永磁同步电机最大转矩电流比控制(MTPA)+弱磁控制的仿真模型设计与实现
永磁同步电机最大转矩电流比控制MTPA+弱磁控制MATLAB/simulink仿真模型,带有设计原理说明文档。 仿真模型已经调试好,可直接运行出波形,仿真波形完美无缺。
本文将详细探讨永磁同步电机(PMSM)最大转矩电流比控制(MTPA)和弱磁控制的仿真模型设计与实现过程,该仿真模型基于MATLAB/Simulink,可以直观展示电机在不同运行状态下的性能。该仿真模型已经调试完毕,能够直接运行并生成完美的波形,便于研究和分析。
一、引言
永磁同步电机因其高效、高精度等特性,在工业自动化、电动汽车等领域得到了广泛应用。为提高其性能,通常采用矢量控制策略,其中最大转矩电流比控制(MTPA)和弱磁控制(MAT)是两种核心的控制方法。
MTPA控制旨在在给定的定子电流下,使输出转矩最大化,从而提高能量的利用率。而弱磁控制则用于在高速运行时维持恒定的输出转矩,通过调节磁场的方向来实现。
本文将详细介绍这两种控制方法的设计原理,并基于MATLAB/Simulink建立仿真模型,以直观展示其工作效果。
二、设计原理
- PMSM数学模型
永磁同步电机的动态数学模型可以描述为:
\[
\begin{aligned}
\dot{\lambda}d &= -Rs id + \omegar \lambda_q \\
\dot{\lambda}q &= -Rs iq - \omegar \lambdad + Kp \\
Te &= \frac{3}{2} (p \phif iq - p \lambdad i_q)
\end{aligned}
\]
其中:
- \( \lambdad \) 和 \( \lambdaq \) 是d轴和q轴的磁链
- \( id \) 和 \( iq \) 是d轴和q轴的电流
- \( R_s \) 是定子电阻
- \( \omega_r \) 是转子机械角速度
- \( K_p \) 是变磁阻系数
- \( T_e \) 是电磁转矩
- MTPA控制原理
MTPA控制的目标是在固定的定子电流下,最大化输出转矩。通过对上述模型的分析,可以得出转矩与定子电流的关系:
永磁同步电机最大转矩电流比控制MTPA+弱磁控制MATLAB/simulink仿真模型,带有设计原理说明文档。 仿真模型已经调试好,可直接运行出波形,仿真波形完美无缺。
