各种高程定义及高精度GNSS代替水准新算法
本文是对大地高、正高和正常高的解释,主要来源于参考文献的内容。
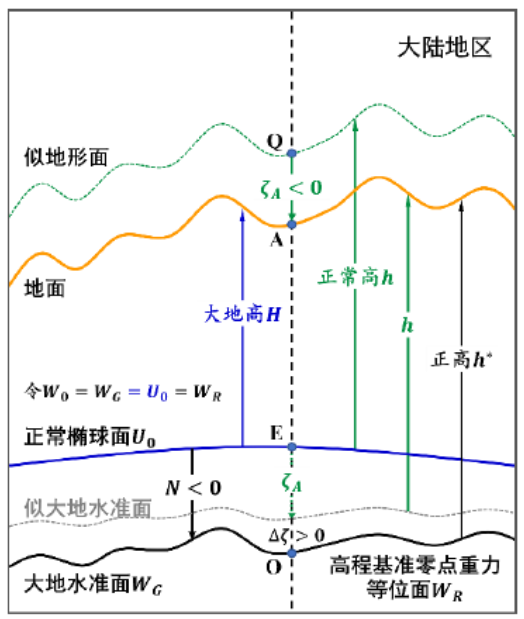
1、正高
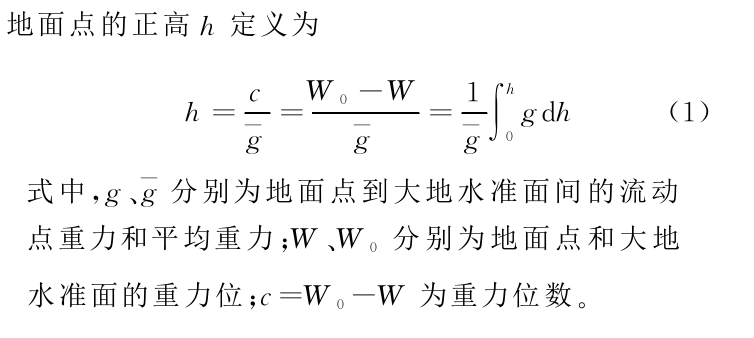
所谓流动点是指从A到O之间的点。
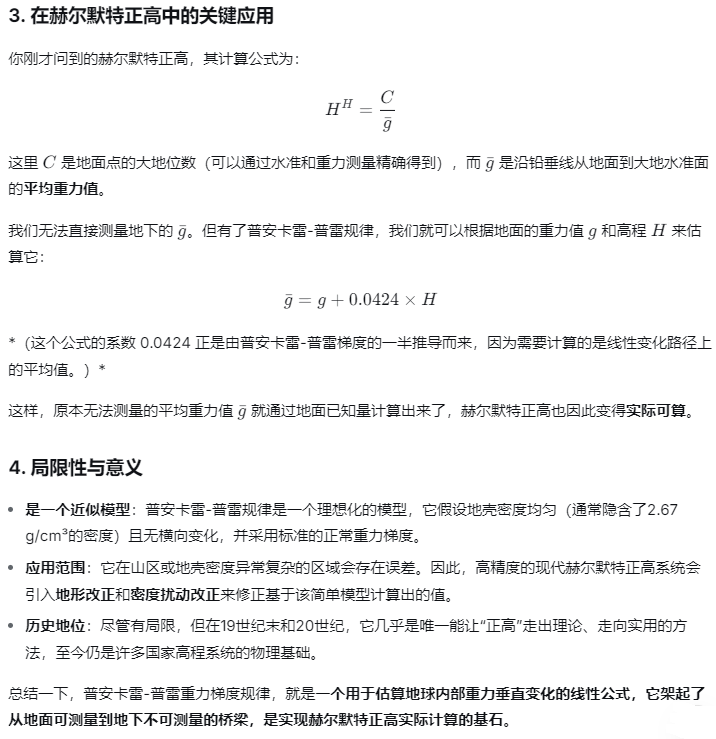
2、Helmert正高
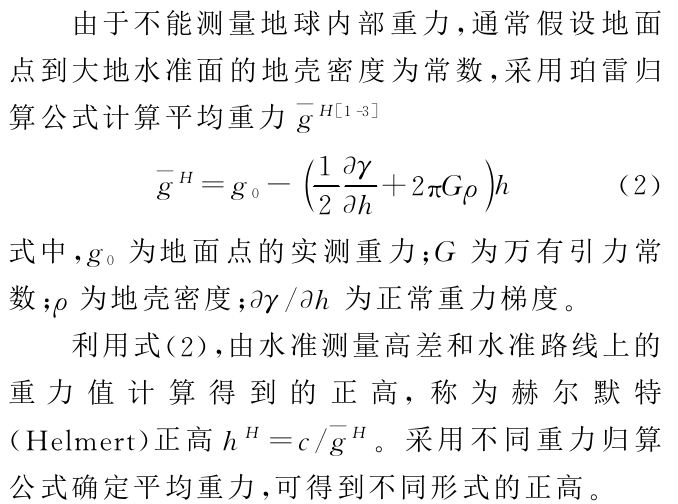
珀雷公式即珀雷重力梯度规律。
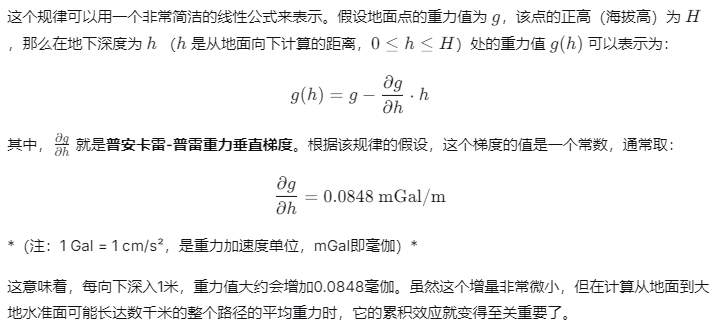
“普安卡雷-普雷重力梯度规律”(Poincaré-Prey Gravity Gradient)是物理大地测量学中一个非常重要的概念。它主要出现在我们刚才讨论的赫尔默特正高(Helmert Orthometric Height)的计算中,用于解决一个核心难题:如何在不挖开地球的情况下,估算出地面点到大地水准面之间整个岩层的平均重力值?
