嵌入式人工智能(嵌入式AI)无人机案例
一、嵌入式人工智能核心解析
1.1 定义与核心定位
嵌入式人工智能(Embedded AI)是将人工智能技术(算法、模型、推理能力)与嵌入式系统深度融合,使嵌入式设备在本地端(无需依赖云端服务器)实现数据采集、实时分析、智能决策与执行的技术形态[superscript:2]。它打破了传统嵌入式设备“被动执行指令”的局限,赋予设备“感知-分析-决策”的自主能力,核心定位是“轻量化、低功耗、高实时性”,适配嵌入式设备有限的算力、存储资源和供电条件,是AI技术从云端走向物理世界、实现“万物智能”的关键落地载体。
简单来说,嵌入式人工智能就是“把AI大脑装在小型硬件设备里”,比如无人机的自主避障、智能手表的心率异常检测、智能家居的语音唤醒,都属于嵌入式AI的典型应用——无需联网,设备自身就能完成智能处理。
1.2 核心技术架构(从底层到上层)
嵌入式人工智能的架构分为4层,各层协同工作,兼顾轻量化与实用性,适配嵌入式设备的资源约束,具体如下:
-
硬件层(核心支撑):嵌入式AI的算力底座,核心是“通用处理器+AI加速单元”的异构架构,既要满足设备控制的实时性,也要支撑AI模型的高效推理。
-
通用处理器(MCU/MPU):负责设备整体控制、外设驱动、数据交互,如STM32系列MCU、瑞芯微3588 MPU;
-
AI加速单元:专门负责AI算法的并行计算,降低通用处理器负担,常见的有NPU(神经处理单元)、FPGA、DSP,其中NPU因低功耗、高算力密度,是当前嵌入式AI的主流加速方案[superscript:4];
-
感知硬件:摄像头、传感器(如MPU-6050)等,为AI模型提供原始数据输入。
-
-
驱动层(衔接硬件与软件):负责硬件设备的驱动与管理,包括AI加速单元驱动、传感器驱动、通信接口驱动,确保上层软件能正常调用底层硬件资源,比如NPU驱动、摄像头驱动、I2C/SPI接口驱动。
-
软件层(核心功能实现):嵌入式AI的“大脑中枢”,分为系统软件和应用软件,核心是轻量化AI框架与算法。
-
操作系统(RTOS/轻量级Linux):保障实时性和资源调度,如FreeRTOS、NuttX、Ubuntu Core,其中RTOS适合低算力设备,轻量级Linux适合中高算力设备(如无人机、边缘网关);
-
AI框架:适配嵌入式场景的轻量化框架,如TensorFlow Lite、PyTorch Mobile、ONNX Runtime Lite,用于AI模型的压缩、部署与推理,核心是将云端训练好的模型,转换为嵌入式设备可运行的轻量化版本;
-
AI算法:适配嵌入式资源的轻量化算法,如图像识别领域的MobileNet、目标检测领域的YOLOv5s(轻量化版本)、传感器融合领域的卡尔曼滤波算法[superscript:2]。
-
-
应用层(落地场景):基于底层技术,实现具体的智能功能,如无人机的自主避障、目标跟踪,智能摄像头的人脸检测,工业设备的故障预警等。
1.3 核心技术特点(与传统AI、嵌入式系统的区别)
-
本地化运行:AI模型推理、数据处理均在设备本地完成,无需依赖云端,避免网络延迟、断网风险,同时保护数据隐私(敏感数据无需上传云端);
-
低功耗、轻量化:针对嵌入式设备的电池供电、算力有限特点,对AI模型进行压缩(量化、剪枝、知识蒸馏),对算法进行优化,降低算力消耗和功耗[superscript:2];
-
高实时性:响应时间通常在毫秒级,适配实时控制场景,如无人机避障、工业机器人抓取,避免因延迟导致事故[superscript:2];
-
高可靠性:适配恶劣环境(高低温、振动、电磁干扰),如工业控制、无人机户外飞行,确保AI功能稳定运行;
-
资源适配性:可根据嵌入式设备的算力、存储资源,灵活调整AI模型的复杂度,从简单的分类算法到复杂的深度学习推理,均能适配。
1.4 主流应用领域
嵌入式人工智能已广泛渗透到多个领域,核心场景包括:
-
智能交通:无人机巡检、车载ADAS(车道偏离预警、行人检测);
-
工业控制:工业机器人自主避障、设备故障智能诊断;
-
消费电子:智能手表、智能家居(语音唤醒)、可穿戴设备;
-
安防监控:智能摄像头人脸检测、异常行为识别;
-
无人机:自主避障、目标跟踪、精准降落、多机协同。
二、嵌入式人工智能在无人机中的实战案例
本次实战案例聚焦无人机AI自主避障与目标跟踪巡检系统,适配工业级巡检场景(如高速公路、电力线路巡检),结合嵌入式AI技术,实现无人机自主规划航线、实时避障、目标识别与跟踪,无需人工远程操控,大幅提升巡检效率,降低人工成本,贴合当前无人机智能化发展趋势。
2.1 案例背景
