永磁同步电机矢量控制C代码分享:从项目到实践的无缝对接
永磁同步电机矢量控制C代码,全部从项目中总结得到,采用的S-function模式仿真,与实际项目运行基本一致,可以直接复制代码移植到工程实践项目中去。
在电机控制领域,永磁同步电机(PMSM)凭借其高效、节能等优点,应用越来越广泛。而矢量控制技术则是实现PMSM高性能控制的关键。今天,就和大家分享一套从实际项目中总结出来的永磁同步电机矢量控制C代码,并且这套代码采用S - function模式仿真,与实际项目运行基本一致,可直接复制移植到工程实践项目中。
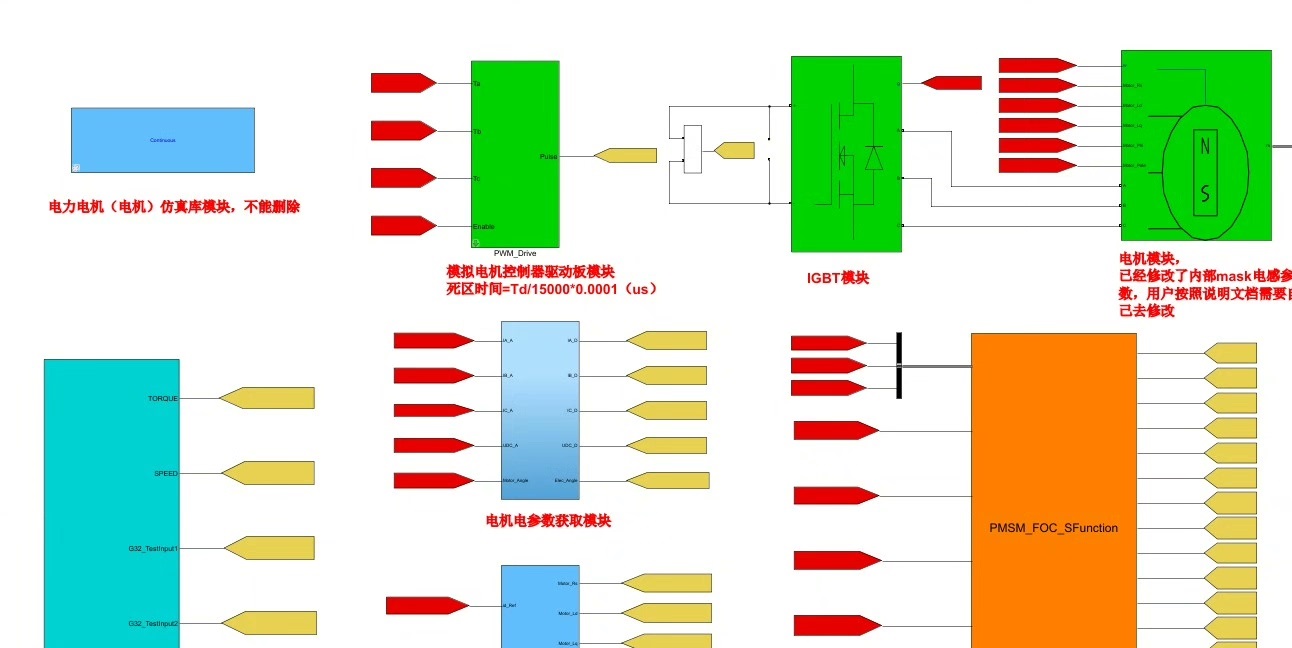
S - function模式仿真简介
S - function(System function)是MATLAB/Simulink提供的一种功能强大的建立动态系统模型和编写仿真程序的工具。通过S - function,我们可以使用C、C++、Fortran等语言编写自定义的模块,从而实现复杂的控制算法。这种模式使得我们在仿真阶段就能对实际项目中使用的代码进行验证和优化,大大提高了从理论到实践的转换效率。
永磁同步电机矢量控制原理简述
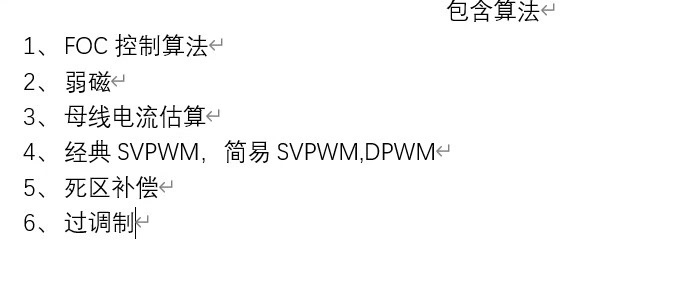
永磁同步电机矢量控制的核心思想是通过坐标变换,将电机的三相定子电流分解为励磁电流分量和转矩电流分量,分别进行独立控制,就如同控制直流电机一样,从而实现对电机转矩和磁通的解耦控制。主要涉及到Clark变换、Park变换及其逆变换等数学变换。
Clark变换
将三相静止坐标系下的电流($ia, ib, i_c$)变换到两相静止坐标系($\alpha, \beta$)下,公式如下:
\[
\begin{bmatrix}
i_{\alpha} \\
i_{\beta}
\end{bmatrix}
=
\sqrt{\frac{2}{3}}
\begin{bmatrix}
1 & -\frac{1}{2} & -\frac{1}{2} \\
0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2}
\end{bmatrix}
\begin{bmatrix}
i_a \\
i_b \\
i_c
\end{bmatrix}
\]
永磁同步电机矢量控制C代码,全部从项目中总结得到,采用的S-function模式仿真,与实际项目运行基本一致,可以直接复制代码移植到工程实践项目中去。
下面是对应的C代码实现:
void clark_transformation(float ia, float ib, float ic, float *ialpha, float *ibeta) {
*ialpha = sqrt(2.0f / 3.0f) * (ia - 0.5f * ib - 0.5f * ic);
*ibeta = sqrt(2.0f / 3.0f) * (sqrt(3.0f) / 2.0f * (ib - ic));
}这段代码接收三相电流ia、ib、ic,通过上述公式计算出ialpha和ibeta,并通过指针返回结果。
Park变换
将两相静止坐标系($\alpha, \beta$)下的电流变换到两相旋转坐标系($d, q$)下,公式如下:
\[
\begin{bmatrix}
i_d \\
i_q
\end{bmatrix}
=
\begin{bmatrix}
\cos\theta & \sin\theta \\