简单来说,它提供了一个描述重力值在地球内部随深度增加而变化的简化数学模型。
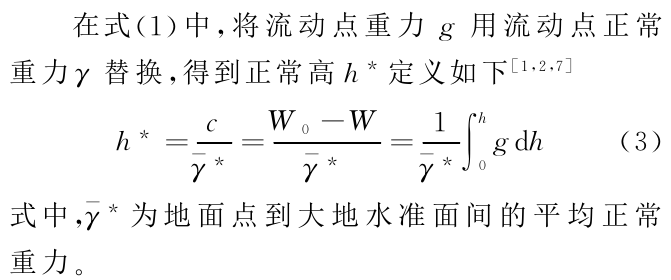
3、正常高
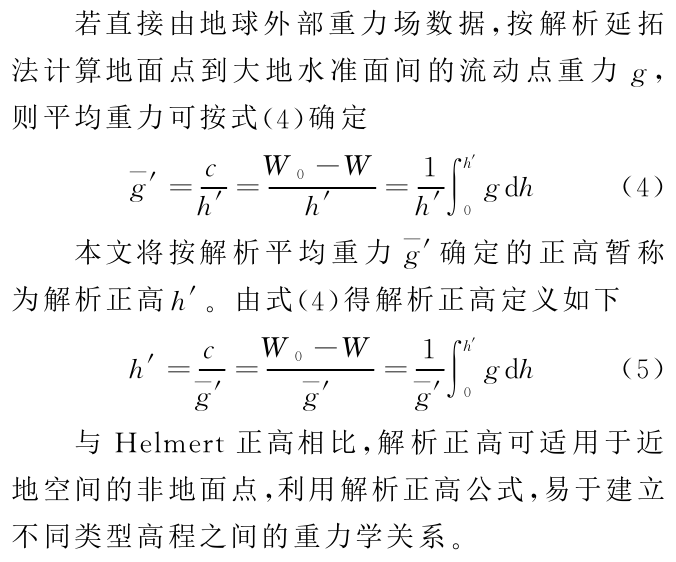
4、解析正高
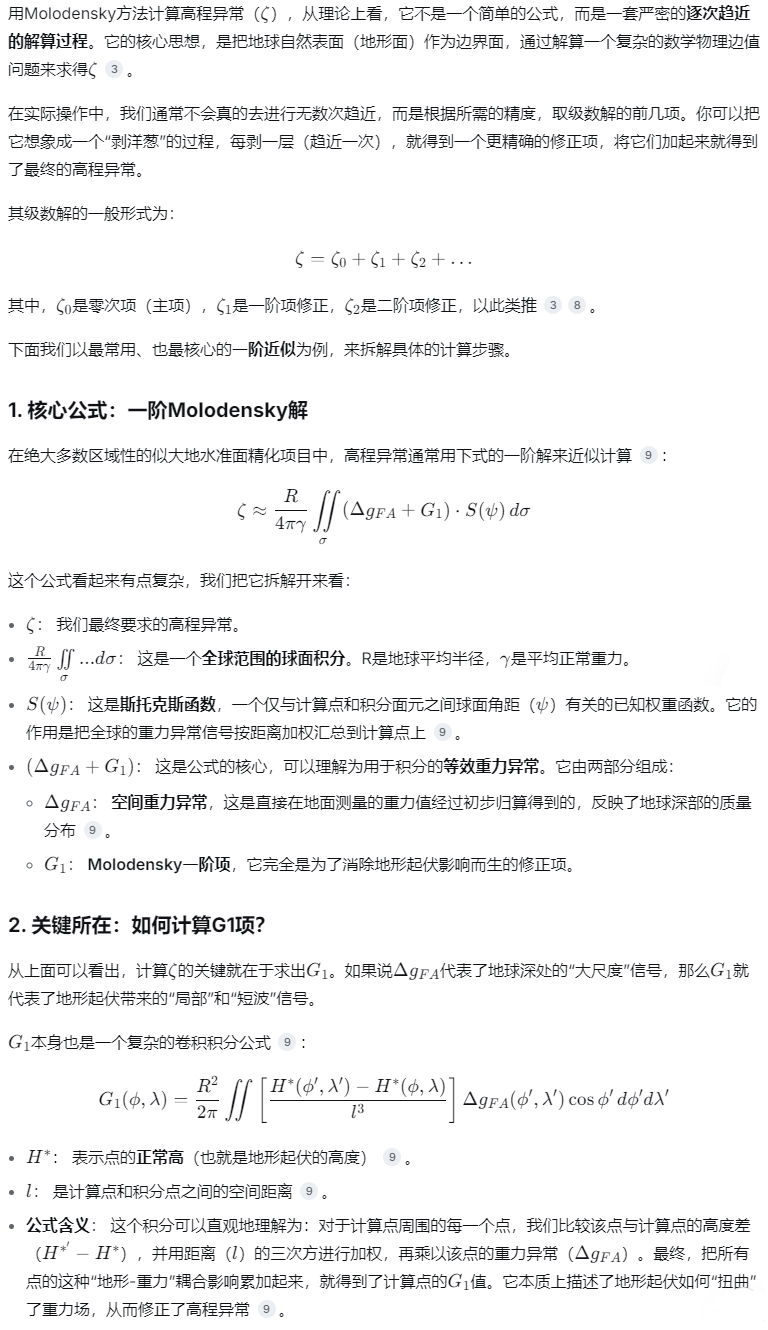
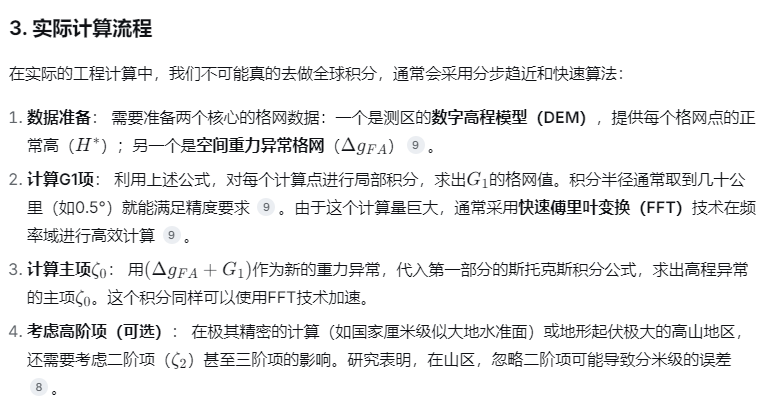
5、Molodensky正常高
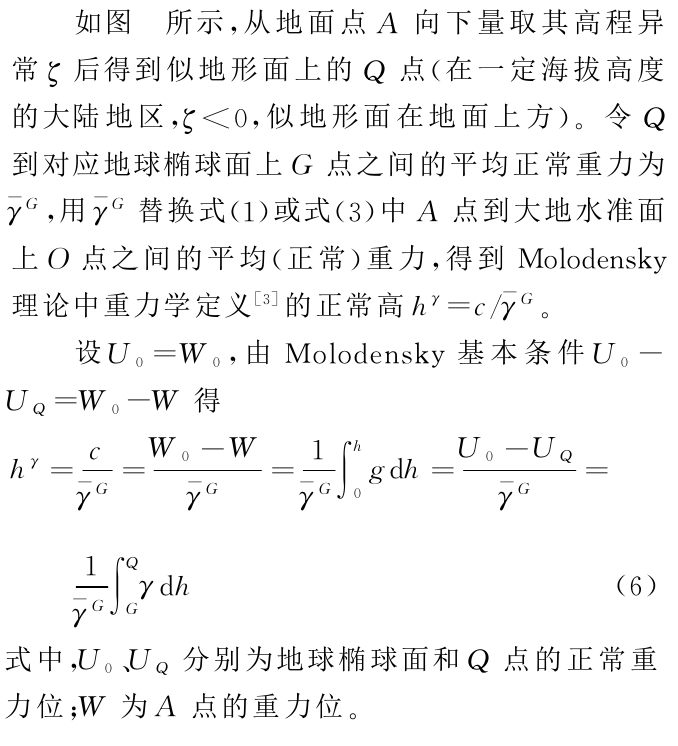
Molodensky提出了一套完整的理论来解决地球形状的测定问题。在这个理论框架下,他重新定义了高程系统。
核心定义:地面一点P的Molodensky正常高,是该点沿正常重力线(即椭球法线)到似大地水准面的距离。等于该点的似地形面沿正常重力线(即椭球法线)到椭球面的距离。
Molodensky理论提供了一种严密的方法来求解高程异常 。它通过解算一个以地球表面为边界(称为“似地球表面”或“地形表面”)的边值问题,直接计算出高程异常,从而避开了将地球质量进行调整或归算的步骤。
