用Carsim+Simulink搞懂ACC与主动避撞控制
18b基于模型预测控制(自带的mpc模块)和最优控制理论的Carsim与Matlab/simulink联合仿真实现汽车主动避撞和跟车功能(acc自适应巡航),包含simulink模型(其中有车辆逆纵向动力学模型、逆发动机模型、切换控制逻辑等),Carsim模型,资料。 (最好用Carsim2016版本及以上版本,模型不是很难,适合新手初步学习)
最近在折腾Carsim和Matlab联合仿真,想实现自适应巡航(ACC)和紧急避撞功能。这玩意儿看起来高大上,其实核心就是模型预测控制(MPC)和切换逻辑的配合。下面把我踩过的坑和关键实现逻辑捋一捋。
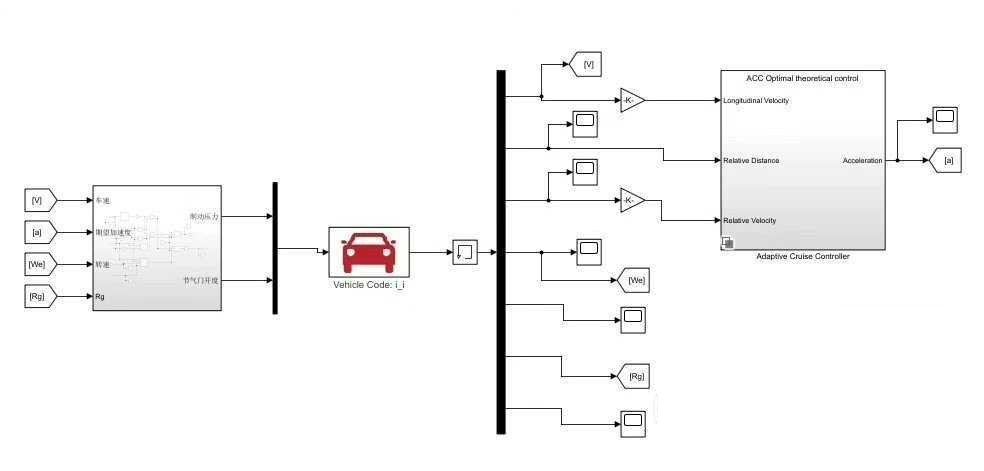
1. 模型搭建的"骨架"
整个系统的核心是纵向控制——既要跟前车保持安全距离,又要在突发情况下紧急制动。Simulink模型里最关键的三个模块:
% 逆纵向动力学模型核心计算(简化版)
function tau = inverse_longitudinal_model(v_des, a_des, current_v)
m = 1500; % 整车质量
f = 0.015; % 滚动阻力系数
g = 9.81;
tau = m*(a_des + f*g) + 0.5*1.225*2.5*(current_v)^2;
end这个逆模型负责把期望加速度转化为驱动力矩。注意里面的车速平方项——空气阻力在高速时影响巨大,实测80km/h以上不加上这个项,控制量会漂得亲妈都不认识。
2. MPC控制器的"灵魂"
Carsim输出本车与前车的相对距离、速度,作为MPC的输入参数。配置MPC模块时,权重矩阵的设置直接决定控制效果:
18b基于模型预测控制(自带的mpc模块)和最优控制理论的Carsim与Matlab/simulink联合仿真实现汽车主动避撞和跟车功能(acc自适应巡航),包含simulink模型(其中有车辆逆纵向动力学模型、逆发动机模型、切换控制逻辑等),Carsim模型,资料。 (最好用Carsim2016版本及以上版本,模型不是很难,适合新手初步学习)
新手容易把控制量权重设得太小,结果车辆加速时像打了鸡血,乘坐体验堪比过山车。建议先用默认参数跑基线,再慢慢调整。
3. 发动机逆模型的"玄学"
从驱动力矩到油门开度的转换,这里藏着魔鬼细节。实测不同转速区间,扭矩-油门关系曲线差异很大:
% 查表法实现发动机逆模型
throttle = interp1(engine_speed_map, torque_table, desired_torque, 'pchip');千万别用线性插值!特别是涡轮增压车型,在扭矩平台区用线性插值会导致油门突变。曾经因为这个问题,仿真时车辆在1800rpm附近疯狂抖动,活像得了帕金森。
4. 模式切换的"走钢丝"
正常跟车和紧急避撞的状态切换,比想象中脆弱得多。我的逻辑判断模块长这样:
Switch_Logic
├── Safe_Distance_Check // 基于TTC和距离的复合判断
├── Emergency_Flag // 碰撞时间<2秒时触发
└── ACC_Mode // 普通跟车模式重点在于切换时的控制量过渡。有次忘记加rate limiter,结果从ACC切到紧急制动时,油门瞬间归零导致Carsim报错——仿佛让正在跑步的人立刻劈叉。
5. 联合仿真的"姿势"
Carsim2016和Simulink的接口配置要注意:
- 车辆参数文件必须包含Engine_Map数据表
- 采样时间建议≤0.05s,否则紧急工况下会漏帧
- 记得勾选Carsim的Real-Time模块(虽然我们不做HIL)
第一次运行时如果报"S-function错误",八成是Carsim路径没设对。建议把工程文件和Carsim数据库放在同一个没有中文的路径下,比如D:\SimProjects\ACC_Demo
6. 调参的"血泪史"
- 前车急刹工况下,MPC的预测步长小于2秒等于自杀
- 成本函数中的距离误差权重需要随速度动态调整
- 制动系统延迟至少要设置0.3s的一阶惯性环节
- 跟车时距参数别照搬论文,实测1.8s比传统的2.5s更符合国内路况
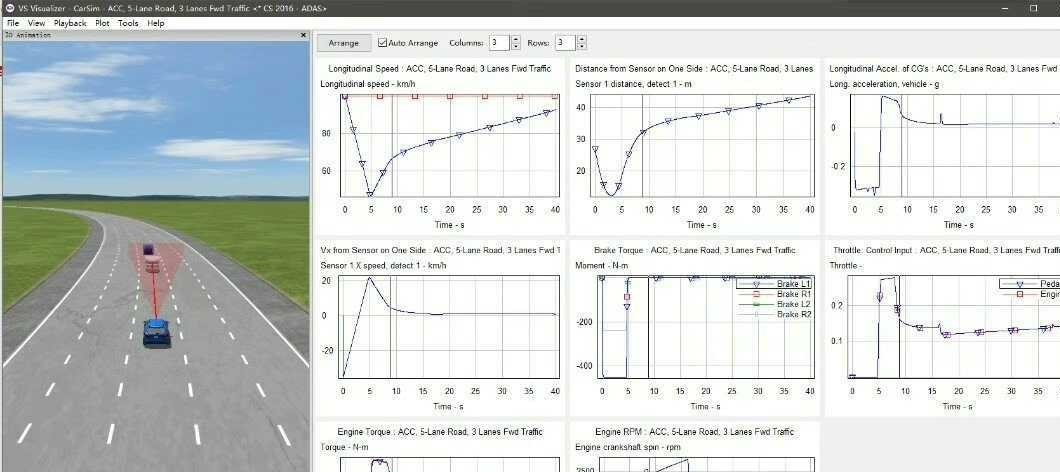
结语
把Carsim的车辆模型和Simulink的控制算法打通时,看着虚拟小车在紧急情况下自动绕开障碍物,那种成就感比通关游戏爽多了。完整工程文件已打包,包含8种典型测试场景,解压后记得先运行init_parameters.m。下回打算试试加入方向盘控制,搞个综合避撞策略。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)