOLD:
return "parallel"
else:
return "series"依据电池电量和车速等因素,决定车辆采用串联还是并联驱动方式,以实现最佳性能和效率。
- 上下电控制
上下电控制确保车辆在启动和关闭过程中各部件的有序工作。
def power_on_off_control(operation):
if operation == "power_on":
# 依次启动电池管理系统、电机控制器等关键部件
start_bms()
start_motor_controller()
elif operation == "power_off":
# 依次关闭电机、发动机等部件,并进行系统自检
stop_motor()
stop_engine()
system_self_check()按照一定顺序启动和关闭车辆部件,保证系统的稳定性和安全性。
- 故障诊断及处理
故障诊断及处理功能时刻监测车辆各个部件的运行状态,及时发现并处理故障。
def fault_diagnosis_and_handle():
component_status = get_component_status()
for component, status in component_status.items():
if status == "fault":
# 根据故障类型采取相应处理措施
if component == "p1_motor":
handle_p1_motor_fault()
elif component == "p3_motor":
handle_p3_motor_fault()通过获取各部件状态,一旦发现故障,根据故障部件类型采取针对性处理,确保车辆安全运行。
三、开发服务多样化
我们既可以按照需求提供全部软件开发,涵盖上述所有功能,打造一套完整的混动软件解决方案。也能够按照功能提供单个软件功能开发,比如只专注于能量回收功能的优化升级,满足不同客户的多样化需求。
四、实车验证与开发流程
这些软件功能策略可不是纸上谈兵,都经过了实车验证。并且开发流程严格符合V模型,从系统需求分析开始,到软件设计、编码、单元测试、集成测试,再到整车验证,每一步都环环相扣。在系统需求阶段,充分了解混动汽车实际运行需求;软件设计阶段规划好各功能模块架构;编码实现功能;单元测试保证每个模块正确性;集成测试确保模块间协同工作良好;最终整车验证确保整个软件系统在实际车辆环境中稳定可靠运行。
混动软件P1P3开发原理解析说明 1.混动架构:P1P3架构 2.软件功能:驱动控制,能量回收,能量管理,混动模式控制,发动机启停管理,串并联切换控制,上下电控制,故障诊断及处理 3.可以按照需求提供全部软件开发,也可以按照功能提供单个软件功能开发 4.软件功能策略经过实车验证 5.开发流程符合V模型,可以提供从系统需求到整车验证整个验证
总之,基于P1P3架构的混动软件开发是一个复杂而又极具挑战性的过程,通过合理的功能设计、严格的开发流程以及充分的实车验证,为混动汽车的高效运行提供坚实保障。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 9
9 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)