探索汽车防抱死ABS模型:Simulink构建与控制策略剖析
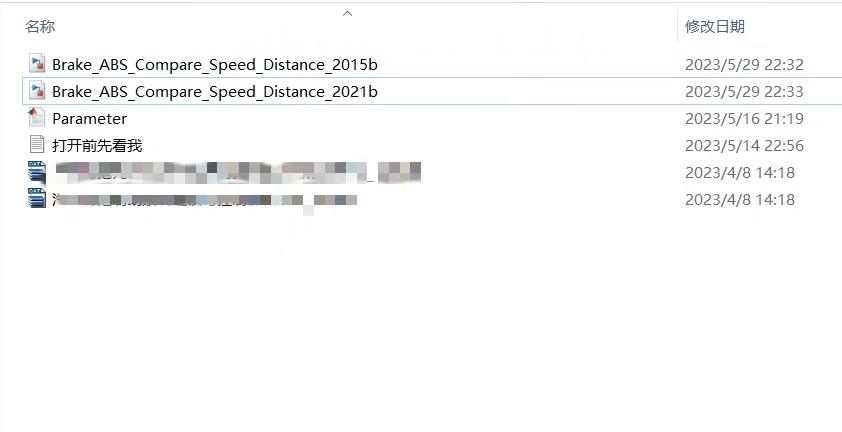
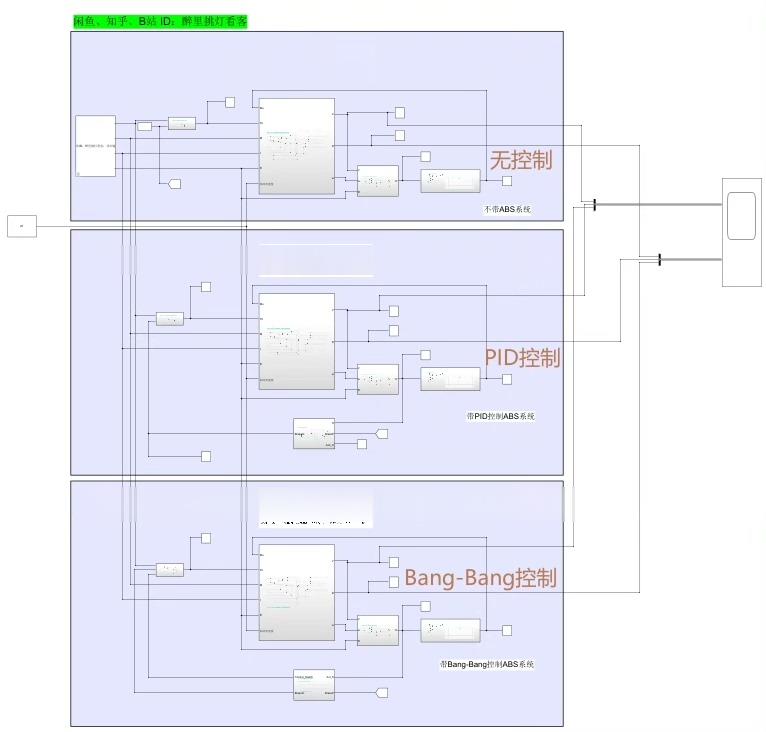
汽车防抱死 ABS模型,单轮汽车防抱死simulink模型。 图六本人头像。 模型包括有轮胎模型,简化的汽车模型,ABS控制模型。 其中控制模型分成三种类型仿真,包括有 无控制,PID控制,BangBang控制三种仿真对比。 如下图: 图一:为模型总体概览图 图二:卖品包含的文件 图三:仿真不同控制方法下的制动距离和车速。 图四:不同控制模式下的滑移率曲线。 图五:轮胎模型特性曲线
在汽车安全领域,防抱死制动系统(ABS)堪称一项革命性技术。今天咱就来深入聊聊基于单轮汽车的防抱死Simulink模型。
模型构成剖析
这个ABS模型主要由轮胎模型、简化的汽车模型以及ABS控制模型这三大核心部分组成。
轮胎模型
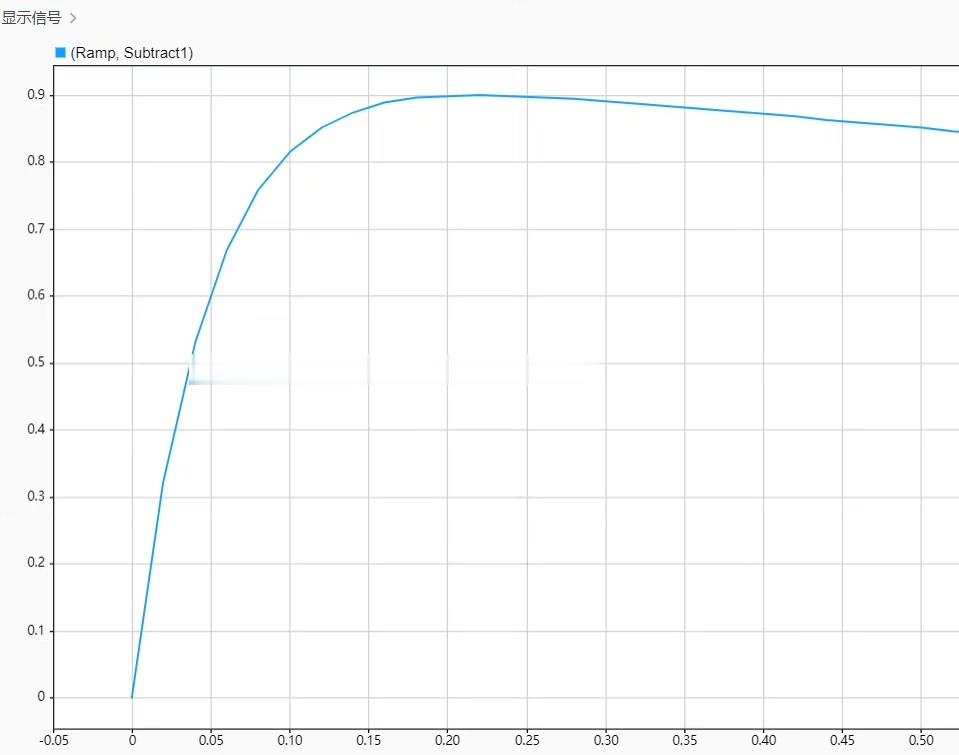
轮胎模型对于整个ABS系统的模拟起着关键作用,它关乎着车辆与地面的摩擦力等关键特性。轮胎与地面之间的力决定了车辆的制动效果和行驶稳定性。比如,在Simulink中,轮胎模型特性曲线(图五)可以直观展示出轮胎力随着滑移率等参数的变化情况。通过代码来简单示意下其在Simulink中的构建思路(这里仅为示意,非完整代码):
% 假设我们定义轮胎力与滑移率的关系函数
function tireForce = tireModel(slipRatio)
% 简单的线性关系示意,实际更复杂
tireForce = 100 * slipRatio;
