探索EMPC:显式模型预测控制的奇妙之旅
EMPC 显式模型预测控制 matlab 代码+文档 1.显式MPC控制器纵向控制 2.多参数二次规划显式MPC求解 3.弹簧系统的隐式和显式MPC控制
最近在研究控制领域的一些有趣内容,今天就来和大家分享下显式模型预测控制(EMPC),顺便带上MATLAB代码和相关文档说明,希望能给同样对此感兴趣的小伙伴一些启发。
显式MPC控制器纵向控制
在车辆控制等很多实际场景中,纵向控制是非常关键的一部分。显式MPC在纵向控制方面有着独特的优势。它通过建立精确的车辆动力学模型,预测车辆在未来多个时间步的状态,并通过优化算法来确定最优的控制输入。
来看一段简单的MATLAB代码示例(这里只是一个简化示意,实际应用会更复杂):
% 定义车辆模型参数
m = 1500; % 车辆质量
a = 2; % 车辆加速度限制
% 预测时域
N = 5;
% 状态变量
x = zeros(N+1,1); % 位置
v = zeros(N+1,1); % 速度
% 初始状态
x(1) = 0;
v(1) = 10;
% 优化变量
u = sdpvar(N,1); % 控制输入(加速度)
% 约束条件
cons = [];
for k = 1:N
% 运动学模型
x(k+1) == x(k) + v(k)*T + 0.5*u(k)*T^2;
v(k+1) == v(k) + u(k)*T;
% 控制输入约束
cons = [cons, -a <= u(k) <= a];
end
% 目标函数
cost = 0;
for k = 1:N
cost = cost + (x(k) - target_x(k))^2 + (v(k) - target_v(k))^2;
end
% 求解优化问题
ops = sdpsettings('solver','quadprog');
sol = optimize(cons,cost,ops);
% 提取最优控制输入
u_opt = value(u);在这段代码中,我们首先定义了车辆的一些基本参数,比如质量和加速度限制。然后设置了预测时域 N,这决定了我们向前预测几个时间步。状态变量 x 和 v 分别表示位置和速度,并且初始化了初始状态。
优化变量 u 就是我们要确定的控制输入(加速度)。通过运动学模型建立了状态转移的约束条件,同时限制了控制输入不能超过设定的加速度限制。目标函数 cost 则是根据期望的位置 targetx 和速度 targetv 来构建的,目的是让实际状态尽可能接近期望状态。最后通过 optimize 函数求解这个优化问题,得到最优的控制输入 u_opt。
多参数二次规划显式MPC求解
多参数二次规划(mp - QP)是求解显式MPC的重要方法。它能够将优化问题转化为参数化的二次规划问题,通过离线求解得到一个显式的反馈控制律。
EMPC 显式模型预测控制 matlab 代码+文档 1.显式MPC控制器纵向控制 2.多参数二次规划显式MPC求解 3.弹簧系统的隐式和显式MPC控制
在MATLAB中,我们可以借助一些优化工具箱来实现这一过程。以下是一个概念性的代码框架(实际使用可能需要根据具体问题调整和完善):
% 定义参数
p = sdpvar(n_p,1); % 参数向量
% 定义二次规划问题
H = eye(n); % 二次项系数矩阵
f = zeros(n,1); % 线性项系数向量
A = [1 -1; -1 1]; % 不等式约束矩阵
b = [1; 1]; % 不等式约束向量
% 构建mp - QP问题
mpqp_problem = mpqpsolver(H,f,A,b,p);
% 离线求解
sol = solvempqp(mpqp_problem);
% 根据当前参数值获取控制律
p_current = [0.5; 0.3]; % 当前参数值示例