\[
Te = \frac{3}{2} p iq (\phif - (Rs - r) i_d)
\]
在给定 \( is \) 的情况下,优化 \( id \) 和 \( i_q \) 的比例,使其满足:
\[
iq = \sqrt{is^2 - i_d^2}
\]
从而获得最大的转矩 \( T_e \)。
- 弱磁控制原理
弱磁控制通过调节d轴电流,削弱磁链 \( \lambda_d \) 的大小,从而在高速运行时维持恒定的输出转矩。其调节关系为:
\[
id = \frac{\phif \sqrt{is^2 - id^2}}{R_s}
\]
三、仿真模型的建立
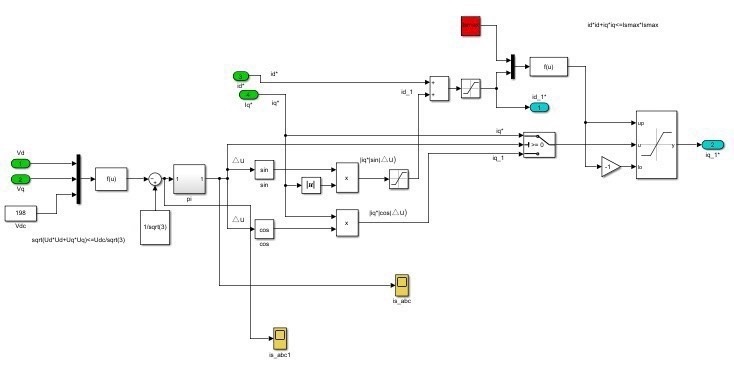
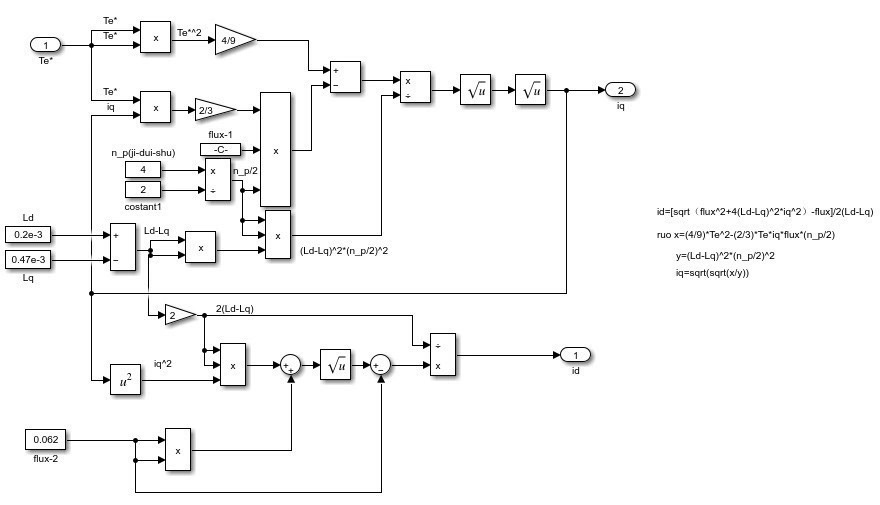
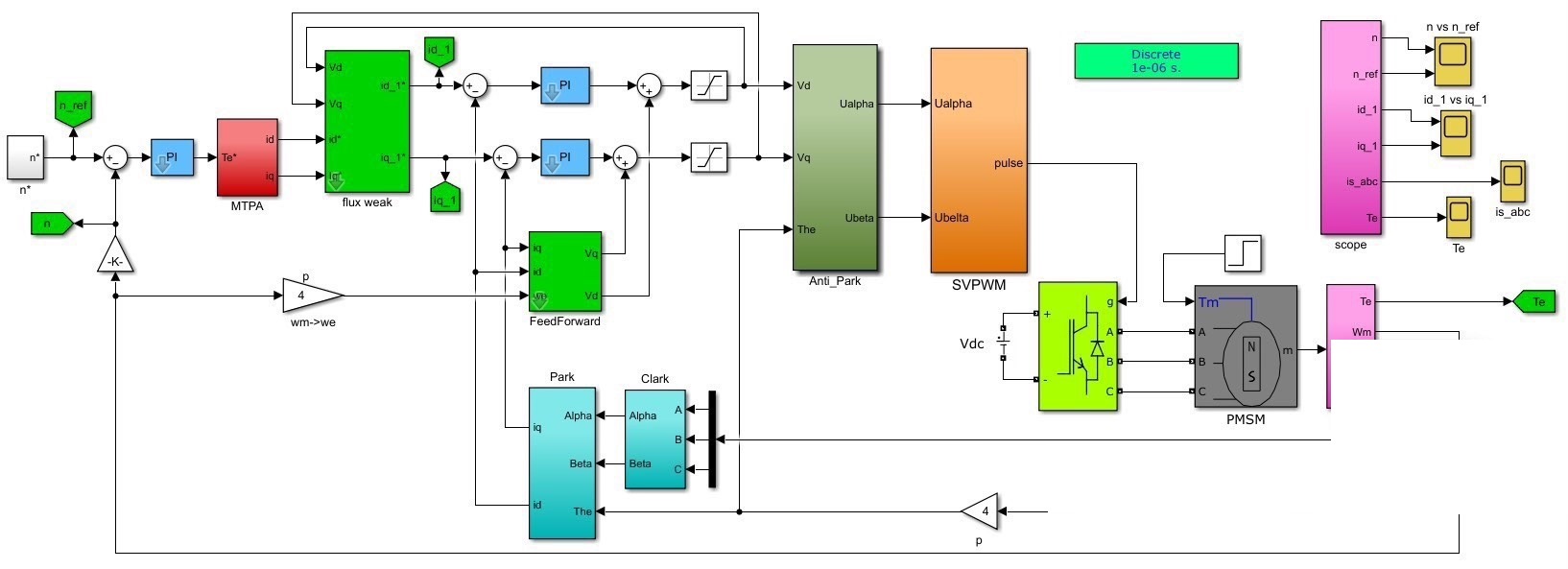
在MATLAB/Simulink中,可以通过搭建如图1所示的仿真模型,来实现PMSM的MTPA和弱磁控制。
- 搭建模型
使用Simulink中的电力系统工具箱( Simscape Electrical),可以方便地搭建永磁同步电机的仿真模型。主要模块包括:
- 永磁同步电机模块
- 矢量控制模块(包括MTPA和弱磁控制算法)
- 逆变器模块
- 电流和转速传感器模块
- 数据采集模块
- 控制策略实现
通过在Simulink中建立的控制模块,可以实现MTPA和弱磁控制策略。关键代码如下:
% 定义电机参数
Rs = 0.1; % 定子电阻
Ld = 0.005; % d轴电感
Lq = 0.004; % q轴电感
Phi_f = 0.1; % 永磁体磁链
p = 4; % 极对数
% MTPA控制
function [id_ref, iq_ref] = MTPA_Control(Is, T_set)
% 计算参考电流
if T_set ~= 0
cos_theta = sqrt((R_s * Is)^2 / (Phi_f^2 + (R_s * Is)^2));
sin_theta = Phi_f / sqrt(Phi_f^2 + (R_s * Is)^2);
iq_ref = sin_theta * Is;