传统无人机巡检(如高速公路、电力线路)存在三大痛点:一是依赖人工远程操控,操作人员需具备专业技能,且长时间巡检易疲劳,导致漏检、误检;二是户外环境复杂(如树木、电线杆、建筑物遮挡),人工操控易出现碰撞事故,损坏设备;三是巡检数据需人工后期分析,效率低下,无法实现实时预警[superscript:3]。
基于此,依托嵌入式人工智能技术,开发无人机AI自主避障与目标跟踪巡检系统,实现“自主起飞→航线规划→实时避障→目标识别→数据存储与上报”全流程自动化,解决传统巡检的痛点,适用于高速公路、电力、园区等场景的常态化巡检,参考广西高速无人机巡检的实际应用需求,实现事故、异常停车等目标的秒级识别与响应[superscript:3]。
2.2 案例描述
本案例实现一款工业级巡检无人机,核心功能的嵌入式AI模块集成在无人机机载控制器中,无需依赖云端算力,全程本地完成智能决策,具体功能如下:
-
自主航线规划:用户通过地面站设置巡检区域(如高速公路某路段),无人机自动生成最优巡检航线,支持断点续飞;
-
实时AI避障:通过机载摄像头和激光雷达采集环境数据,嵌入式AI算法实时识别障碍物(树木、电线杆、建筑物、车辆),自动调整飞行姿态和航线,避免碰撞;
-
目标识别与跟踪:实时识别巡检目标(如高速公路事故车辆、抛洒物、电力线路缺陷),识别准确率≥95%,同时跟踪目标,拍摄清晰图像,记录目标位置信息[superscript:3];
-
数据本地存储与远程上报:巡检数据(图像、目标信息、飞行日志)本地存储,同时通过无线通信上传至地面站,支持实时查看和历史回溯;
-
应急处理:遇到紧急情况(如低电量、强干扰),自动触发返航或迫降,保障设备安全。
系统核心优势:全程本地嵌入式AI推理,响应时间≤100ms,避障精度±10cm,目标识别响应时间≤500ms,适配户外复杂环境,可替代人工完成高强度巡检任务,巡检效率提升3倍以上,巡检成本降低80%[superscript:3]。
2.3 案例实现涉及的核心组件(芯片、系统、软件等)
本案例的嵌入式AI系统基于“单芯片异构架构”设计,替代传统“MPU+MCU”双芯片方案,简化硬件设计,提升系统兼容性和实时性,核心组件如下,覆盖硬件、软件、通信、数据库全领域:
(一)硬件组件(核心算力与感知底座)
-
主控制芯片(MPU):瑞芯微RK3588,异构SoC芯片,作为系统核心,承担通用计算、资源调度、多任务管理[superscript:4]。
-
核心参数:搭载Cortex-A76/A55高性能应用核与专用实时核,支持多线程运算,满足无人机飞行控制与AI推理的双重需求;
-
核心作用:运行操作系统、管理外设(摄像头、激光雷达)、协调AI加速单元与飞行控制模块的协同工作。
-
-
AI芯片(NPU):瑞芯微RK3588内置NPU,作为AI加速单元。
-
核心参数:支持INT4/INT8/FP16混合精度计算,算力达6TOPS(每秒6万亿次运算),低功耗设计,适配无人机电池供电;
-
核心作用:加速AI算法推理(避障识别、目标检测),降低主控制芯片负担,确保AI功能的实时性,支撑目标识别、环境感知等核心智能任务。
-
-
辅助控制芯片(MCU):STM32H743,作为实时控制核心。
-
核心作用:负责无人机飞行姿态控制(滚转、俯仰、偏航)、电机驱动、传感器数据采集(IMU、GPS),保障飞行稳定性,与主控制芯片协同工作,实现“智能决策-飞行控制”的无缝衔接。
-
-
感知硬件:
-
高清摄像头(20倍光学变焦):采集环境图像和目标图像,为AI避障、目标识别提供原始数据,支持白天/夜间(红外模式)拍摄,适配复杂光照环境[superscript:3];
-
激光雷达:测量障碍物距离,精度±1cm,辅助AI避障,弥补摄像头在复杂遮挡场景下的不足;
-
IMU传感器(MPU-6050):采集无人机飞行姿态数据(加速度、角速度),用于姿态解算和飞行控制;
-
GPS/北斗模块:定位无人机位置,用于航线规划和目标位置记录,支持GPS拒止环境下的辅助定位[superscript:3]。
-
-
存储设备:64GB eMMC闪存(本地存储)+ 128GB SD卡(备份),存储巡检数据、AI模型、飞行日志,支持数据本地回溯。
-
通信模块:4G/5G模块 + WiFi模块,用于无人机与地面站的通信,上传巡检数据、接收地面控制指令。
(二)操作系统
-
主操作系统:Linux(Ubuntu Core,轻量级版本),运行于瑞芯微RK3588的高性能核。
-
核心作用:承载AI算法、图像处理、数据管理、网络通信,支持多任务并发,适配高算力需求,内置ROS2中间件,便于搭建智能任务框架[superscript:4];
-
优势:开源生态完善,支持各类AI框架和软件工具,可灵活扩展功能,适配无人机的智能任务处理需求。
-
-
实时操作系统:NuttX,运行于瑞芯微RK3588的专用实时核。