u = getsolution(sol,p_current);在这个代码框架中,我们首先定义了参数向量 p。然后构建了二次规划问题的基本元素,包括二次项系数矩阵 H、线性项系数向量 f、不等式约束矩阵 A 和向量 b。通过 mpqpsolver 函数构建了多参数二次规划问题对象 mpqpproblem。接着离线求解这个问题得到 sol。最后,当有了当前的参数值 pcurrent 时,就可以通过 getsolution 函数获取相应的控制律 u。这种方式使得我们在在线运行时,能够快速根据当前参数确定控制输入,大大提高了控制的实时性。
弹簧系统的隐式和显式MPC控制
弹簧系统是一个经典的动力学系统,用来研究MPC控制非常合适。
隐式MPC控制
隐式MPC在每一个时间步都需要在线求解一个优化问题。以弹簧 - 质量系统为例,假设我们的目标是让质量块达到某个期望位置。
% 定义弹簧 - 质量系统参数
m = 1; % 质量
k = 10; % 弹簧刚度
% 预测时域
N = 10;
% 状态变量
x = sdpvar(N+1,1); % 位置
v = sdpvar(N+1,1); % 速度
% 控制输入
u = sdpvar(N,1); % 外力
% 初始状态
x0 = 0;
v0 = 0;
% 约束条件
cons = [x(1) == x0, v(1) == v0];
for k = 1:N
% 动力学模型
x(k+1) == x(k) + v(k)*T + 0.5*(u(k)/m - k/m*x(k))*T^2;
v(k+1) == v(k) + (u(k)/m - k/m*x(k))*T;
end
% 目标函数
cost = 0;
for k = 1:N
cost = cost + (x(k) - target_x)^2 + (v(k) - target_v)^2;
end
% 求解优化问题
ops = sdpsettings('solver','quadprog');
sol = optimize(cons,cost,ops);
% 提取控制输入
u_opt = value(u);在这个代码里,我们定义了弹簧 - 质量系统的质量 m 和弹簧刚度 k。同样设置了预测时域 N,状态变量 x 和 v 分别表示位置和速度,控制输入 u 是施加的外力。通过动力学模型建立了状态转移的约束条件,目标函数依旧是让系统状态接近期望的位置 targetx 和速度 targetv。每次运行时都要在线求解这个优化问题来获取控制输入 u_opt。
显式MPC控制
显式MPC则是通过离线计算,将优化问题的解表示为状态的显式函数。对于弹簧系统,这意味着我们可以提前计算好不同状态下的最优控制输入,在线运行时直接查询使用。
% 假设已经离线计算好显式控制律
% 以简单的线性函数近似举例(实际会更复杂)
function u = explicit_control(x,v)
u = -5*x - 3*v;
end
% 在线运行部分
x_current = 0.5;
v_current = 1;
u_opt = explicit_control(x_current,v_current);这里简单用一个线性函数来近似显式控制律(实际应用中需要通过复杂的多参数二次规划等方法精确计算)。在线运行时,只需要将当前的位置 xcurrent 和速度 vcurrent 代入这个显式控制律函数 explicitcontrol,就能快速得到最优控制输入 uopt,相比隐式MPC,大大减少了在线计算量。
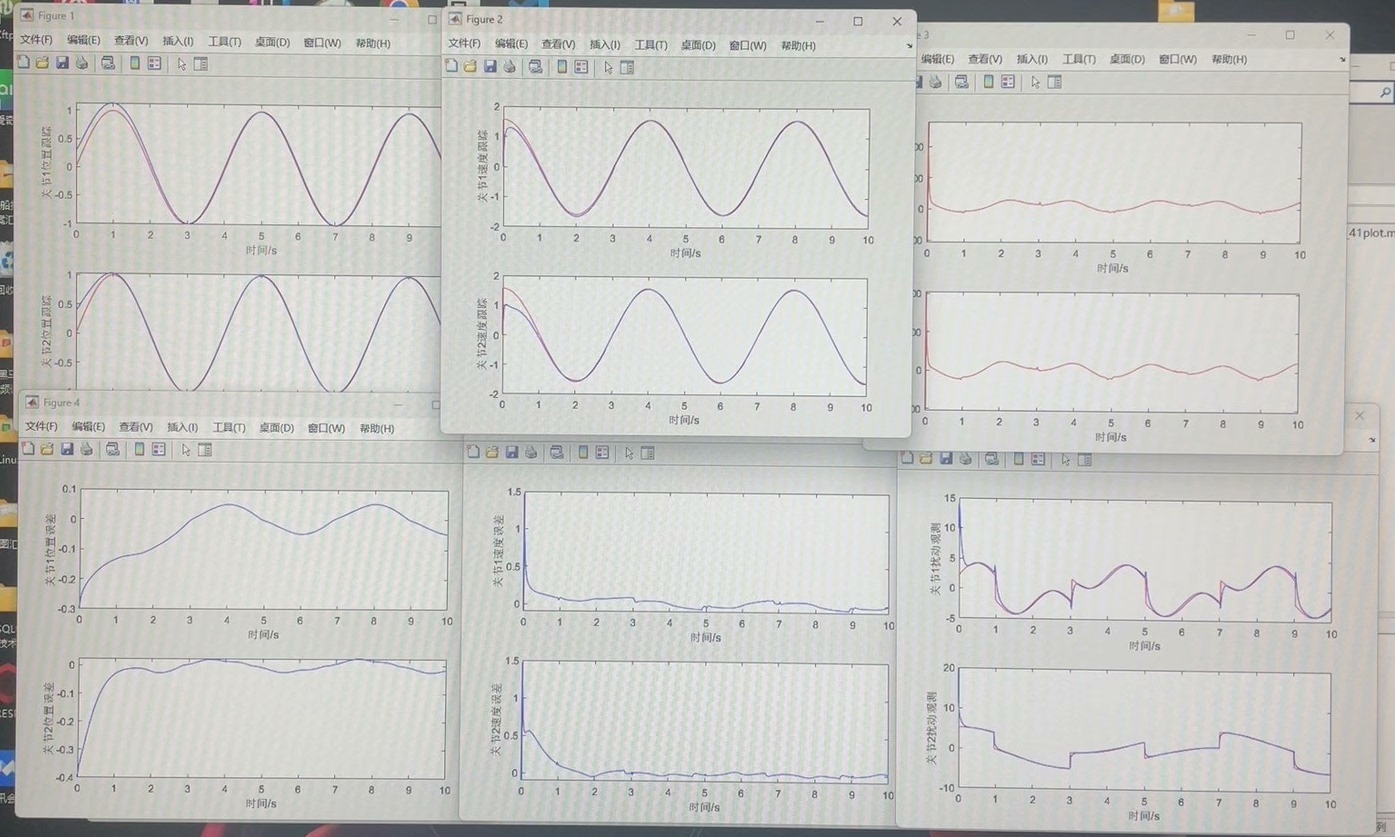
显式模型预测控制在很多实际应用场景中都展现出了强大的性能,无论是纵向控制、通过多参数二次规划求解,还是在弹簧系统这样的经典动力学系统控制上,都有着独特的优势和应用价值。希望今天分享的这些内容能让大家对EMPC有更深入的了解,一起在控制领域探索更多有趣的可能性。
以上代码和分析仅为帮助理解概念,实际应用需根据具体问题详细建模和优化。大家如果有任何问题或想法,欢迎在评论区交流。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 12
12 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)