id_ref = cos_theta * Is;
else
iq_ref = 0;
id_ref = 0;
end
end
% 弱磁控制
function [id_ref, iq_ref] = Flux_Weakening_control(Is, T_set, omega)
if omega > 0
iq_ref = (2 * T_set) / (3 * p * Phi_f);
id_ref = (Phi_f^2 / (R_s * Ld)) * (1 - (R_s^2 * Ld^2) / (Phi_f^2 * Lq^2)) / (Phi_f^2 + (R_s * Ld)^2 / (Lq^2));
else
iq_ref = 0;
id_ref = 0;
end
end- 参数设置
在Simulink模型中,需要设置以下参数:
- 定子电阻 \( R_s \)
- d轴和q轴电感 \( Ld \) 和 \( Lq \)
- 永磁体磁链 \( \Phi_f \)
- 极对数 \( p \)
- 转速和电流的参考值
四、仿真结果与分析
通过运行上述仿真模型,可以得到定子电流、转矩和转速的波形图,如图2所示。
- MTPA控制仿真结果
在低速运行状态下,MTPA控制能够迅速响应转矩的阶跃变化,维持输出转矩的稳定,同时优化电流的分配,达到最大的转矩电流比。仿真波形显示,电流和转矩的变化非常平滑,没有超调和震荡现象。
- 弱磁控制仿真结果
在高速运行状态下,弱磁控制能够有效调节磁链的大小,维持恒定的输出转矩。仿真波形显示,转速和转矩的变化非常平稳,电流调节快速响应,保证了系统的稳定性。
- 综合分析
通过上述仿真结果可以看出,MTPA和弱磁控制策略能够很好地协调电机在不同运行状态下的性能,确保系统的高效和稳定运行。
五、结论
本文通过MATLAB/Simulink仿真实现了永磁同步电机的MTPA和弱磁控制策略,验证了其在不同运行状态下的性能。仿真结果表明,该控制策略能够有效提高电机的运行效率和稳定性,为实际应用提供了有力的参考。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 3
3 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)