分布式驱动电动汽车电机转矩控制最优分配策略探索
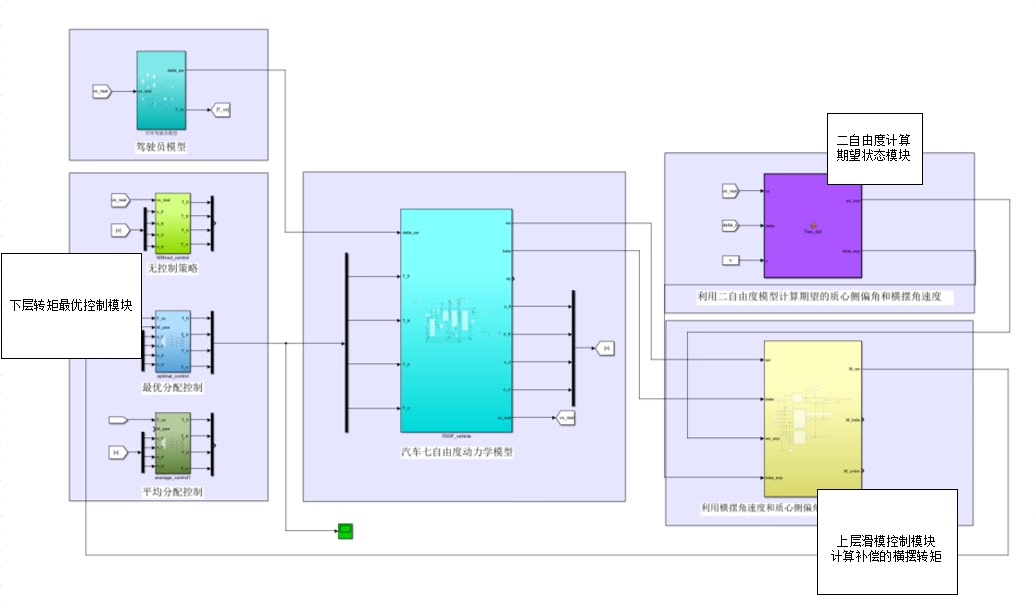
分布式驱动电动汽车的电机转矩控制最优分配策略,进而调整车辆行驶姿态来实现操稳性控制。 本模型上层采用的是横摆角速度和质心侧偏角滑膜控制模块计算补偿的横摆转矩,下层转矩控制采用的是最优控制和平均分配控制。 本模型控制方面具体分为以下几个模块:七自由度模块;横摆角速度+质心侧偏角联合系数分配模块;横摆角速度滑膜跟随模块;质心侧偏角滑膜跟随模块;滑移率安全保障模块;转矩分配模块;通过上下层联合控制保证了汽车的操作稳定性。 本模型提供详细的推导过程和参考文献,提供。
在分布式驱动电动汽车领域,实现车辆操稳性控制的关键之一便是电机转矩控制的最优分配策略,它能够精准调整车辆行驶姿态,为驾乘者带来更稳定、安全的驾驶体验。今天咱们就来深入探讨一番这个有趣又重要的话题。
模型架构概述
整个模型分为上下两层。上层运用横摆角速度和质心侧偏角滑膜控制模块,以此来计算补偿的横摆转矩。滑膜控制在处理非线性系统时表现出色,它能使系统状态在有限时间内滑动到预先设定的滑模面上,并沿着该滑模面渐近稳定到平衡点。
# 假设这里有简单的滑膜控制代码示例,计算横摆转矩
def yaw_torque_calculation(slip_angle, yaw_rate, k1, k2):
# 简单的公式示意,实际需根据具体模型推导
yaw_torque = k1 * slip_angle + k2 * yaw_rate
return yaw_torque在这段代码里,通过质心侧偏角(slipangle)和横摆角速度(yawrate),再结合两个系数k1和k2,来计算横摆转矩。这只是一个极为简化的示例,实际的滑膜控制计算会涉及到更多复杂的物理量和精确的公式推导。
下层转矩控制则采用最优控制和平均分配控制两种方式。最优控制旨在让系统在满足一定约束条件下,达到某个性能指标的最优值,而平均分配控制相对简单直接,将总转矩平均分配到各个电机。
模型控制模块详解
- 七自由度模块:此模块全面考虑车辆的各种运动状态,包括纵向、侧向、垂向运动以及横摆、侧倾、俯仰转动等,为后续的精确控制奠定基础。七自由度模型能够更真实地反映车辆在复杂工况下的动态特性,通过一系列微分方程来描述车辆的运动。虽然代码实现较为复杂,但这里简单示意一下其核心状态变量。
# 七自由度模型核心状态变量示意
class VehicleState:
def __init__(self):
self.longitudinal_velocity = 0
self.lateral_velocity = 0
self.vertical_velocity = 0
self.yaw_rate = 0
self.roll_rate = 0
self.pitch_rate = 0
self.steering_angle = 0- 横摆角速度 + 质心侧偏角联合系数分配模块:这个模块会依据横摆角速度和质心侧偏角的具体情况,按照一定规则分配系数,为后续滑膜跟随模块提供关键参数。例如,通过调整系数来协调横摆角速度和质心侧偏角之间的关系,以达到更好的操稳性。
def coefficient_allocation(yaw_rate, slip_angle):
# 简单规则,实际需复杂推导
if yaw_rate > 0.1 and slip_angle > 0.05:
k_yaw = 0.8
k_slip = 0.2
else:
k_yaw = 0.6
