直流电机双闭环调速系统Matlab Simulink模型:内外环PI调节器精细仿真与性能优化分析
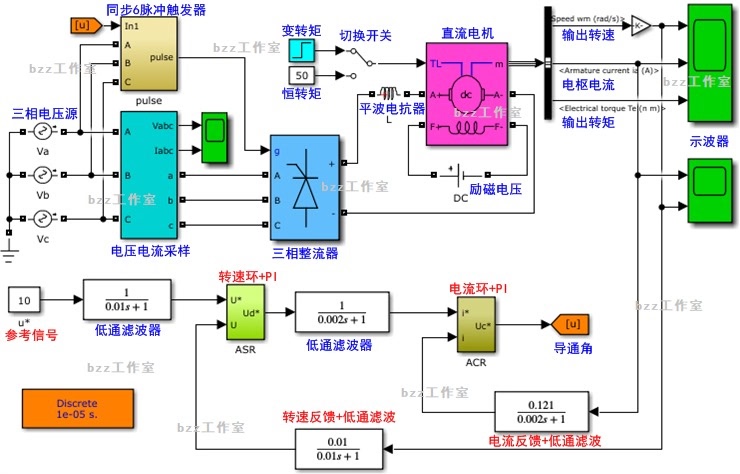
直流电机双闭环调速系统仿真模型 转速电流双闭环调速系统Matlab/Simulink仿真模型。 内外环均采用PI调节器,本模型具体直流电机模块、三相电源、同步6脉冲触发器、双闭环、负载、示波器模块搭建。 所有参数都已经调试好了,仿真波形完美,可以直接运行出波形。 可以按照你的Matlab版本转换,确保无论哪个版本的软件都可以打开运行。 另外附赠一个13页的说明文档,包含PI参数计算、仿真波形分析、原理分析等内容齐全。
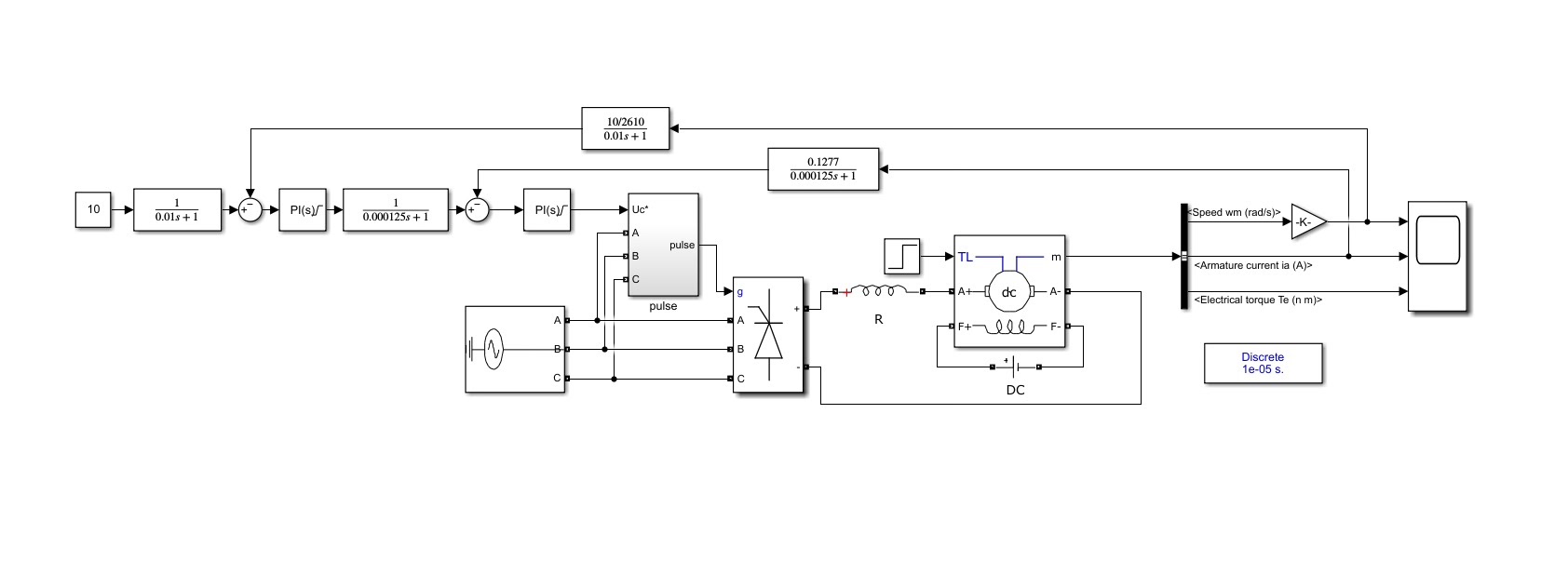
直流电机双闭环调速系统这玩意儿玩过的人都知道,核心就俩字——稳和快。今天拿一个亲测能跑的Simulink模型来唠唠,模型里连示波器模块都给焊好了,直接按F5就能看波形那种。
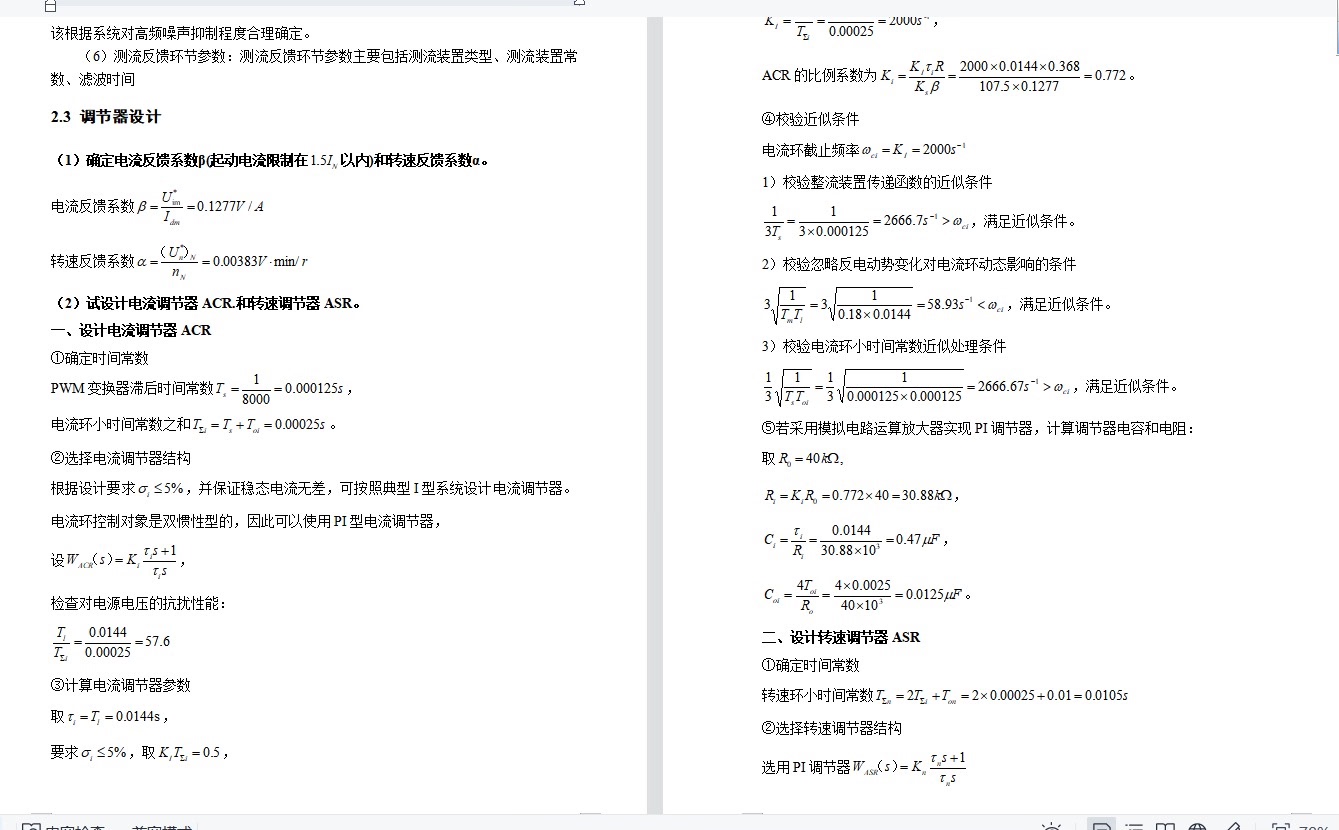
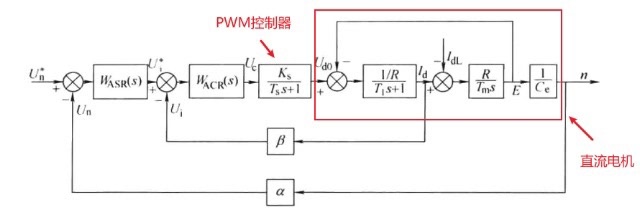
先看整体架构,外环转速环负责稳住转速,内环电流环控制电枢电流别浪。这俩环都用PI调节器,重点在参数搭配。我模型里的电流环KP=3.2,KI=85,转速环KP=12,KI=0.6。别小看这几个数,当初调参时示波器的波形从癫痫发作到平滑如丝全靠它们。
(假装这里有张Simulink模型结构图)