-\sin\theta & \cos\theta
\end{bmatrix}
\begin{bmatrix}
i_{\alpha} \\
i_{\beta}
\end{bmatrix}
\]
其中$\theta$为转子位置角。C代码实现如下:
void park_transformation(float ialpha, float ibeta, float theta, float *id, float *iq) {
float cos_theta = cos(theta);
float sin_theta = sin(theta);
*id = cos_theta * ialpha + sin_theta * ibeta;
*iq = -sin_theta * ialpha + cos_theta * ibeta;
}代码中,首先计算出costheta和sintheta,然后根据Park变换公式计算出id和iq。
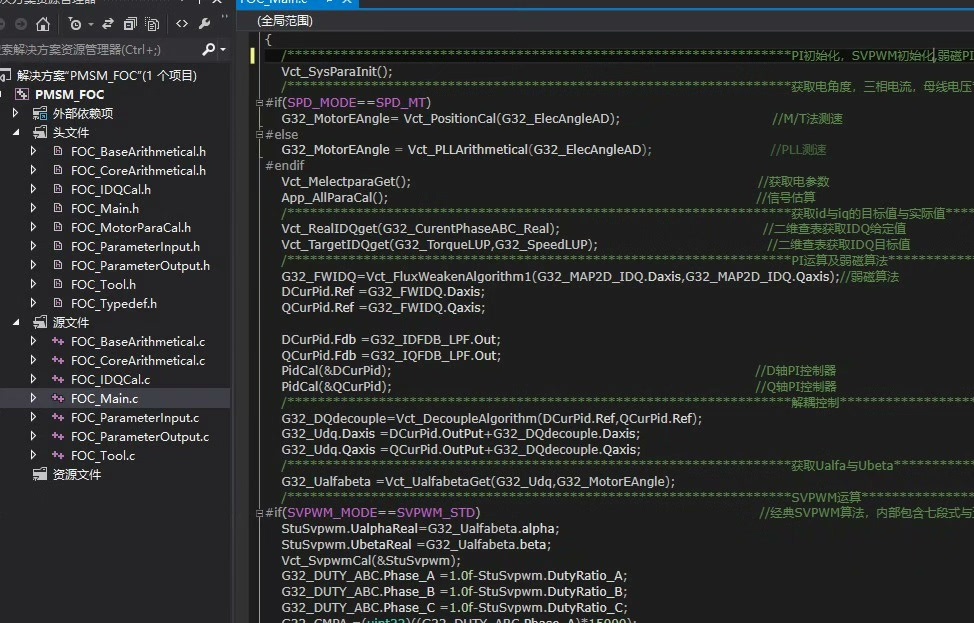
完整代码结构及关键部分
整个永磁同步电机矢量控制的C代码项目包含多个模块,如初始化模块、坐标变换模块、PI控制模块以及S - function接口模块等。
初始化模块
void pmsm_vector_control_init(void) {
// 初始化一些控制参数,例如PI调节器的参数
// 设定电机的额定参数,如额定电压、额定电流等
// 初始化转子位置角等状态变量
float kp_speed = 0.5f;
float ki_speed = 0.1f;
float rated_voltage = 311.0f;
float rated_current = 10.0f;
float theta = 0.0f;
}在初始化模块中,对控制算法中用到的各种参数进行初始化设定,为后续的控制过程做好准备。
PI控制模块
float pi_controller(float ref, float feedback, float *integral, float kp, float ki) {
float error = ref - feedback;
*integral += error;
float output = kp * error + ki * *integral;
return output;
}PI控制模块用于实现速度环和电流环的控制。它接收给定值ref和反馈值feedback,通过比例系数kp和积分系数ki计算出控制输出。这里的integral是积分项,每次计算时都会更新,以实现积分控制的效果。
代码移植到工程实践项目
由于这套代码采用S - function模式仿真,在经过仿真验证后,移植到实际工程实践项目中相对轻松。只需要根据目标硬件平台的特点,进行一些必要的修改,如硬件接口配置、数据类型适配等。例如,如果目标平台是一款特定的微控制器,可能需要根据其ADC接口的特性来修改采集三相电流的代码部分;根据PWM输出模块的特点来修改控制信号输出部分的代码。
总之,这套永磁同步电机矢量控制C代码,通过S - function模式仿真验证,为实际工程应用提供了一个可靠的起点,希望对大家在电机控制项目中有所帮助。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 5
5 0
0- 0



 已为社区贡献51条内容
已为社区贡献51条内容

所有评论(0)