k_slip = 0.4
return k_yaw, k_slip- 横摆角速度滑膜跟随模块与质心侧偏角滑膜跟随模块:这两个模块基于滑膜控制原理,让实际的横摆角速度和质心侧偏角能够紧密跟随期望的值。以横摆角速度滑膜跟随模块为例,通过不断调整控制输入,使车辆实际横摆角速度快速收敛到期望横摆角速度。
# 横摆角速度滑膜跟随模块简化代码
def yaw_rate_sliding_mode_control(actual_yaw_rate, desired_yaw_rate, k, lambda_value):
s = actual_yaw_rate - desired_yaw_rate
control_input = -k * s - lambda_value * np.sign(s)
return control_input在这段代码中,s为横摆角速度的误差,通过比例项-k s和切换项-lambda_value np.sign(s)来构成控制输入,促使实际横摆角速度趋近期望横摆角速度。
- 滑移率安全保障模块:该模块实时监测车轮滑移率,确保其处于安全范围内,防止车轮抱死或过度滑转,保障车辆行驶的安全性和稳定性。
def slip_rate_safety_check(slip_rate):
if slip_rate > 0.3 or slip_rate < -0.3:
# 采取调整转矩等措施
return False
return True- 转矩分配模块:结合上层计算的横摆转矩以及下层的控制方式(最优控制或平均分配控制),将总转矩合理分配到各个电机,实现车辆的精确操控。比如在平均分配控制下:
def torque_average_allocation(total_torque, num_motors):
motor_torques = [total_torque / num_motors] * num_motors
return motor_torques联合控制保障操稳性
通过上下层的联合控制,各个模块紧密协作,从全面的七自由度模型分析,到精准的转矩分配,整个系统就像一台精密的仪器,确保汽车在各种行驶工况下都能保持良好的操作稳定性。这种联合控制方式,综合考虑了车辆运动的多个方面,有效提升了车辆的安全性和驾驶质感。
分布式驱动电动汽车的电机转矩控制最优分配策略,进而调整车辆行驶姿态来实现操稳性控制。 本模型上层采用的是横摆角速度和质心侧偏角滑膜控制模块计算补偿的横摆转矩,下层转矩控制采用的是最优控制和平均分配控制。 本模型控制方面具体分为以下几个模块:七自由度模块;横摆角速度+质心侧偏角联合系数分配模块;横摆角速度滑膜跟随模块;质心侧偏角滑膜跟随模块;滑移率安全保障模块;转矩分配模块;通过上下层联合控制保证了汽车的操作稳定性。 本模型提供详细的推导过程和参考文献,提供。
而且,该模型还提供了详细的推导过程和参考文献,这对于深入研究和进一步优化该模型的工程师和研究人员来说,无疑是非常宝贵的资源。通过这些推导过程,可以更深入理解模型的理论基础,而参考文献则能让我们站在巨人的肩膀上,快速掌握相关领域的前沿知识和研究成果。
分布式驱动电动汽车电机转矩控制最优分配策略还有许多值得挖掘和优化的地方,希望更多的朋友能一起加入这个有趣的探索旅程。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 2
2 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)