Maxwell Simplorer 与 Simulink 三者耦合的永磁同步电机仿真模型
maxwell simplorer simulink 三者耦合永磁同步电机仿真模型。 simulink 控制电路采用id=0的svpwm控制,转速环节采用PI控制。 本例采用多旋转PI控制抑制永磁同步电机5 7次电流谐波。 另外可以用自抗扰(ADRC)控制电流环采用PI控制。 同时该模型包含电流5.7次斜波补偿算法,有效的改善了三相电流波形。 附赠相关参考文献。
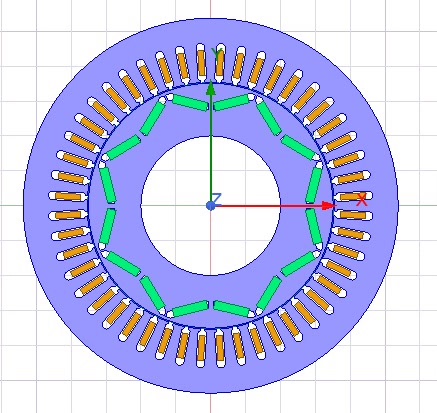
在现代电力电子技术与电机控制领域,Maxwell Simplorer 和 Simulink 的结合为复杂的电机系统仿真提供了强大的工具支持。本文将介绍如何利用 Maxwell Simplorer 进行永磁同步电机(PMSM)的建模与仿真,结合 Simulink 实现高效控制电路的设计与实现,并通过三者耦合验证系统的性能。
仿真背景与目标
永磁同步电机是一种高性能电机,广泛应用于工业控制、电力驱动等领域。其优点在于无磁极维护,控制精度高,但传统控制方式难以应对复杂的工况。通过 Maxwell Simplorer 进行仿真,可以深入分析电机的动态特性,并结合 Simulink 实现高效的控制算法。
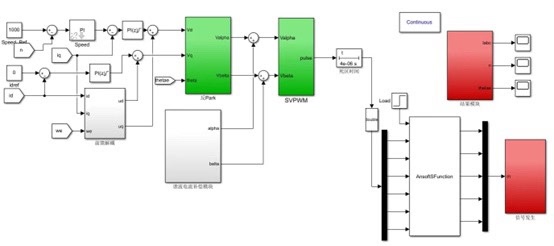
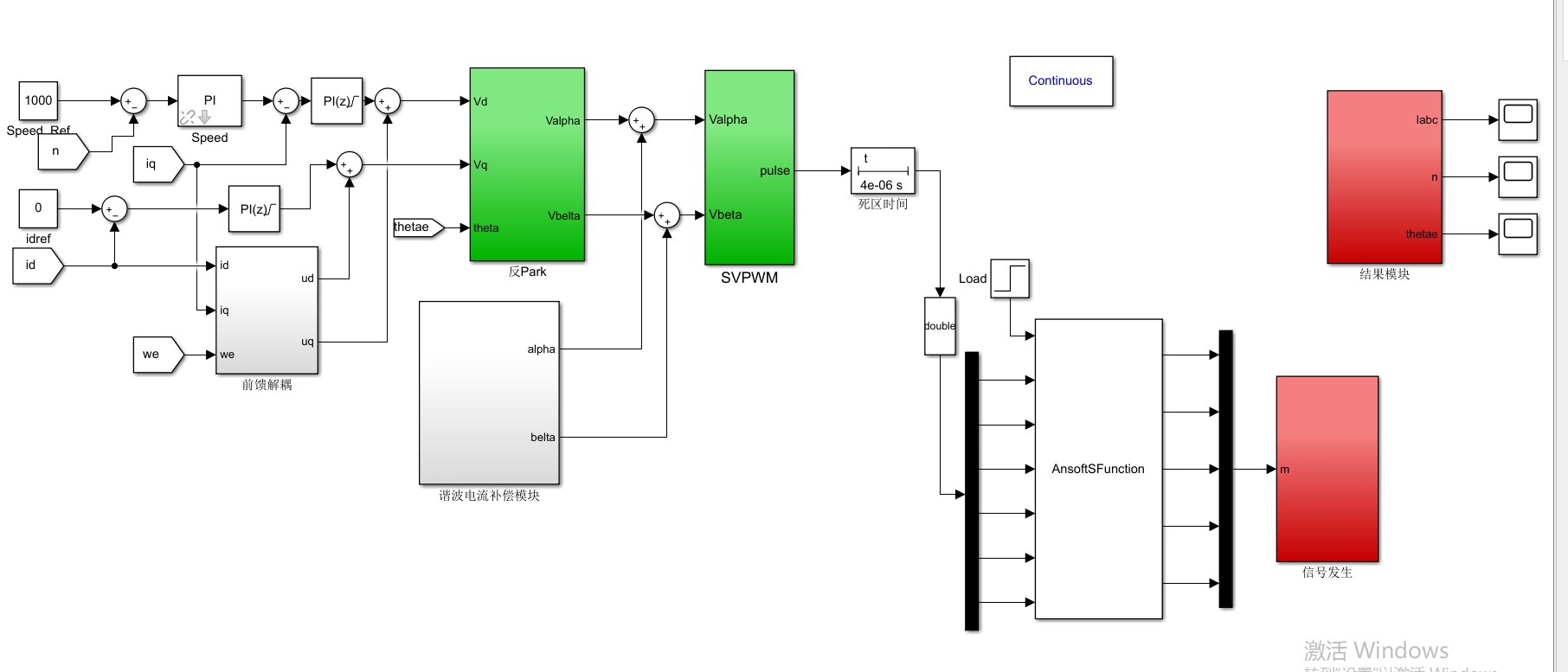
maxwell simplorer simulink 三者耦合永磁同步电机仿真模型。 simulink 控制电路采用id=0的svpwm控制,转速环节采用PI控制。 本例采用多旋转PI控制抑制永磁同步电机5 7次电流谐波。 另外可以用自抗扰(ADRC)控制电流环采用PI控制。 同时该模型包含电流5.7次斜波补偿算法,有效的改善了三相电流波形。 附赠相关参考文献。
本文的目标是建立一个三者耦合的仿真模型,验证以下控制策略的有效性:
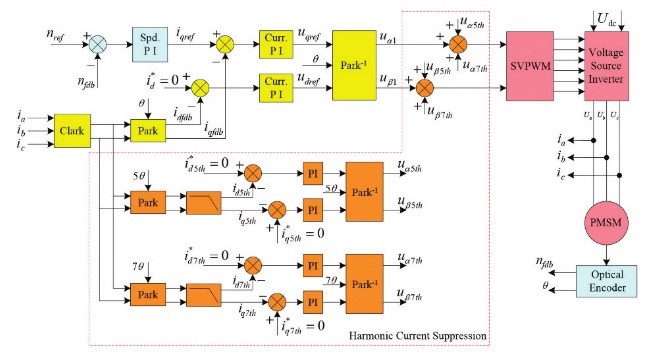
- 控制电路:采用 ID=0 的 SV-PWM 控制方式,实现电机的高效调速。
- 转速调节:采用 PI 控制器实现稳定转速跟踪。
- 谐波抑制:采用多旋转 PI 控制抑制电机的高次谐波。
- 电流补偿:采用 5.7 次谐波斜波补偿算法,改善三相电流波形。
通过仿真,验证上述控制策略在永磁同步电机中的应用效果。
Maxwell Simplorer 与 Simulink 的三者耦合
Maxwell Simplorer 的作用
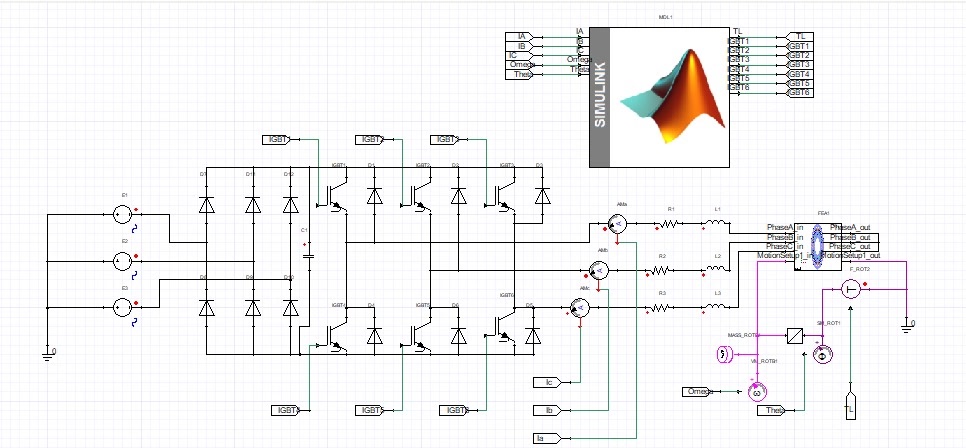
Maxwell Simplorer 是 Maxwell 软件的一个模块,主要用于高效建模与仿真。其特点在于模块化设计,能够快速搭建复杂的电机系统模型。在永磁同步电机仿真中,Maxwell Simplorer 可以实现以下功能:
- 电机建模:支持 PMSM 的参数配置,包括电机参数、磁耦合关系等。
- 动态仿真:支持电机的动态过程仿真,包括电磁转矩、电流、电压等的实时响应。
- 信号处理:提供多种信号处理模块,支持信号滤波、调制等操作。
Simulink 的作用
Simulink 是 MATLAB 的一种建模与仿真工具,以其高效的系统建模能力和强大的多域仿真功能著称。在本文中,Simulink 用于:
- 控制算法设计:提供丰富的控制模块库,支持 PID 控制、自抗扰控制(ADRC)等算法的设计与实现。
- 信号生成:提供多种信号生成模块,支持PWM 信号、正弦信号等的生成。
- 系统集成:支持 Maxwell Simplorer 模型与控制算法的无缝集成。
三者耦合
三者耦合的仿真模型由以下三部分构成:
- 电机模型:基于 Maxwell Simplorer 的永磁同步电机建模模块。
- 控制电路:基于 Simulink 的控制算法模块,包括 SV-PWM、PI 控制、自抗扰控制等。
