模型预测控制专题(五)—— Model-free 的一篇review论文
今天看一篇综述Model-Free Predictive Control of Motor Drives: A Review;最近Model-free挺火的,学习一下具体这个控制方法有什么优势。
原文:This article aims to reveal the current state of MFPC strategies for motor drives and give the categorization from the perspective of implementation.
这也是这篇文章的关键贡献啊,给出了MFPC的研究现状,并且从实施的角度进行分类。期待一下这篇文章的质量。
文章指出,Model-free 被分为两个重要的分支,一个分支是通过补偿理想模型未考虑的量,一个分支是建立无系统参数的预测模型。
One is to compensate for output prediction errors arising from the utilization of an idealized system model.The other is to establish the prediction model without system parameters, so that the control variables are directly predict via the MFPC methods
并且指出了模型预测控制比较关键的问题——参数依赖性问题,原文是这样的:一种具有强参数鲁棒性的模型预测控制(MPC)在实际应用中是很有需求的。需要考虑两个方面。一是无模型控制,这意味着系统中的控制器设计无需被控对象模型的任何信息。另一个是无模型运行,即参数变化不再影响控制性能。
Such a MPC with strong parameter robustness is desired for practical applications. Two folds should be taken into consideration. One is the model-free control, which means that the controller in system is designed without any information of the plant model. The other is the model-free operation, namely the parameter variations no longer affect the control performance. In this sense, the MFPC poses a concern.
然后对MFPC进行了分类:
第一类:离线电压矢量+电流变化率表格;
第一种模型预测电流控制(MFPC)保留了理想系统模型的位置,同时增加了估计和补偿环节来处理估计误差和扰动误差。通过这种方式,模型失配的影响在很大程度上得以降低。通常,相应的补偿在控制输入处或预测输出值处进行反馈。前一种情况通常主要针对空间矢量调制,其中参考电压被视为控制输入。后一种情况则更适用于模型预测控制(MPC)。这种方案总体是基于电流误差与不同电压矢量之间的关系决定的。如下所示:
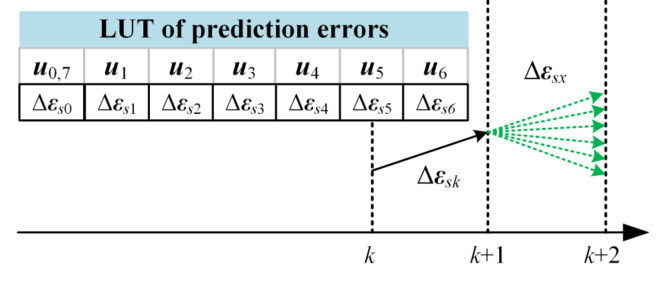
我们传统意义上的模型预测控制通常是通过电压平衡方程的离散模型进行一阶或者二阶离散化得到预测电流。如下式所示:

在这篇文章中,他认为后面这一长串——电流变化率和电压矢量之间是对应的关系。在采样周期固定、电压矢量独立运行于一个载波周期时,这个对应关系确实时成立的。因此预测控制不再基于离散化方程计算下一拍电流,而是基于在线存储的这个表格进行预测下一拍电流。
文章点出了这个方案的缺点:1、表格无法做到实施精确影响控制性能。2、此类方法仍然属于有模型的范畴,无法实现无模型设计。
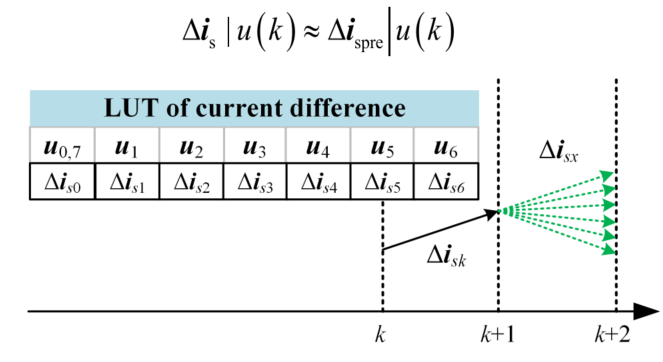
第二类:在线电压矢量+电流变化率表格;
上面第一种方案把电流误差存储在表格之中,这种方法是在线一直测试;结合过采样技术或者多点采样,在一个载波周期内获得电流误差值,这个误差值被认为是电流变化大小与电压矢量之间的相关值,可以认为是一种梯度。基于此关系,在线更新表格,然后进行电压矢量寻优。