通过Molodensky理论计算出的高程异常,配合GNSS大地高,就能直接得到Molodensky正常高。

6、互相之间的关系
因此,正高不可求。Helmert正高、解析正高可求,但是并不相等,前者使用珀雷公式计算地面点到大地水准面的平均重力,后者使用地球重力场模型计算地面点到大地水准面的平均重力。正常高、Molodensky正常高计算公式不同,前者计算地面点到大地水准面的平均正常重力,后者计算似地形面到椭球面的平均正常重力。
7、非地面点的高程异常及其正常高起算面
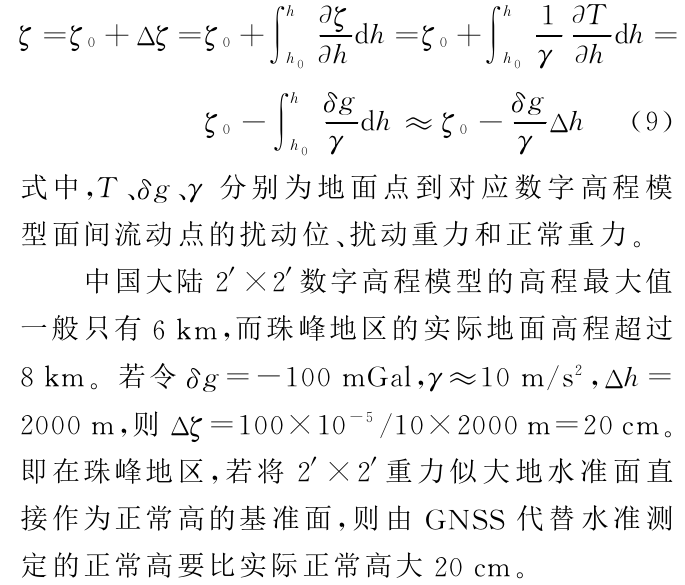
由式(3)或式(6)可知,正常高定义适合非地面点,而由重力方法确定的似大地水准面是相对 计算者选定、用于表示地面的特定数字高程模型而言。设在似大地水准面模型计算时用2′×2′数 字高程模型代表地面,若某地面点A的正常高为h,由2′×2′数字高程模型内插得到该点在数字高程模型面上的正常高为h0,由对应的2′×2′似大地水准面模型内插得到该点在数字高程模型面上的高程异常为 ζ0,则A点的实际高程异常 ζ 为:
将似大地水准面作为正常高的起算面是不严密的。在严格意义上所有类型高程系统 的基准面都是重力等位面。中国国家1985高程基准采用正常高系统,高程基准面是过青岛零点 的大地水准面。
8、地面点正常高与Molodensky正常高的差别
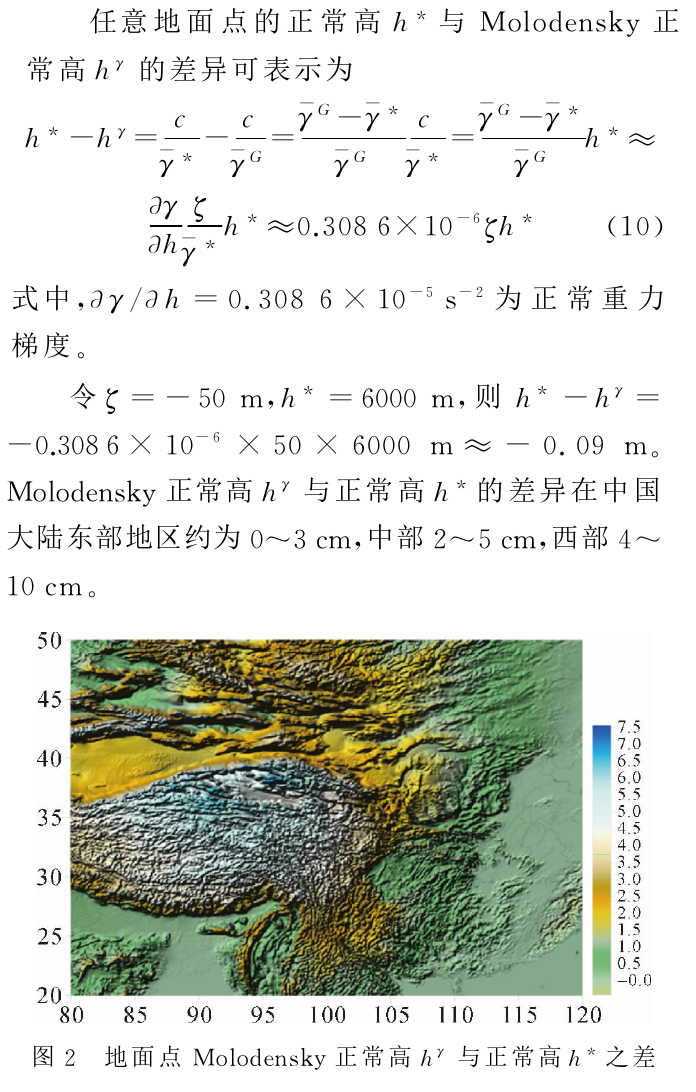
在中国国家水准网成果中,水准点的正常高属于Molodensky正常高系统,起算面为似大地水准面。
9、解析正高h′与H-N的差别测试分析
中国大陆东部、中部北方和南方、西部北方和南方各取1点,分别从大地水准面起算,以大地 高每增加100m为考察点,用Eigen6C4重力场模型计算考察点的重力位W、大地水准面的重力位 W0、以及考察点到大地水准面间流动点的重力g,按定义计算解析正高h′=(W0-W)/g′。以 h=H-N为x轴,以h与解析正高h′之差h- h′为y轴绘图,见下图。
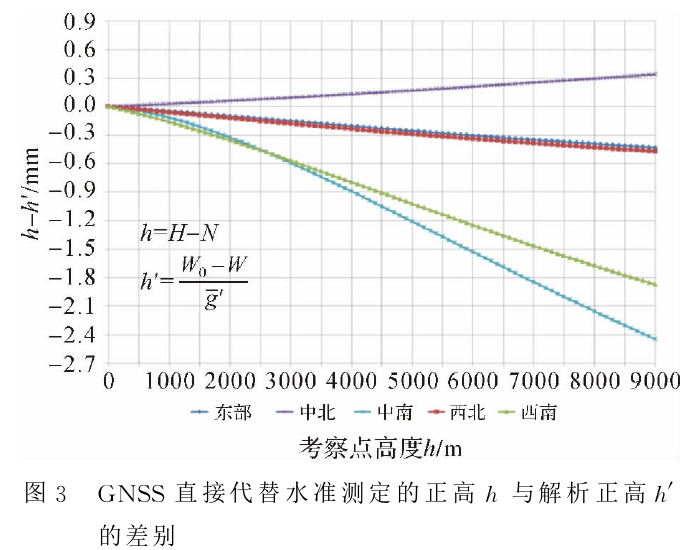