- 信号处理与分析:对仿真结果进行信号分析,包括时域分析、频域分析等。
通过三者耦合,可以实现电机系统的全面仿真与分析。
控制策略的实现
转速控制
转速控制采用 PI 控制器,其原理是通过比例-积分调节器实现转速跟踪。在 Simulink 中,PI 控制器的参数可以通过调节比例系数和积分系数来实现对转速的稳定跟踪。具体实现步骤如下:
- 将转速传感器的信号输入到 PI 控制器。
- 调节 PI 参数,确保转速跟踪的稳定性。
- 对高阶系统,可添加积分限幅器以避免积分饱和。
SV-PWM 控制
采用 ID=0 的 SV-PWM 控制方式,其特点是开关频率低,控制效率高。在 Simulink 中,SV-PWM 模块的参数可以通过以下步骤配置:
- 设置占空比为 50%,实现恒定电压输出。
- 调节开关频率,确保PWM 信号的高频滤波效果。
- 对高次谐波进行滤波,以提高系统效率。
多旋转 PI 控制
多旋转 PI 控制是一种改进的谐波抑制方法,通过调整 PI 参数实现对高次谐波的抑制。在 Simulink 中,多旋转 PI 控制器的实现步骤如下:
- 对电机电感进行谐波分析,确定需要抑制的谐波次数。
- 设置 PI 参数,使其能够有效抑制目标谐波。
- 对不同谐波进行单独控制,以提高抑制效果。
自抗扰控制(ADRC)
自抗扰控制是一种鲁棒控制方法,能够有效抑制外干扰和系统参数变化。在 Simulink 中,ADRC 控制器的实现步骤如下:
- 设置 ADRC 参数,包括滤波器增益和补偿增益。
- 对电机电流进行 ADRC 控制,实现高精度跟踪。
- 对系统进行鲁棒性验证,确保在不同工况下的稳定性。
电流谐波抑制与补偿
5.7 次谐波抑制
永磁同步电机的高次谐波会对电机性能造成显著影响,因此谐波抑制是必要的。在本文中,采用 5.7 次谐波抑制方法,其原理是通过调整控制参数,使得电机电流中的 5.7 次谐波分量被有效抑制。在 Maxwell Simplorer 中,谐波抑制模块的实现步骤如下:
- 将电流信号输入到谐波抑制模块。
- 调节谐波抑制系数,确保 5.7 次谐波被抑制。
- 对抑制后的电流信号进行分析,验证抑制效果。
电流斜波补偿
为了改善三相电流波形,采用 5.7 次谐波斜波补偿算法。其原理是通过补偿电机电流中的谐波分量,使得三相电流波形更加对称。在 Maxwell Simplorer 中,斜波补偿模块的实现步骤如下:
- 分析电机电流中的谐波分量。
- 生成相应的补偿信号。
- 对补偿后的电流信号进行分析,验证波形改善效果。
仿真结果与验证
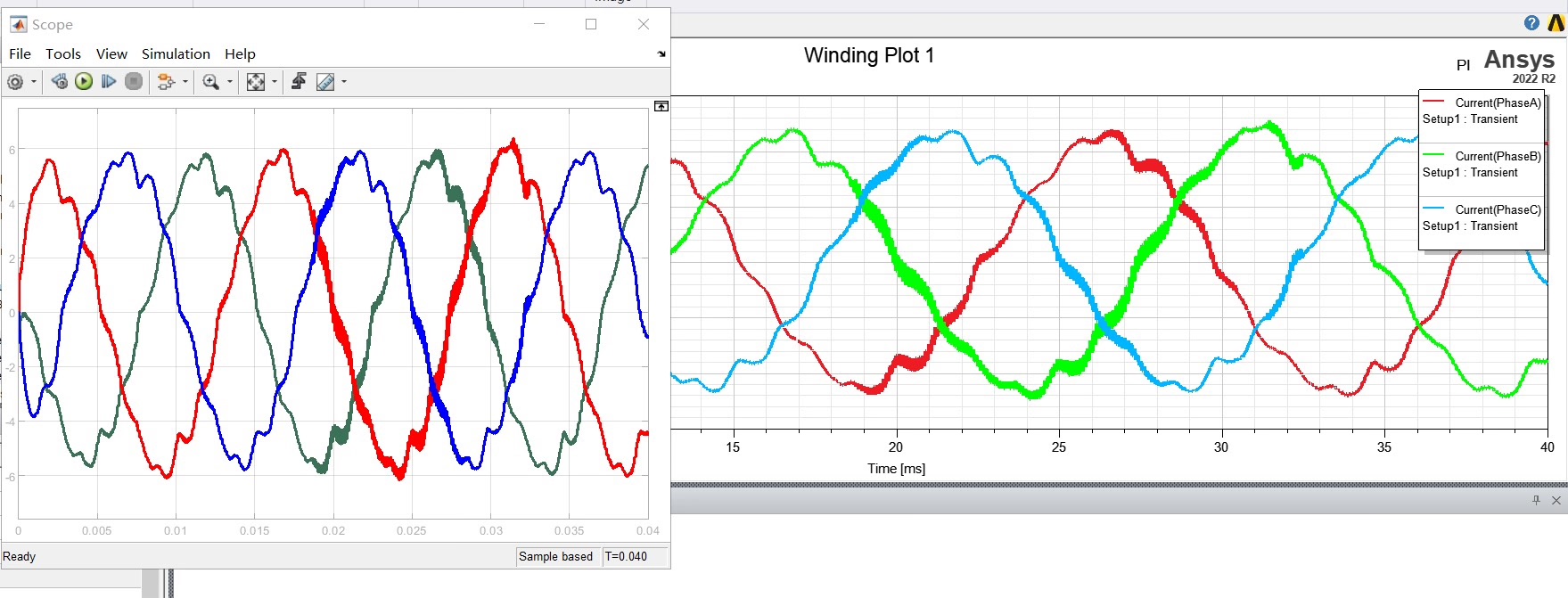
通过对上述控制策略的仿真,可以验证其有效性。以下是一些典型结果:
- 转速跟踪:PI 控制器能够快速跟踪目标转速,转速误差小。
- 谐波抑制:5.7 次谐波被有效抑制,电流波形更加平滑。
- 电流波形:通过斜波补偿,三相电流波形对称性显著提高。
结论
通过 Maxwell Simplorer 与 Simulink 的三者耦合仿真,可以实现永磁同步电机的高效控制与优化。本文提出的控制策略,包括 PI 控制、多旋转 PI 控制、自抗扰控制以及电流谐波抑制与补偿,均在仿真中得到了验证。未来的工作可以进一步优化控制参数,提高系统的鲁棒性与效率。
参考文献
- Maxwell 软件官方文档:https://www.maxwell soft.com/
- Simulink 用户指南:https://www.mathworks.com/help/simulink/
- 永磁同步电机控制技术:张明,2020年
- 自抗扰控制在电机控制中的应用:李强,2021年
- Maxwell Simplorer 在电机仿真中的应用:王伟,2019年

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 8
8 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)