基于脉振高频电压信号注入法的PMSM无位置传感器控制仿真探索
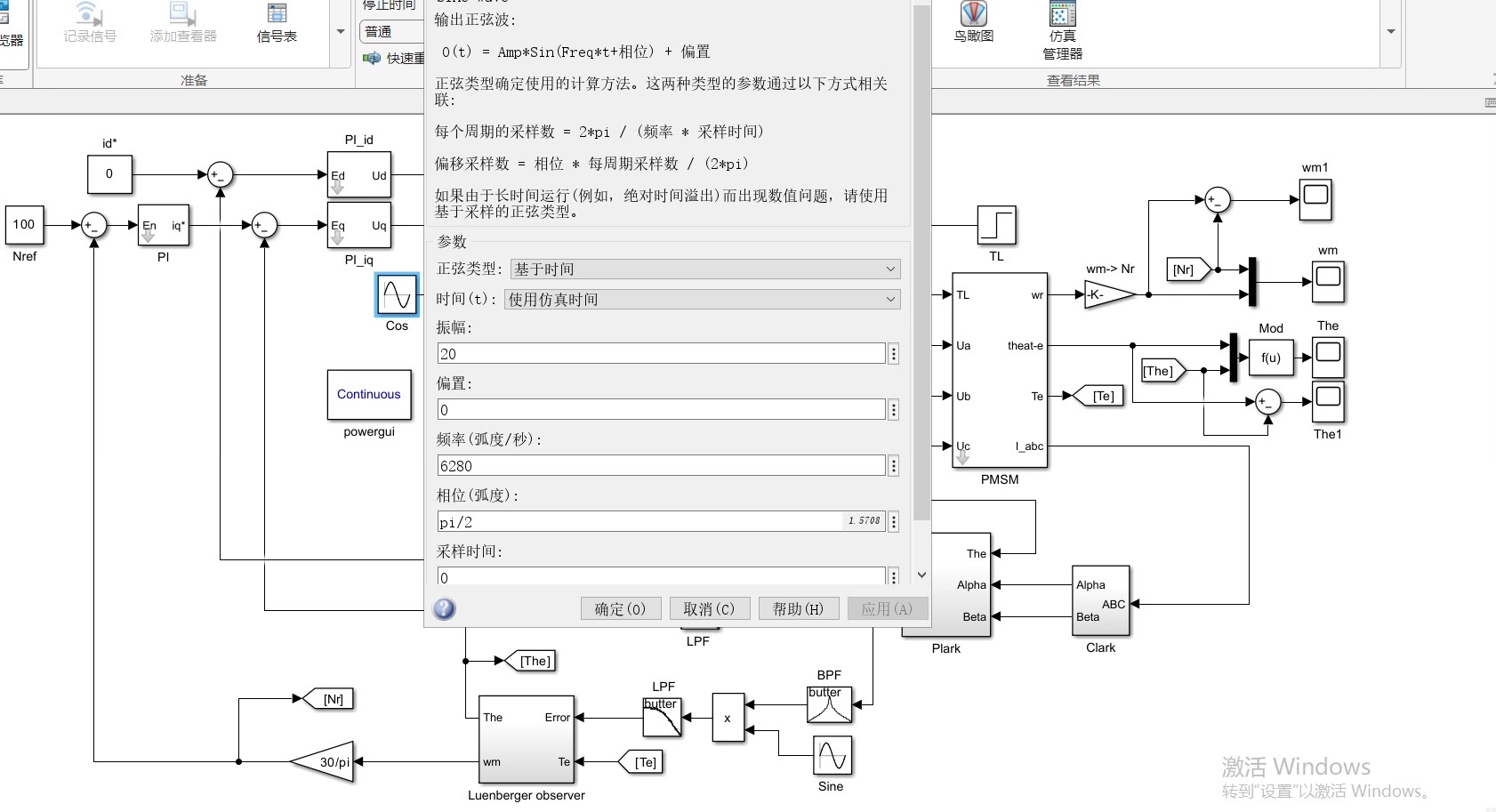
基于脉振高频电压信号注入法的永磁同步电机(PMSM)无位置传感器控制仿真,解决低速启动转子位置误差较大的问题。 根据袁雷《现代永磁同步电机控制原理及MAtlab》一书搭建。 模型中的PMSM为根据转矩,磁链,电压方程搭建,自带的模型相比更加符合实际。
在永磁同步电机(PMSM)的控制领域,无位置传感器控制技术一直是研究热点。特别是在低速启动时,转子位置误差较大的问题,犹如一座横亘在工程师面前的大山,亟待翻越。今天就来聊聊基于脉振高频电压信号注入法的PMSM无位置传感器控制仿真,看看是如何巧妙解决这个难题的。
我们这次的仿真模型搭建参考了袁雷的《现代永磁同步电机控制原理及MAtlab》一书。这本书就像一本武林秘籍,为我们提供了扎实的理论和实践指导。
PMSM模型搭建
通常,我们搭建的PMSM模型是基于转矩、磁链、电压方程来构建的。与那些自带的模型相比,这种基于方程搭建的模型更贴近实际运行情况。
比如在Matlab/Simulink环境下搭建模型时,我们需要依据这些方程来编写代码实现相应的功能。以电压方程为例,假设三相静止坐标系下的电压方程为:
\[
\begin{cases}
u{a} = R{s}i{a} + \frac{d\psi{a}}{dt} \\
u{b} = R{s}i{b} + \frac{d\psi{b}}{dt} \\