end这段代码模拟了轮胎力与滑移率之间的一种简单关系,在实际的轮胎模型中,会涉及到更复杂的物理公式和参数来精确模拟不同工况下的轮胎特性。
简化的汽车模型
简化的汽车模型则抽象出了汽车的关键动力学特性,比如质量、速度等参数。它是整个系统模拟车辆运动状态的基础。我们可以通过如下代码片段来构建一个极其简化的汽车速度更新模型:
% 假设车辆质量m,初始速度v0,受到的力F
m = 1000; % 单位:kg
v0 = 20; % 初始速度,单位:m/s
F = -5000; % 假设的制动力,负号表示与运动方向相反
% 速度更新公式:v = v0 + F/m * dt
dt = 0.01; % 时间步长
v = v0 + F/m * dt;这只是一个超级简化的示例,实际的汽车模型会综合考虑更多因素,比如车辆的转动惯量、空气阻力等,以更精确地模拟汽车的运动。
ABS控制模型
ABS控制模型是整个系统的大脑,它决定了如何根据车辆的实时状态调整制动力,以达到防止车轮抱死的目的。这里我们有三种不同的控制模式进行仿真对比:无控制、PID控制和Bang - Bang控制。
无控制模式
无控制模式下,就相当于车辆没有ABS系统,制动力按照常规的方式施加,车轮很容易抱死。在Simulink模型中,这就是一个简单的直接施加固定制动力的模块。这种模式可以作为一个对比基准,用来凸显ABS控制的优势。
PID控制模式
PID控制是一种经典的反馈控制策略。在ABS系统中,PID控制器根据车轮的实际速度与期望速度的偏差,通过比例(P)、积分(I)、微分(D)三个环节来调整制动力。在Simulink中搭建PID控制器相对直观,其核心代码原理如下:
% 假设设定速度setPoint,当前速度currentSpeed
