车辆稳定性相平面MATLAB程序绘制探索
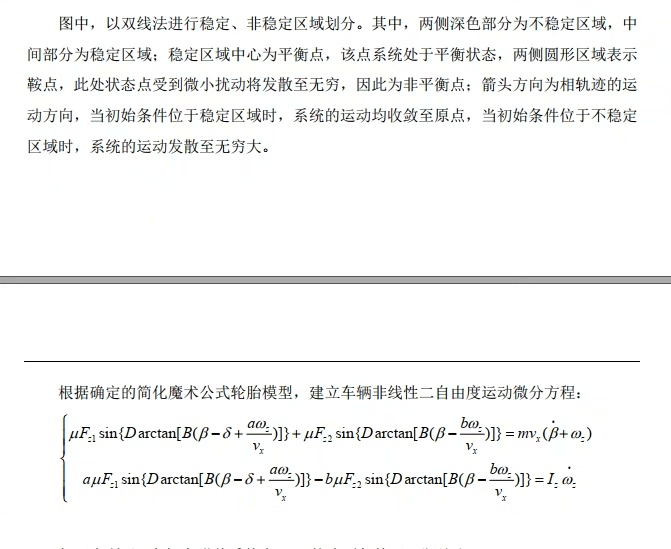
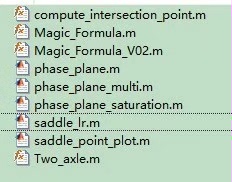
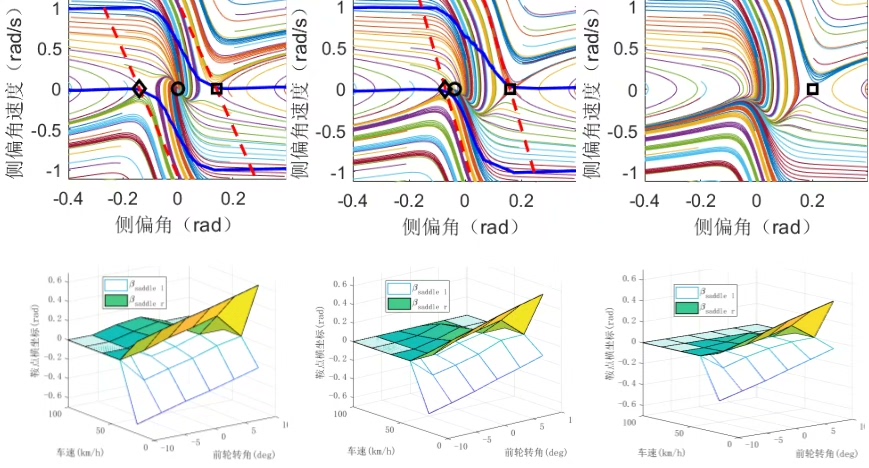
车辆稳定性相平面MATLAB程序绘制。 根据确定的简化魔术公式轮胎模型,建立车辆非线性二自由度运动微分方程,并进而对相平面图进行绘制。 包括横摆角速度与质心侧偏角的相平面,以及质心侧偏角速度与质心侧偏角的相平面。 具有Simulink和m脚本两种版本,而且可对稳定区域划分,鞍点位置与车速,路面附着系数的三维关系图等。 附赠送鞍点自动求取程序,盗版的没有这部分。
在车辆动力学研究领域,了解车辆的稳定性至关重要。今天咱们就来聊聊通过MATLAB程序绘制车辆稳定性相平面的那些事儿。我们将基于确定的简化魔术公式轮胎模型,构建车辆非线性二自由度运动微分方程,进而绘制相平面图。
基于简化魔术公式轮胎模型的运动方程构建
简化魔术公式轮胎模型能够较为准确地描述轮胎力与轮胎侧偏角之间的关系。基于此模型,我们可以推导出车辆非线性二自由度运动微分方程。以横摆角速度 $\dot{r}$ 和质心侧偏角 $\dot{\beta}$ 为变量,方程一般可表示为:
\[
\begin{cases}
m\cdot vy \cdot \dot{r} + m\cdot vx \cdot \dot{\beta} = F{yf} + F{yr} \\
Iz \cdot \dot{r} = lf \cdot F{yf} - lr \cdot F_{yr}
车辆稳定性相平面MATLAB程序绘制。 根据确定的简化魔术公式轮胎模型,建立车辆非线性二自由度运动微分方程,并进而对相平面图进行绘制。 包括横摆角速度与质心侧偏角的相平面,以及质心侧偏角速度与质心侧偏角的相平面。 具有Simulink和m脚本两种版本,而且可对稳定区域划分,鞍点位置与车速,路面附着系数的三维关系图等。 附赠送鞍点自动求取程序,盗版的没有这部分。
\end{cases}
\]
这里 $m$ 是车辆质量,$vx$ 和 $vy$ 分别是车辆纵向和横向速度,$F{yf}$ 和 $F{yr}$ 是前后轮侧向力,$lf$ 和 $lr$ 分别是质心到前后轴的距离,$I_z$ 是车辆绕 $z$ 轴的转动惯量。
相平面图绘制
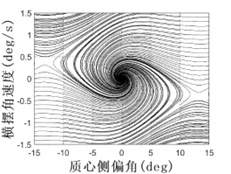
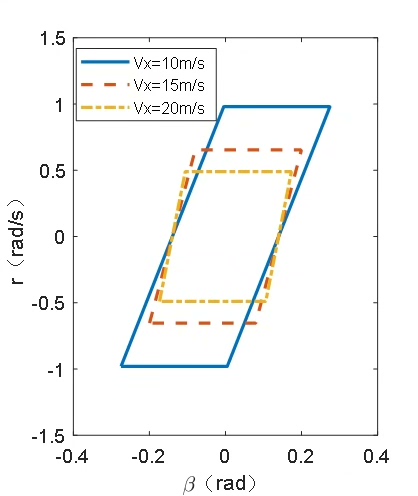
横摆角速度与质心侧偏角的相平面
通过求解上述运动微分方程,我们可以绘制横摆角速度与质心侧偏角的相平面。下面是一段简单的MATLAB m脚本代码示例:
% 参数设定
m = 1500; % 车辆质量 (kg)
Iz = 2500; % 转动惯量 (kg·m²)
lf = 1.2; % 质心到前轴距离 (m)
lr = 1.4; % 质心到后轴距离 (m)
% 其他参数设定,如路面附着系数等...
% 时间向量
tspan = 0:0.01:10;
% 初始条件
y0 = [0; 0];
% 求解微分方程
