PMSM电机的转速控制Simulink模型与全状态参数观测
PMSM电机的转速控制Simulink模型 PMSM电机的全状态参数观测 主要包括内容: 1)基于PID的PMSM电机转速控制模型; 2)基于滑模控制器(SMC)的PMSM电机转速控制模型; 3)PMSM电机在PID转速控制下的状态参数识别,如:转动惯量、负载力矩、定子电阻,永磁磁链,dq轴电感等。 4)PMSM电机在SMC转速控制下的状态参数识别,如:转动惯量、负载力矩、定子电阻,永磁磁链,dq轴电感等。
嘿,各位搞电机控制的小伙伴们,今天咱来唠唠PMSM电机的转速控制Simulink模型以及全状态参数观测这俩事儿。
一、基于PID的PMSM电机转速控制模型
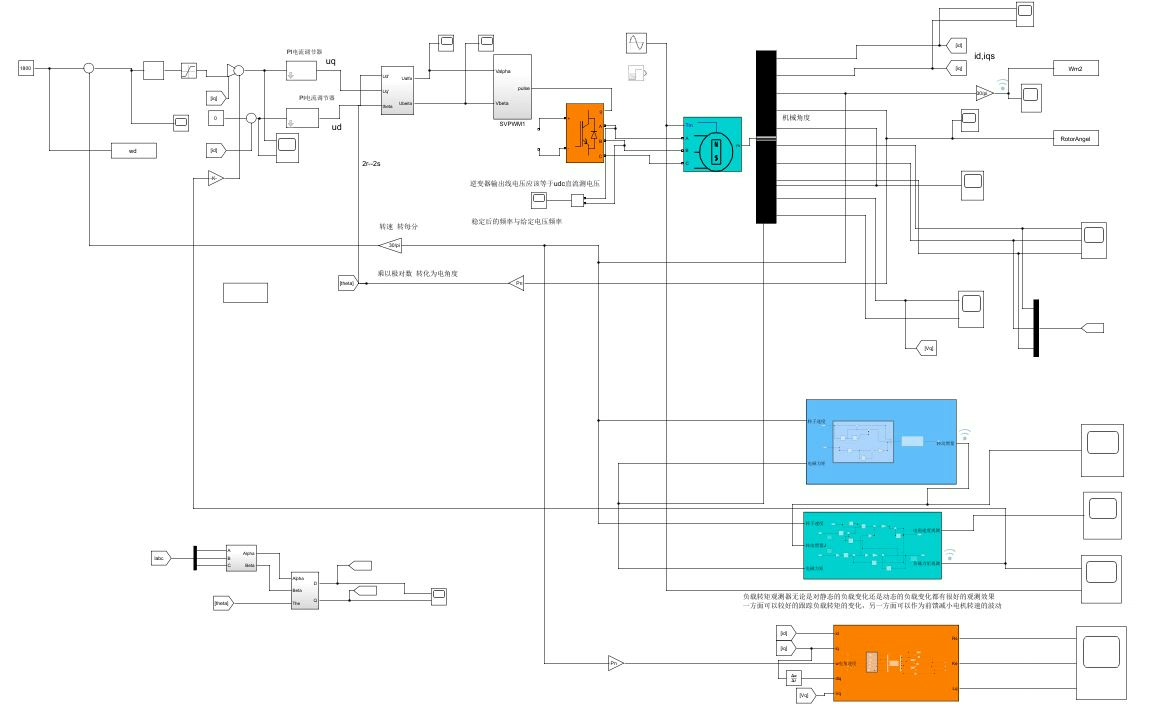
PID控制器,这可是控制领域的元老级选手了。在PMSM电机转速控制里,它依然发挥着重要作用。在Simulink里搭建这个模型,思路也不复杂。
咱先看代码逻辑(以下伪代码示意,非完整可运行代码):
% 初始化参数
kp = 0.5; % 比例系数
ki = 0.1; % 积分系数
kd = 0.05; % 微分系数
setpoint = 1000; % 目标转速
previous_error = 0;
integral = 0;
while true
current_speed = get_speed(); % 获取当前转速
error = setpoint - current_speed;
integral = integral + error;
derivative = error - previous_error;
control_signal = kp * error + ki * integral + kd * derivative;
set_control_signal(control_signal); % 设置控制信号到电机
previous_error = error;
end在这个简单的代码逻辑里,首先设定了PID控制器的三个关键系数kp、ki、kd 。然后明确目标转速setpoint 。在循环里,不断获取当前转速currentspeed ,算出误差error ,误差的积分integral和微分derivative ,最后得出控制信号controlsignal 去控制电机转速。
在Simulink模型中,就可以用PID Controller模块来实现这个逻辑。将转速反馈连接到PID Controller的输入,其输出作为电机的控制信号。这样就基本搭建好了基于PID的PMSM电机转速控制模型。
