混合动力汽车simulink模型 P2插电式混合动力系统simulink模型(可定制) 基于逻...
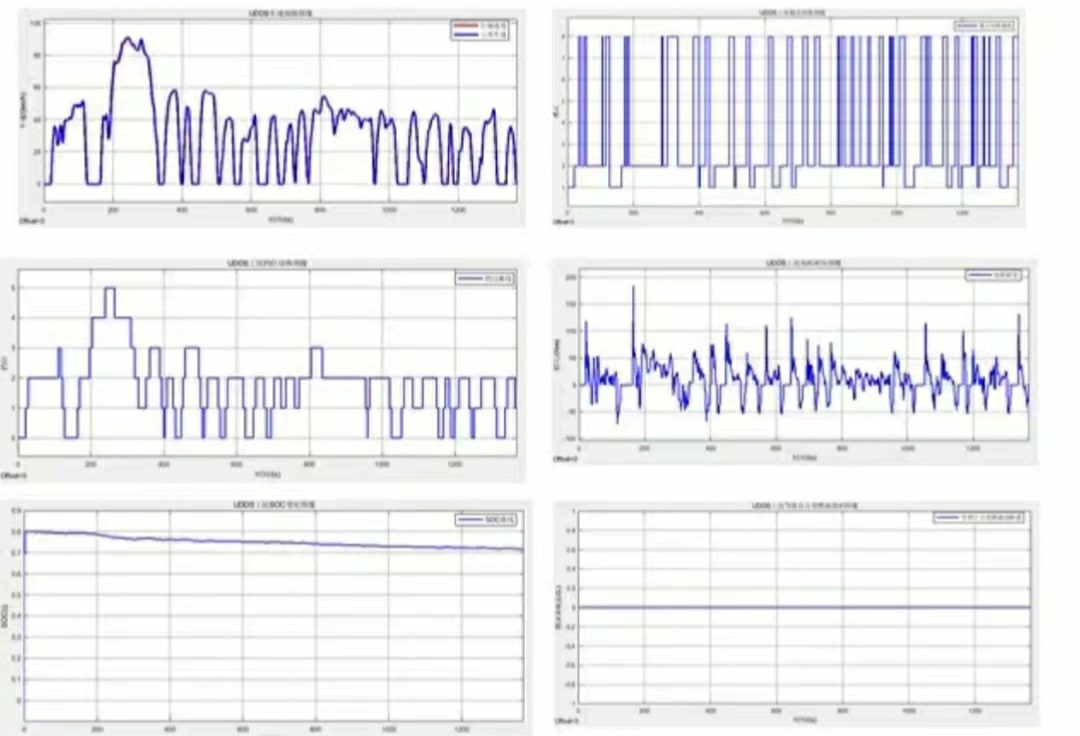
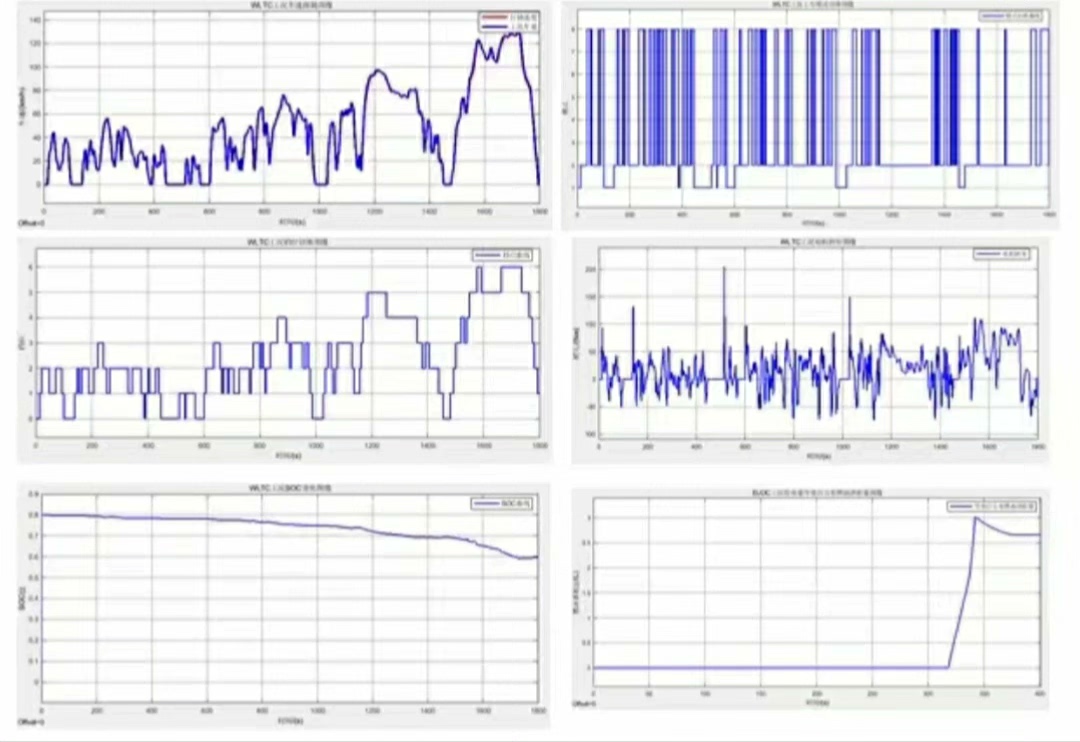
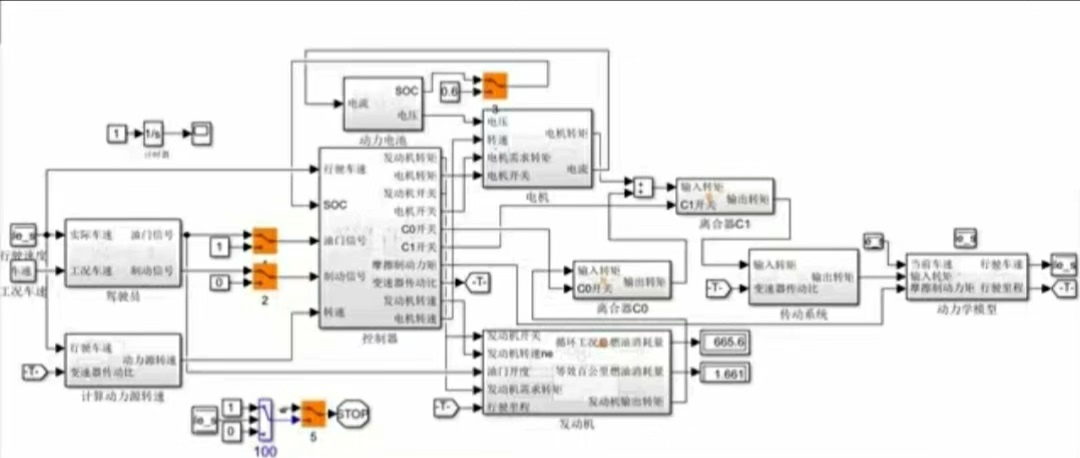
混合动力汽车simulink模型 P2插电式混合动力系统simulink模型(可定制) 基于逻辑门限值控制策略 (模型可完美运行 ) ①(工况可自行添加)已有WLTC、UDDS、EUDC、NEDC工况; ②仿真图像包括 发动机转矩变化图像、电机转矩变化图像、工作模式变化图像、档位变化图像、电池SOC变化图像、等效百公里燃油消耗量图像、速度跟随图像、车速变化图像、最大爬坡度图像; ③整车similink模型中包含工况输入模型、驾驶员模型、发动机模型、电机模型、制动能量回收模型、转矩分配模型、运行模式切换模型、档位切换模型纵向动力学模型; ④simulink模型输入输出均以中文注释。 ⑤m程序可运行出发动机特性曲线、电机特性曲线、电池效率特性曲线、能量回收制动相关特性曲线
P2插电式混合动力系统的Simulink建模就像搭积木——你得先搞清楚各个模块怎么咬合。打开模型第一眼可能会被密密麻麻的连线劝退,但拆开看其实每个子系统都有明确的戏份。比如工况输入模块里藏了个速度曲线生成器,双击能看到用From Workspace模块直接读取.mat格式的工况数据,这里有个小技巧:把UDDS工况的时间-速度序列转置成[time; speed]格式矩阵,导入时记得勾选"Interpolate data"才能保证曲线平滑。
控制策略的核心藏在模式切换逻辑里,这段代码特别有意思:
if VehicleSpeed > 40 || SOC < 0.3
EngineEnable = 1;
MotorMode = 'GENERATOR';
elseif BrakePedal > 0.2
RegenEnable = 1;
else
EV_Mode();