基于脉振高频电压信号注入法的永磁同步电机(PMSM)无位置传感器控制仿真,解决低速启动转子位置误差较大的问题。 根据袁雷《现代永磁同步电机控制原理及MAtlab》一书搭建。 模型中的PMSM为根据转矩,磁链,电压方程搭建,自带的模型相比更加符合实际。
u{c} = R{s}i{c} + \frac{d\psi{c}}{dt}
\end{cases}
\]
在Matlab代码实现时,可能会像下面这样:
% 设定电机参数
Rs = 1; % 定子电阻
% 假设已经获取了电流ia,ib,ic和磁链psi_a,psi_b,psi_c
% 计算电压
ua = Rs * ia + diff(psi_a)/dt;
ub = Rs * ib + diff(psi_b)/dt;
uc = Rs * ic + diff(psi_c)/dt;这里简单的代码片段,就是依据电压方程来计算三相电压。通过这样的方式,逐步构建起整个PMSM模型,让它更真实地模拟电机在实际运行中的各种特性。
脉振高频电压信号注入法原理及实现
脉振高频电压信号注入法是解决低速启动转子位置误差问题的关键。其核心原理是向电机注入高频脉振电压信号,然后通过对电机响应信号的分析来获取转子位置信息。
在代码实现上,我们先来看注入高频信号部分:
% 高频信号参数
omega_hf = 2*pi*1000; % 高频信号角频率,1000Hz
A_hf = 10; % 高频信号幅值
t = 0:0.00001:1; % 时间向量