第三类:基于超局部模型+观测器方案
这种方案区分了电压矢量作用下电流变化率,以及集总扰动所带来的电流变化率。如下所示。F被认为是集总扰动,在下面的公式中集总扰动被定义为电阻分压以及反电势分压。
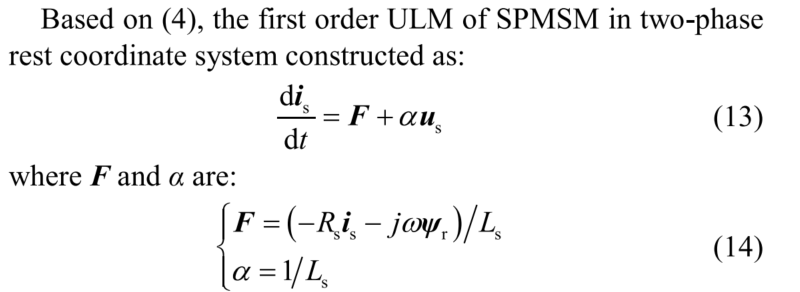
这个思路是比较新颖的,它将传统电压平衡方程拆分,使得电机电感模型部分被单独讨论,电阻分压以及非线性耦合部分被视为总体的扰动被讨论;分别考虑这两个部分从而达到电流最终控制效果。预测方程如下所示:
![]()
这种方案仍然是基于一定的电机参数的,最起码基于了电机电阻和电感值;
第四类:超局部模型 + 外生变量自回归算法 方案
原英文:MFPC based on ARX Model (ARX = autoregressive with exogenous variable)
在模型方面,开发了超局部模型(ULM)和带外生变量的自回归(ARX)模型用于未来状态预测。这个方案最显著的特点就是将电机模型视为一个黑箱,不再将其视为任何白盒模型,不去解析其内部结构,而是从外部变量的角度分析其控制规律,基于此规律得到预测值和控制值。
ARX在这个过程中起到扰动观测器的作用,为了描述这个扰动观测器,状态变量被分为测量的部分以及不可测量部分,如下所示:

通常,通过干扰观测器增强的预测模型将会有上面这个式子的结构;除非一个额外的项目被引入到干扰过程中。为了实施调节并且处理这个额外的项目,下列结构被应用;
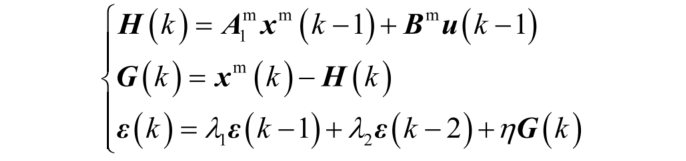
仔细分析这个公式可以发现,这其实类似一个最小二乘法,存在一个迭代加和的过程。其中lambda1 和 lambda2 分别对应 前一拍、前两拍的干扰影响因子,决定了他们的占比;而 ita 代表系统状态和预测状态之间的差值,xm(k+1)通过 k拍的状态变量、输入量、扰动量之间的关系计算得到;H(k) 实际上等于 xm(k) - Am2*xu(k)。
通过推导可以得到最终的 xm(k+1)的估计值,如下所示:
![]()
在整个控制过程中,ARX预测系统状态的基础只有历史系统数据,而不是系统的物理模型,所以系统的参数鲁棒性会进一步的增强。然后,这个方法目前存在非常大的计算负担。其中如何计算黑盒的输出、计算各历史量的系数、计算代价函数都是较为消耗MCU算力的。
方法对比的相关阐述与波形:
方案1利用控制系统的输入和输出来补偿预测误差或参考电压矢量。它需要被控对象的标称参数,因此它并非完全无参数控制。基于特定动态模型的未来状态预测使它们能够维持较好的稳态性能。
方案2 摒弃了被控对象的数学模型,保留了无模型设计与运行的优点。此外,它计算负担小且参数调整少。然而,这类 MFPC 通常会遇到数据更新停滞的问题,导致电流谐波增加。
方案3 构建了一个用于预测的通用线性模型,该模型由控制系统的输入和输出数据推导得出。这里无需查找表(LUTs),避免了数据更新停滞的问题。但是,ULM 参数的估计增加了系统的计算负担和调整工作量。(其实这种方案仍然需要复杂的调参过程,alpha参数的影响很大,包括系统的动态及稳态性能,它的输出性能类似PI调节器)
方案4 将整个控制系统视为一个黑箱,通过递归计算系统输出来替代对不可测量信息的估计。整个过程导致了最高的计算负载。对比结果如下图所示:
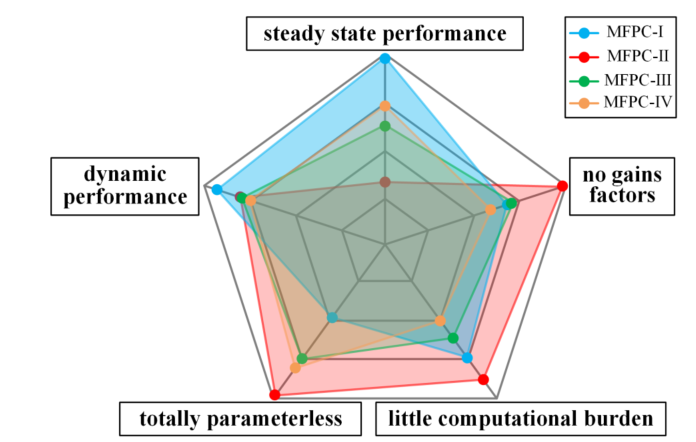
可以看到各个方法各有优势和劣势,只是从参数鲁棒性的角度考虑,其中最具有参数鲁棒性的方法是方案二,然而这种方案的稳态性能最差;参数鲁棒性排第二的则是黑箱方案,但是这种方案的计算复杂度最大,实施过程存在问题;参数鲁棒性排第三的是第三种方案,超局部模型方案,这种方案性能较为均衡,没有比较明显的劣势,但是也没有突出的优势;第一种方案的参数鲁棒性最低,因为表格中的变化率是通过电机参数计算的,因此在电机参数发生变化时,这个表格不一定准确。
研究指导与展望
文章的展望主要集中在MFPC在低开关频率的应用,指出低开关频率在基波周期有限电压矢量应用的局限性,以及谐波电流大等特殊性。并且指出了MFPC与具有参数鲁棒性的sensorless control 方法的结合方向。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 21
21 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)