由图3可知,在整个中国大陆地区,GNSS直接代替水准测定的正高h=H-N与解析正高 h′相差不到2mm。忽略由地球重力场模型计算其对应大地水准面上重力位W0的计算误差,则有:h′=H-N。可见,等解析正高面与大地水准面平行,GNSS代替水准能直接测定地面点的解析正高。
10、Molodensky正常高与H-N的差别测试分析
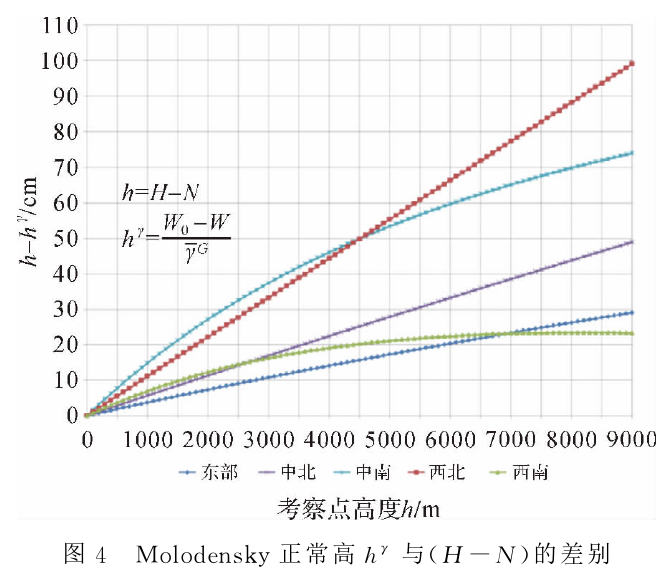
由图4可知,h-hγ随高度增大而增大,在大地水准面附近接近零,在中国西部北方超过 0.5m;在中国东部地区,h-hγ一般小于0.15m。
11、GNSS代替水准测量
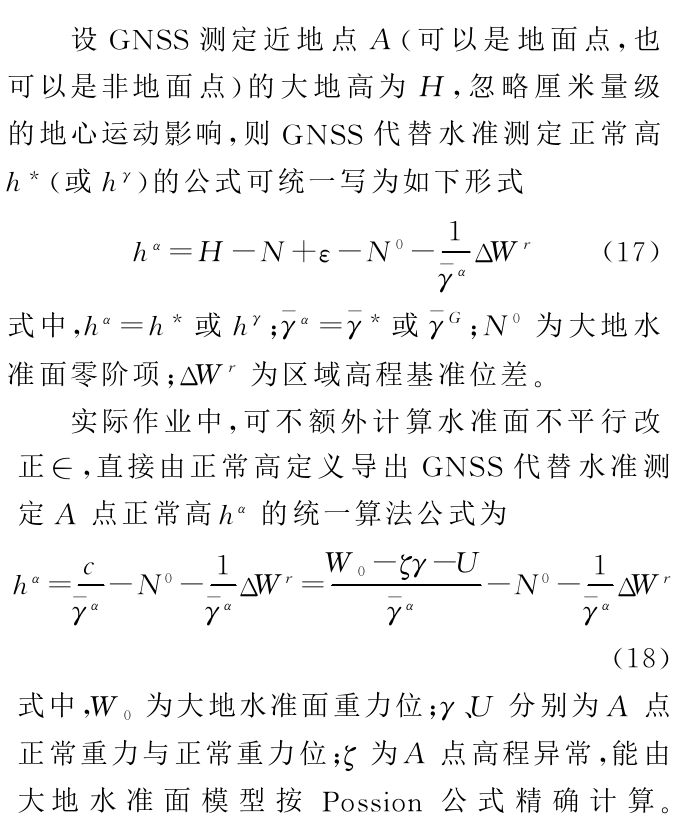
用GNSS(全球导航卫星系统)代替水准测量来测定正常高,核心思路是利用GNSS测出高精度的大地高,再通过各种方法求出该点的高程异常,最终通过一个简单公式算出正常高。
简单来说,原理可以用下面这个公式概括:
正常高 = 大地高 — 高程异常