[t, y] = ode45(@(t,y) vehicle_equations(t,y,m,Iz,lf,lr), tspan, y0);
% 提取横摆角速度r和质心侧偏角beta
r = y(:,1);
beta = y(:,2);
% 绘制相平面
figure;
plot(beta, r);
xlabel('质心侧偏角 \beta (rad)');
ylabel('横摆角速度 r (rad/s)');
title('横摆角速度与质心侧偏角的相平面');在这段代码中,首先设定了车辆的基本参数,然后定义了时间向量和初始条件。通过 ode45 函数求解定义在 vehicleequations 函数中的微分方程(这里 vehicleequations 函数需自行按照前面的运动方程定义)。最后提取横摆角速度和质心侧偏角的值,绘制相平面图。
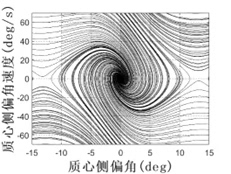
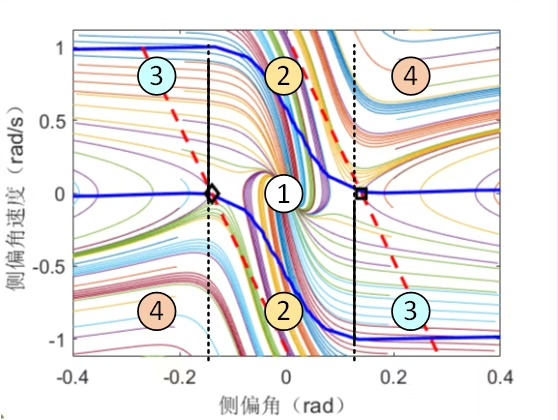
质心侧偏角速度与质心侧偏角的相平面
类似地,对于质心侧偏角速度与质心侧偏角的相平面绘制,代码逻辑相似,只是在微分方程求解和绘图变量提取上稍有不同。
% 质心侧偏角速度与质心侧偏角相平面绘制
% 参数设定不变
% 时间向量和初始条件
tspan = 0:0.01:10;
y0 = [0; 0];
% 求解微分方程(这里微分方程可能需稍作调整以获取质心侧偏角速度)
[t, y] = ode45(@(t,y) modified_vehicle_equations(t,y,m,Iz,lf,lr), tspan, y0);
% 提取质心侧偏角速度和质心侧偏角
beta_dot = y(:,1);
beta = y(:,2);
% 绘制相平面
figure;
plot(beta, beta_dot);
xlabel('质心侧偏角 \beta (rad)');
ylabel('质心侧偏角速度 \dot{\beta} (rad/s)');
title('质心侧偏角速度与质心侧偏角的相平面');这里假设 modifiedvehicleequations 函数是根据新的需求调整后的微分方程定义函数。
Simulink版本
除了m脚本,我们还可以利用Simulink搭建模型来实现同样的功能。在Simulink中,我们可以将运动微分方程通过各种模块搭建出来,比如积分模块、加法模块、乘法模块等,以模拟车辆的动力学行为。每个模块代表方程中的一部分运算,通过合理连接这些模块,就能完整地构建出车辆动力学模型。
稳定区域划分与鞍点相关内容
对于稳定区域划分,我们可以通过分析相平面上轨迹的行为来确定。如果轨迹趋向于某一平衡点,那么该平衡点附近区域就是稳定区域。而鞍点则是相平面上一种特殊的平衡点,其附近轨迹的行为较为复杂。
这里赠送鞍点自动求取程序,这可是咱们独有的,盗版可没有哦!
function [saddle_point] = find_saddle_point(m, Iz, lf, lr, mu, v)
% 定义函数句柄,这里根据运动方程构建关于横摆角速度r和质心侧偏角beta的函数