v_hf = A_hf * sin(omega_hf * t); % 生成高频脉振电压信号
% 将高频信号注入到电机模型相应位置
% 假设电机模型有一个端口可以接收注入信号
motor_model.input = v_hf;上述代码生成了一个幅值为10V,频率为1000Hz的高频脉振电压信号,并将其注入到电机模型中。
接着,对于获取电机响应信号并分析转子位置的部分,这部分相对复杂一些,涉及到信号处理等知识。简单来说,就是从电机输出信号中提取出与高频信号相关的分量,再通过特定算法计算出转子位置。
解决低速启动转子位置误差较大问题
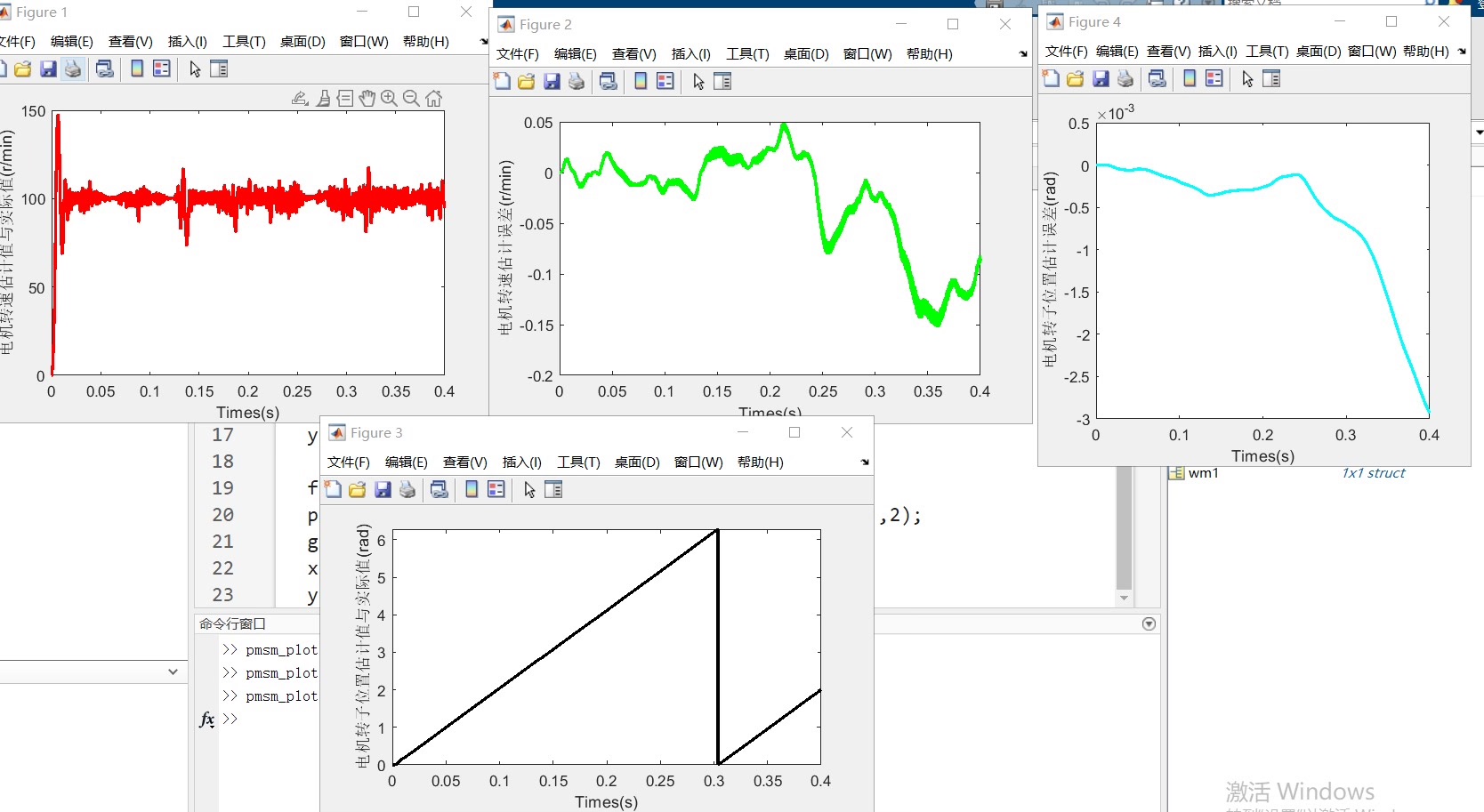
通过脉振高频电压信号注入法,我们在低速启动时,能够更精准地获取转子位置信息。这就好比给电机装上了一双“眼睛”,让它在低速运行时也能“看清”自己的位置。
从仿真结果来看,采用这种方法后,低速启动时转子位置误差明显减小。以往那种因为位置误差大导致电机启动不稳定、转矩波动大的情况得到了显著改善。这不仅提升了电机的启动性能,也为其在各种对启动要求较高的应用场景中奠定了良好基础。
总之,基于脉振高频电压信号注入法的PMSM无位置传感器控制仿真,通过精心搭建的PMSM模型和巧妙的信号注入与处理方法,成功攻克了低速启动转子位置误差较大的难题,为PMSM的高效、稳定运行开辟了新的道路。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)