这里的“大地高”由GNSS直接测定,是地面点沿法线到参考椭球面的距离。而“高程异常”则是个关键变量,它描述了似大地水准面到参考椭球面的差距。因此,GNSS代替水准测量的各种方法,本质上都是在想办法精确求定这个高程异常值。

无论采用哪种方法,都需要遵循一些关键的实施要求,以保证最终成果的可靠性:
核心原则:GNSS代替水准的实质是 “GNSS+少量水准” 。必须有一定数量的已知水准点作为控制基础,不能完全脱离水准测量。
联测点布设:已知水准点应均匀分布在测区四周和内部,外围点最好能包围整个测区。在平原地区,联测的水准点不宜少于6个;在丘陵或山地,不宜少于10个。
精度评定:必须预留一部分已知点不参与拟合,作为外部检核点。检核点数量不应少于未知点总数的10%,用于客观评估最终结果的精度。
12、GNSS代替水准测定近地点正常高的统一算法
13、结论
本文从高程系统定义出发,探讨高程基准面 的重力等位性质,测试分析不同类型高程系统地 面点高程之间的差异,考察GNSS代替水准与实 际水准测量成果的一致性,进而提出新的GNSS 代替水准算法。主要结论包括:
(1)当精度要求达到厘米级水平时,正常高的基准面也应是大地水准面。中国国家1985高程基准采用正常高系统,其高程基准面是过青岛零点的大地水准面。(正常高的平均重力是地面点到大地水准面,Molodensky正常高的平均重力是地面点到似大地水准面或似地形面到椭球面,它们在cm级别是等价的,而正常高的基准就是过青岛零点的大地水准面)
(2)近地空间中等解析正高面与大地水准面平行,GNSS代替水准能直接测定地面点的解析正高,但正常高系统更有利于描述地势和地形起伏。(解析正高的平均重力是地面点到大地水准面的平均重力,与Helmert正高基于理想模型不一样。)
(3)本文给出的GNSS代替水准测定近地点正常高算法,大地高误差对正常高结果的影响比大地水准面误差大,前者影响约为后者的1.5倍。
参考文献
高程系统定义分析与高精度GNSS代替水准算法_章传银2017

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 6
6 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)