利用PMU测量进行电力系统状态估计的探索
电力系统状态估计是根据在少数母线上进行的测量来估计电力系统中所有母线的状态(电压幅值和角度)的过程。 早期的测量设备只能提供测量数量的大小。 但现在,一种叫做相量测量单元(PMU)的高效测量设备正在使用,它可以测量母线的电压相量(大小和角度)以及直接连接线路的电流相量。 由于PMU非常昂贵,因此不能仅使用PMU测量来估计电力系统的状态。 因此,相量测量被用作传统测量的附加测量,以估计电力系统的状态。 在本本文中,解释了使用PMU测量来估计电力系统的状态,编写了Matlab程序,并在IEEE-14总线和IEEE-30总线系统上进行了仿真,以验证该方法。 该方法使用单独的线性状态估计器模型,该模型利用来自WLS的状态估计以及通过后处理的PMU电压和电流测量。 首先,该模型使用传统测量的WLS状态估计方法估计极坐标中的状态。 然后,该状态和PMU测量值(均以直角坐标表示)用于估计系统的最终状态。
在电力系统的运行管理中,状态估计是一项关键任务。简单来说,电力系统状态估计就是依据在少数母线上开展的测量,来推算出整个电力系统中所有母线的状态,这里的状态主要指电压幅值和角度 。
早期的时候,测量设备功能有限,仅能给出测量数量的大小。不过,时代在进步,如今一种极为高效的测量设备——相量测量单元(PMU)登上了舞台。它可厉害啦,不仅能测量母线的电压相量(包含大小和角度),还能测量直接连接线路的电流相量 。
但PMU有个小缺点,那就是价格昂贵,所以仅靠PMU测量来估计电力系统的状态不太现实。于是,相量测量就作为传统测量的补充手段,用于电力系统状态估计。
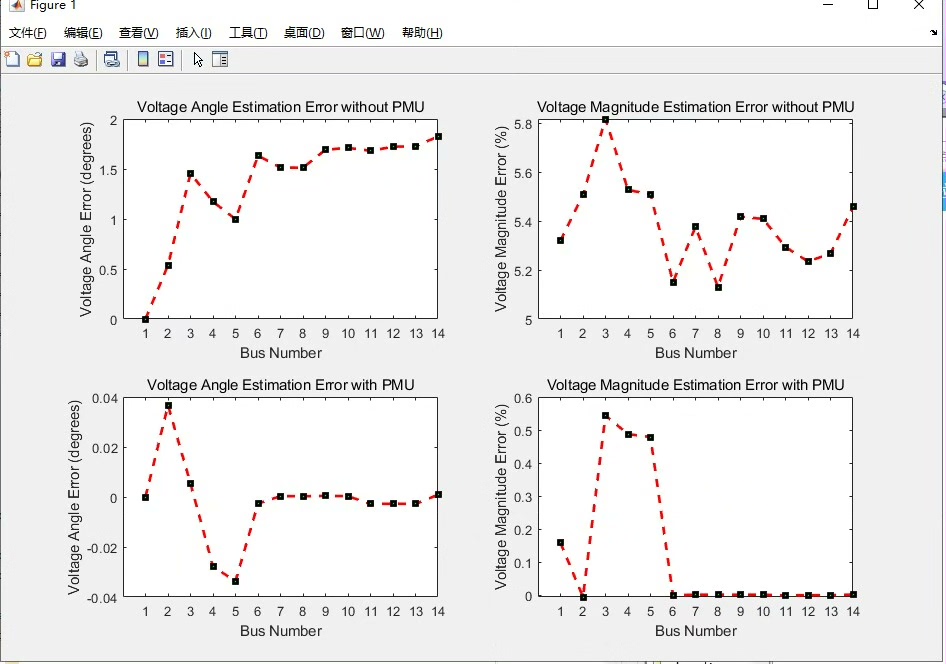
在这篇博文中,咱就来详细聊聊如何利用PMU测量估计电力系统的状态,还会编写Matlab程序,并且在IEEE - 14总线和IEEE - 30总线系统上进行仿真,验证这个方法到底行不行。

电力系统状态估计是根据在少数母线上进行的测量来估计电力系统中所有母线的状态(电压幅值和角度)的过程。 早期的测量设备只能提供测量数量的大小。 但现在,一种叫做相量测量单元(PMU)的高效测量设备正在使用,它可以测量母线的电压相量(大小和角度)以及直接连接线路的电流相量。 由于PMU非常昂贵,因此不能仅使用PMU测量来估计电力系统的状态。 因此,相量测量被用作传统测量的附加测量,以估计电力系统的状态。 在本本文中,解释了使用PMU测量来估计电力系统的状态,编写了Matlab程序,并在IEEE-14总线和IEEE-30总线系统上进行了仿真,以验证该方法。 该方法使用单独的线性状态估计器模型,该模型利用来自WLS的状态估计以及通过后处理的PMU电压和电流测量。 首先,该模型使用传统测量的WLS状态估计方法估计极坐标中的状态。 然后,该状态和PMU测量值(均以直角坐标表示)用于估计系统的最终状态。
这里用到的方法是基于单独的线性状态估计器模型,它巧妙地融合了来自加权最小二乘法(WLS)的状态估计,以及通过后处理的PMU电压和电流测量。
先来看代码部分(以Matlab为例),咱们先构建一个简单的电力系统模型框架,假设已经有了相关的电力系统参数数据,比如节点导纳矩阵等:
% 假设已经有节点导纳矩阵 Ybus
% 导入相关数据,这里省略实际数据导入过程
% 传统测量部分的状态估计
% 利用WLS方法在极坐标下估计状态
theta_est = zeros(nbus,1); % nbus为系统母线数量,初始化角度估计值
V_est = ones(nbus,1); % 初始化电压幅值估计值
% 这里简单写个循环来模拟WLS迭代估计过程
for iter = 1:max_iter
% 计算预测的测量值
z_pred = calculate_measurements(Ybus, theta_est, V_est);
% 计算残差
r = z - z_pred;
% 计算雅克比矩阵 H
H = calculate_jacobian(Ybus, theta_est, V_est);
% 更新状态估计值
delta_x = inv(H'*R^(-1)*H)*H'*R^(-1)*r;
theta_est(2:nbus) = theta_est(2:nbus) + delta_x(1:nbus - 1);
V_est(2:nbus) = V_est(2:nbus) + delta_x(nbus:end);
end上述代码里,先是初始化了角度和电压幅值的估计值,然后通过循环模拟WLS的迭代过程。在每次迭代中,计算预测的测量值z_pred,得到残差r,计算雅克比矩阵H,最后根据这些更新状态估计值。
接下来,结合PMU测量值进行最终状态估计:
% 假设已经获取到PMU测量值,这里以电压相量为例
% PMU测量的电压相量在直角坐标下
V_PMU_rect = [real(V_PMU); imag(V_PMU)];
% 将极坐标下的估计状态转换为直角坐标
V_rect_est = polar2rect(V_est, theta_est);
% 结合PMU测量值更新状态估计
% 这里简单假设一个加权融合的方式,实际可能更复杂
V_rect_final = 0.5 * V_rect_est + 0.5 * V_PMU_rect;
% 再转换回极坐标得到最终的状态估计
[V_final, theta_final] = rect2polar(V_rect_final(1:nbus), V_rect_final(nbus + 1:end)); 这部分代码,先把PMU测量的电压相量转换为直角坐标,将之前极坐标下的估计状态也转成直角坐标,然后采用简单的加权方式融合,最后再转换回极坐标得到最终的状态估计。
这个方法首先利用传统测量的WLS状态估计方法在极坐标中估计状态。之后,把这个状态和以直角坐标表示的PMU测量值结合起来,从而估计出系统的最终状态。通过在IEEE - 14总线和IEEE - 30总线系统上进行仿真,我们可以验证这种结合PMU测量的状态估计方法的有效性和准确性,看看它是不是真的能更精准地估计电力系统的状态啦。
这样一步步下来,咱们就完成了利用PMU测量估计电力系统状态的相关探索,从理论到代码实现,再到实际系统仿真验证,希望对大家理解这个过程有所帮助!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)