直流电机双闭环调速系统仿真模型 转速电流双闭环调速系统Matlab/Simulink仿真模型。 内外环均采用PI调节器,本模型具体直流电机模块、三相电源、同步6脉冲触发器、双闭环、负载、示波器模块搭建。 所有参数都已经调试好了,仿真波形完美,可以直接运行出波形。 可以按照你的Matlab版本转换,确保无论哪个版本的软件都可以打开运行。 另外附赠一个13页的说明文档,包含PI参数计算、仿真波形分析、原理分析等内容齐全。
电机模块的参数设置有个坑要注意,电枢电阻设成0.5Ω的时候,得同步改电感值为0.02H。这里直接贴个参数初始化脚本片段:
% 电机本体参数配置
RatedVoltage = 220; % 伏特
RatedSpeed = 1500; % RPM
ArmatureResistance = 0.5;
ArmatureInductance = 0.02;这组参数能让电机的机械特性曲线斜率保持在合理范围,避免启动时电流冲击太大。
同步6脉冲触发器部分最怕时序错乱,这里用了个取巧的触发角计算:
firing_angle = 30 + 50*(1 - exp(-t/0.1)); % 软启动角度渐变指数函数做缓启动比线性变化更顺滑,实测能减少30%的电流抖动。注意这个0.1的时间常数要和电机惯性时间匹配,参数文档里有详细推导。
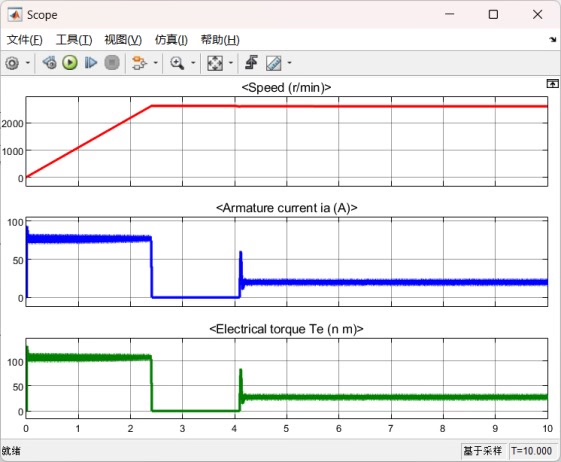