二、基于滑模控制器(SMC)的PMSM电机转速控制模型
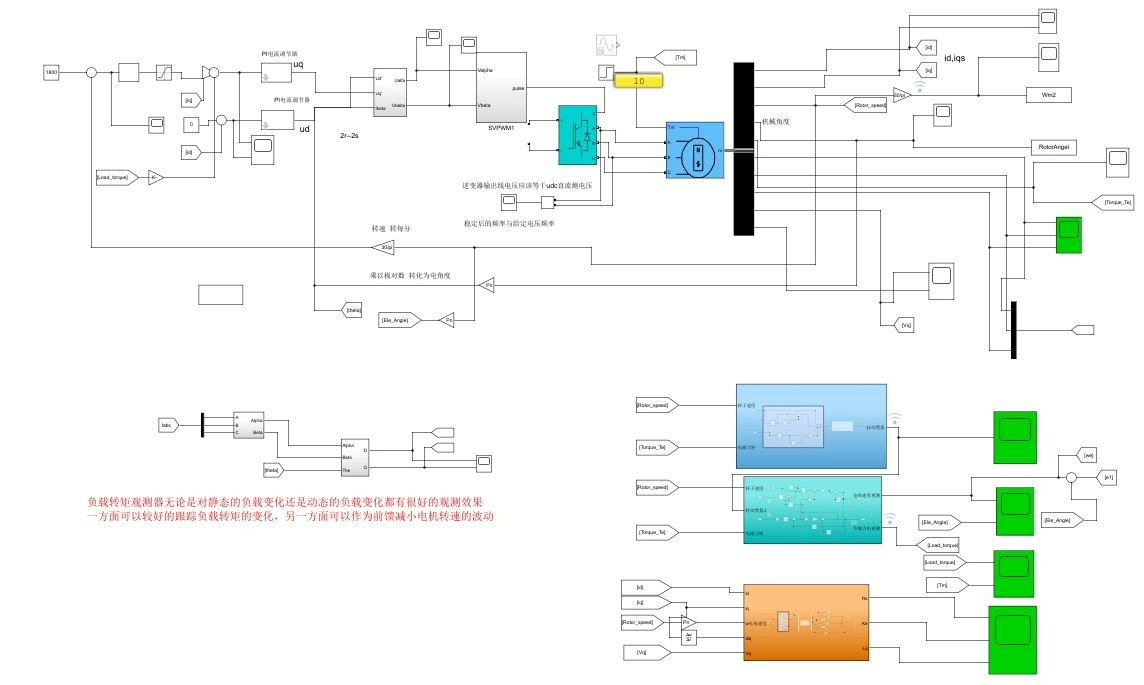
滑模控制器,相比PID更具鲁棒性。它的核心思想是让系统状态在预先设计好的“滑动面”上运动。
PMSM电机的转速控制Simulink模型 PMSM电机的全状态参数观测 主要包括内容: 1)基于PID的PMSM电机转速控制模型; 2)基于滑模控制器(SMC)的PMSM电机转速控制模型; 3)PMSM电机在PID转速控制下的状态参数识别,如:转动惯量、负载力矩、定子电阻,永磁磁链,dq轴电感等。 4)PMSM电机在SMC转速控制下的状态参数识别,如:转动惯量、负载力矩、定子电阻,永磁磁链,dq轴电感等。
同样看一段简单代码逻辑(伪代码):
% 初始化参数
lambda = 0.5; % 滑模面系数
k = 10; % 控制增益
setpoint = 1000; % 目标转速
while true
current_speed = get_speed();
error = setpoint - current_speed;
s = lambda * error + derivative(error); % 滑模面函数
if s > 0
control_signal = -k;
else
control_signal = k;
end
set_control_signal(control_signal);
end这里先设定了滑模面系数lambda和控制增益k 。在循环中计算误差error ,通过滑模面函数s 来判断控制信号的取值。如果s大于0 ,控制信号为 -k ,否则为k 。在Simulink里搭建模型时,可以自己搭建滑模控制算法的模块,或者利用一些已经封装好的滑模控制相关模块,将转速反馈引入,按上述逻辑计算出控制信号给到电机。
三、PMSM电机在PID转速控制下的状态参数识别
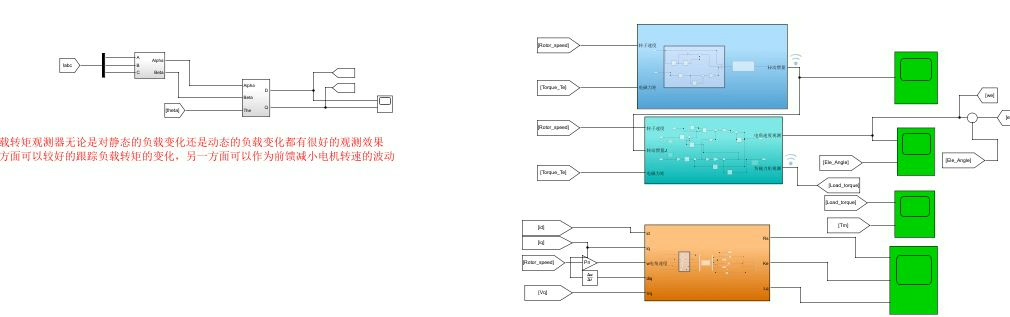
在PID转速控制下,咱要识别像转动惯量、负载力矩、定子电阻,永磁磁链,dq轴电感等这些关键参数。这一般会用到一些辨识算法。
比如说用递推最小二乘法(RLS)来识别转动惯量。代码示例如下(Matlab代码):
% 初始化
N = 1000; % 数据长度
theta_hat = zeros(1,1); % 转动惯量估计值初始化
P = 10000 * eye(1); % 协方差矩阵初始化