end这可不是教科书上的理论公式,而是实打实的门限值判断。比如当车速突破40km/h或电量低于30%时强制启动发动机,这种粗暴但有效的逻辑在实际调试中反而比优化算法更抗造。注意这里的MotorMode状态切换会联动到后端的转矩分配模型,这时候电池模型的充放电效率曲线就开始起作用了。
说到电池SOC计算,模型里用了个二阶RC等效电路,参数辨识的数据来自台架试验。看这段放电特性代码:
function SOC = calculate_SOC(current)
persistent Q_max cell_count;
if isempty(Q_max)
Q_max = 60*3600; % 60Ah电池
cell_count = 96;
end
SOC = 1 - (current * cell_count)/(2*Q_max);
end这里藏着个新手容易踩的坑——电池单体数量参数必须和实际硬件匹配,之前有个项目因为cell_count设成100导致SOC估算误差超过5%,车辆趴窝在测试场这事我能笑一年。
混合动力汽车simulink模型 P2插电式混合动力系统simulink模型(可定制) 基于逻辑门限值控制策略 (模型可完美运行 ) ①(工况可自行添加)已有WLTC、UDDS、EUDC、NEDC工况; ②仿真图像包括 发动机转矩变化图像、电机转矩变化图像、工作模式变化图像、档位变化图像、电池SOC变化图像、等效百公里燃油消耗量图像、速度跟随图像、车速变化图像、最大爬坡度图像; ③整车similink模型中包含工况输入模型、驾驶员模型、发动机模型、电机模型、制动能量回收模型、转矩分配模型、运行模式切换模型、档位切换模型纵向动力学模型; ④simulink模型输入输出均以中文注释。 ⑤m程序可运行出发动机特性曲线、电机特性曲线、电池效率特性曲线、能量回收制动相关特性曲线
仿真结果里最带感的是模式切换时的扭矩波动。跑个WLTC工况,盯着发动机扭矩曲线看——注意2分17秒那个尖峰,那是急加速时电机突然介入造成的扭矩耦合。解决方法是在转矩分配模块加了个斜坡函数:
add_block('simulink/Discontinuities/Rate Limiter', 'TorqRamp');
set_param('TorqRamp', 'RisingSlewLimit', '500');
set_param('TorqRamp', 'FallingSlewLimit', '800');把扭矩变化率限制在500Nm/s后,传动轴震动明显减弱。这种工程细节在论文里通常被忽略,但实际调参时能省下80%的NVH整改成本。
用m脚本画发动机万有特性图时,记得把台架数据转成等高线:
contourf(EngineSpeed, EngineTorque, BSFC, 'ShowText','on');
colormap(jet);
hold on;
plot(optimum_speed, optimum_torque, 'wx', 'MarkerSize',12);那个白色叉标就是发动机最佳效率区,在能量管理策略里要尽量让工作点落在这个区域附近。有个反直觉的现象:有时候让电机多出力虽然耗电,但综合油耗反而更低,这就是为什么需要做全局优化。
模型的自定义空间确实大,上次给某主机厂改了个爬坡工况,直接在DrivingCycle模块里喂入30%坡度的三角波信号。重点是要同步修改纵向动力学模型中的坡度阻力项,不然会出现车速倒流的鬼畜现象。改完一跑,看着电机扭矩直逼600Nm的极限值,电池SOC像跳水似的往下掉,那酸爽——不过客户要的就是这种极端工况的测试能力。
最后说个冷知识:模型里的中文注释其实是用Simulink.Label模块实现的,比直接写注释框更整洁。遇到信号线太多看不清走向时,试试Ctrl+Shift+A快捷键全选后自动排列,比手动拖拽省力十倍。这些操作技巧可能比模型算法本身更能提升工作效率,你说是不是?

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 6
6 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)