eqns = @(x) [m * v * x(2) + m * v * x(1) - tire_force(x(1), mu, lf) - tire_force(x(2), mu, lr);
Iz * x(2) - lf * tire_force(x(1), mu, lf) + lr * tire_force(x(2), mu, lr)];
% 使用fsolve函数求解鞍点,这里fsolve是MATLAB用于求解非线性方程组的函数
options = optimoptions('fsolve','Display','off');
initial_guess = [0; 0];
saddle_point = fsolve(eqns, initial_guess, options);
end
function force = tire_force(alpha, mu, l)
% 根据简化魔术公式轮胎模型计算轮胎力的函数示例
% 这里只是简单示意,实际需更精确的公式
force = mu * l * alpha;
end在这段代码中,findsaddlepoint 函数通过 fsolve 函数求解定义在 eqns 中的非线性方程组来获取鞍点。而 tire_force 函数则是简单示例如何根据简化魔术公式轮胎模型计算轮胎力。
通过绘制鞍点位置与车速,路面附着系数的三维关系图,我们能更直观地看到这些因素对车辆稳定性鞍点的影响。可以使用MATLAB的 surf 函数来实现此三维图绘制,代码如下:
% 车速范围
v = linspace(10, 30, 50);
% 路面附着系数范围
mu = linspace(0.2, 1, 30);
[V, MU] = meshgrid(v, mu);
SADDLE_POINT_R = zeros(size(V));
SADDLE_POINT_BETA = zeros(size(V));
for i = 1:size(V,1)
for j = 1:size(V,2)
[saddle_point] = find_saddle_point(m, Iz, lf, lr, MU(i,j), V(i,j));
SADDLE_POINT_R(i,j) = saddle_point(1);
SADDLE_POINT_BETA(i,j) = saddle_point(2);
end
end
figure;
surf(V, MU, SADDLE_POINT_R);
xlabel('车速 v (m/s)');
ylabel('路面附着系数 \mu');
zlabel('鞍点处横摆角速度 r (rad/s)');
title('鞍点处横摆角速度与车速、路面附着系数的关系');这段代码通过循环计算不同车速和路面附着系数下的鞍点横摆角速度值,然后利用 surf 函数绘制三维图。
以上就是关于车辆稳定性相平面MATLAB程序绘制的一些内容,希望能对研究车辆动力学稳定性的小伙伴们有所帮助!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 10
10 0
0- 0



 已为社区贡献49条内容
已为社区贡献49条内容

所有评论(0)