y = zeros(N,1); % 测量输出
u = randn(N,1); % 输入激励信号
for k = 1:N
phi = u(k);
y(k) = get_speed_measurement(); % 获取转速测量值
K = P * phi / (1 + phi' * P * phi);
theta_hat = theta_hat + K * (y(k) - phi' * theta_hat);
P = (eye(1) - K * phi') * P;
end这里先初始化了数据长度N ,转动惯量估计值thetahat ,协方差矩阵P 等。在循环里,不断获取转速测量值y(k) ,利用递推最小二乘法公式更新转动惯量估计值thetahat 。对于其他参数,也有类似的辨识算法和代码实现,只不过输入输出变量和算法公式会有所不同。
四、PMSM电机在SMC转速控制下的状态参数识别
和PID控制下类似,在SMC转速控制时也能对这些参数进行识别。同样可以用递推最小二乘法或者其他更适合滑模控制下的辨识算法。
比如说还是用RLS来识别永磁磁链,代码可能如下(Matlab代码):
% 初始化
M = 800; % 数据长度
psi_hat = zeros(1,1); % 永磁磁链估计值初始化
Q = 10000 * eye(1); % 协方差矩阵初始化
z = zeros(M,1); % 测量输出
v = randn(M,1); % 输入激励信号
for j = 1:M
gamma = v(j);
z(j) = get_flux_measurement(); % 获取磁链测量值
L = Q * gamma / (1 + gamma' * Q * gamma);
psi_hat = psi_hat + L * (z(j) - gamma' * psi_hat);
Q = (eye(1) - L * gamma') * Q;
end思路和PID控制下识别转动惯量差不多,初始化相关参数后,在循环里通过测量值和算法公式不断更新永磁磁链估计值psi_hat 。
总之,无论是PMSM电机的转速控制模型搭建,还是状态参数识别,在Simulink里都有很多好玩的事儿可以研究,希望今天分享的这些能给大家带来点启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 1
1 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)