setPoint = 10; % 单位:m/s
currentSpeed = 8;
error = setPoint - currentSpeed;
% 假设比例系数Kp,积分系数Ki,微分系数Kd
Kp = 0.5;
Ki = 0.1;
Kd = 0.05;
% 积分项和微分项初始化
integral = 0;
derivative = 0;
% PID控制计算
integral = integral + error * dt;
derivative = (error - prevError) / dt;
controlOutput = Kp * error + Ki * integral + Kd * derivative;
prevError = error;这段代码展示了PID控制在计算控制输出时的基本步骤,通过不断调整控制输出,使得车轮速度尽可能接近设定速度,避免抱死。
Bang - Bang控制模式
Bang - Bang控制相对较为简单直接,它只有两个控制状态,比如最大制动力和最小制动力。当车轮速度偏差超过一定阈值时,施加最大制动力,当偏差小于一定阈值时,施加最小制动力。以下是一个简单的示意代码:
% 假设设定速度setPoint,当前速度currentSpeed
setPoint = 10;
currentSpeed = 8;
error = setPoint - currentSpeed;
threshold = 1;
if abs(error) > threshold
brakeForce = 10000; % 最大制动力
else
brakeForce = 1000; % 最小制动力
end通过这样的控制逻辑,在车轮速度偏差较大时大力制动,偏差较小时减小制动力,防止车轮抱死。
仿真结果解读
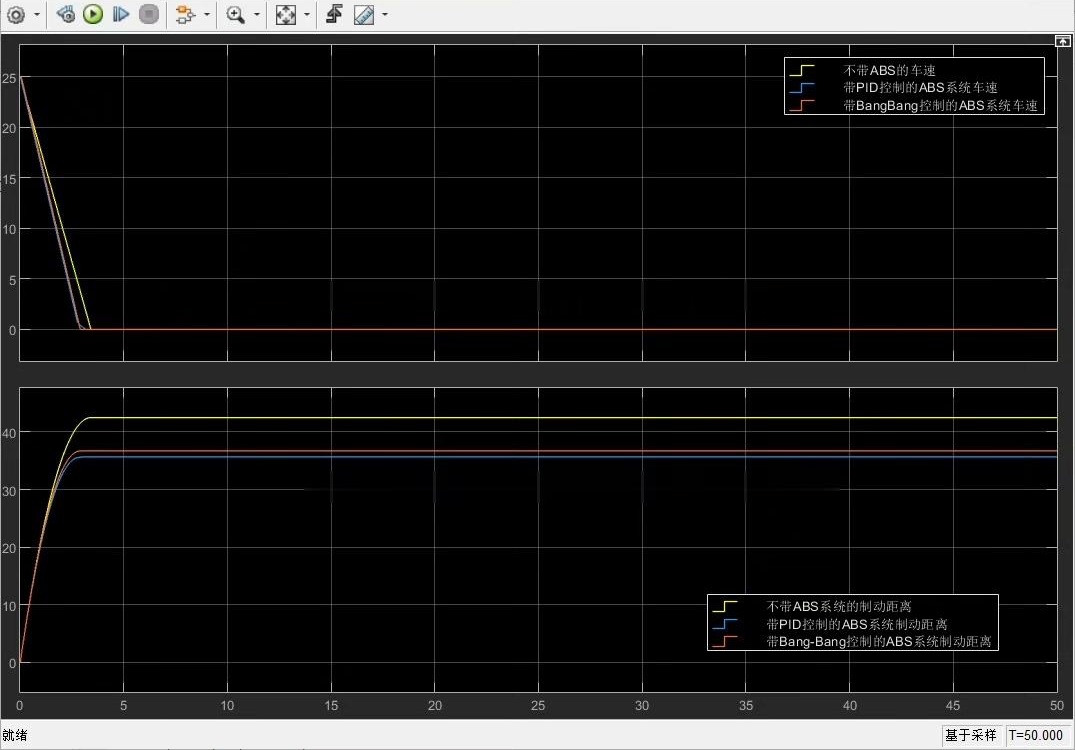
从图三仿真不同控制方法下的制动距离和车速可以清晰看出,无控制模式下,车辆制动距离较长且车轮容易抱死导致车速急剧下降不稳定;而PID控制和Bang - Bang控制模式下,制动距离明显缩短,车速变化更为平稳。
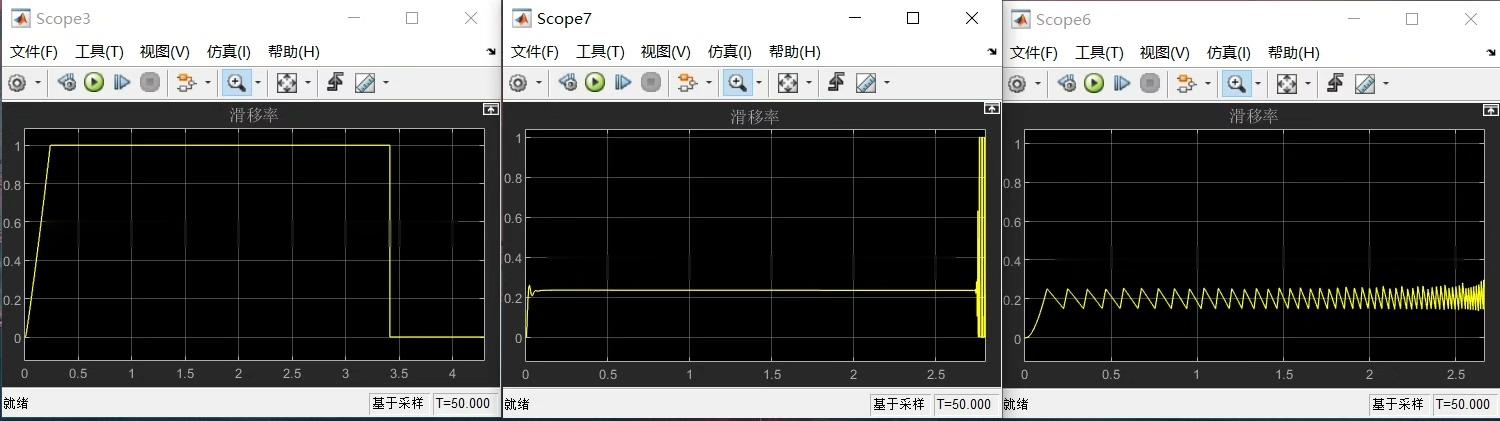
图四则展示了不同控制模式下的滑移率曲线。滑移率是衡量车轮是否接近抱死的关键指标,合理的控制应该将滑移率维持在一个合适的范围内。PID控制和Bang - Bang控制在这方面都展现出了比无控制模式更好的性能,能有效地将滑移率控制在相对理想区间,避免车轮抱死。
汽车防抱死 ABS模型,单轮汽车防抱死simulink模型。 图六本人头像。 模型包括有轮胎模型,简化的汽车模型,ABS控制模型。 其中控制模型分成三种类型仿真,包括有 无控制,PID控制,BangBang控制三种仿真对比。 如下图: 图一:为模型总体概览图 图二:卖品包含的文件 图三:仿真不同控制方法下的制动距离和车速。 图四:不同控制模式下的滑移率曲线。 图五:轮胎模型特性曲线
通过对这个单轮汽车防抱死Simulink模型的深入分析,我们可以更清楚地了解ABS系统不同控制策略的原理和效果,为进一步优化汽车制动安全性能提供有力的理论和实践基础。
(图六本人头像,由于无法实际展示,这里仅提及)
希望这篇博文能让大家对汽车防抱死ABS模型有更深入的认识!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)