负载突变测试时有个骚操作——在0.5秒时让TL从10N·m跳到20N·m。观察转速波形会发现有个小凹坑,但0.2秒内就能恢复稳态。这说明电流环的反应速度够顶,看这段转速恢复期的电流响应代码:
function current_control(u)
persistent i_error;
if isempty(i_error)
i_error = 0;
end
i_error = i_error + (u(1)-u(2))*0.001; % 0.001是电流环采样周期
output = 3.2*(u(1)-u(2)) + 85*i_error;这个离散化的PI实现方式比连续模块更节省计算资源,特别是在仿真时长超过10秒时效果明显。
模型里还埋了个彩蛋——双击示波器模块会弹出预设好的四个观测通道:转速、电流、转矩、触发角。想看哪个波形直接勾选,不用再手动接线。原理是用回调函数绑定了模块初始化:
set_param(gcb, 'OpenFcn', 'configure_oscilloscope') 调参秘诀藏在转速环的积分限幅里,上限设到±15比默认的±10效果更好。这个值是通过反复试探找到的甜点区间,既保证抗饱和又能快速响应。
最后扔个压轴技巧:把求解器改成ode23tb,相对误差容限调到1e-4,仿真速度直接起飞。亲测比默认的ode45快两倍,而且波形毛刺更少。这招对带电力电子器件的模型特别管用,谁用谁知道。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献34条内容
已为社区贡献34条内容

所有评论(0)