-
核心作用:负责无人机飞行控制、电机驱动、传感器数据采集,具备高实时性(响应时间≤10ms),保障飞行稳定性,完整移植PX4飞控栈,复用成熟的飞控能力[superscript:4];
-
优势:轻量级、低功耗,适合实时控制场景,与Linux系统通过虚拟化技术实现硬件级隔离,确保飞行控制不受智能任务干扰。
-
-
虚拟化技术:Jailhouse轻量级硬件辅助虚拟化hypervisor。
-
核心作用:实现Linux与NuttX双系统的硬件级隔离,为两个系统划分独立的资源域,确保Linux侧的AI任务负载变化不影响NuttX侧的飞行控制,同时通过专用IPC机制实现跨核通信,降低数据传输延迟[superscript:4]。
-
(三)数据库
-
本地数据库:SQLite3(轻量级嵌入式数据库),部署在无人机机载控制器中。
-
核心作用:存储本地巡检数据,包括目标识别结果(目标类型、位置、时间)、飞行日志(飞行速度、姿态、位置)、设备状态数据,支持本地查询和数据导出;
-
优势:轻量级、无需独立服务器,占用资源少,适配嵌入式设备,支持断电数据保护,确保巡检数据不丢失。
-
-
地面站数据库:MySQL,部署在地面站服务器中。
-
核心作用:存储无人机上传的巡检数据,实现数据汇总、分析、可视化,支持多无人机数据管理,用于巡检报告生成和历史数据回溯;
-
辅助工具:Redis(缓存数据库),缓存实时巡检数据,提升地面站数据查询速度。
-
-
数据存储补充:借助dataman模块存储巡检任务、地理围栏等数据,通过logger模块将飞行数据记录至SD卡,或通过通信协议传输至地面站,用于数据回溯分析。
(四)软件与AI框架
-
AI框架:TensorFlow Lite(轻量化嵌入式AI框架)。
-
核心作用:将云端训练好的AI模型(避障模型、目标检测模型)压缩、转换为嵌入式设备可运行的轻量化模型(.tflite格式),部署在瑞芯微RK3588的NPU中,实现AI推理加速;
-
优势:轻量级、低功耗,支持NPU硬件加速,适配嵌入式设备的算力和存储资源,开发便捷,可快速完成模型部署。
-
-
AI算法:
-
避障算法:轻量化YOLOv5s + 激光雷达数据融合算法,实时识别障碍物(树木、电线杆、车辆等),计算障碍物距离和避让路径,响应时间≤100ms[superscript:2];
-
目标识别算法:MobileNet SSD(轻量化目标检测算法),识别巡检目标(事故车辆、抛洒物、电力缺陷),准确率≥95%,支持多目标同时识别;
-
传感器融合算法:卡尔曼滤波算法,融合IMU、GPS、激光雷达数据,提升无人机姿态控制和定位精度,减少数据噪声干扰[superscript:2];
-
航线规划算法:A*算法,自动生成最优巡检航线,支持避障后的航线动态调整,适配复杂巡检场景。
-
-
开发软件与工具:
-
模型训练工具:TensorFlow/PyTorch(云端训练AI模型),结合迁移学习,利用预训练模型微调适配巡检场景,减少数据采集成本;
-
模型压缩工具:TensorFlow Lite Converter,对训练好的模型进行量化、剪枝,降低模型体积和算力消耗,适配嵌入式设备;
-
嵌入式开发工具:VS Code + 交叉编译工具链(ARM GCC),开发嵌入式软件(飞行控制、AI推理、通信模块);
-
地面站软件:QGroundControl(开源无人机地面站软件),用于航线设置、实时监控无人机状态、接收巡检数据,支持数据可视化和报表生成;
-
音视频处理工具:FFmpeg/Gstreamer,处理摄像头采集的图像数据,为AI算法提供标准化输入。
-
(五)通信协议
-
机载内部通信协议:
-
I2C协议:连接STM32H743与MPU-6050(IMU传感器),传输姿态数据[superscript:1];
-
SPI协议:连接瑞芯微RK3588与激光雷达、闪存,传输距离数据和存储数据,通信速率高[superscript:1];
-
UART协议:连接主控制芯片与4G/5G模块、WiFi模块,传输通信数据[superscript:1];
-
uORB协议:作为系统内部消息总线,连接存储、外部通信、飞行控制、驱动等模块,实现数据高效传输[superscript:1];
-
IPC协议:基于Jailhouse虚拟化特性,实现Linux与NuttX双系统的跨核通信,传输AI决策结果与飞行控制指令[superscript:4]。
-
-
无人机与地面站通信协议:
-
MAVLink协议:轻量化无人机通信协议,用于无人机与地面站的指令交互(如航线设置、返航指令)和数据传输(飞行状态、巡检数据),支持UART或UDP接口,是无人机领域的主流通信协议[superscript:1][superscript:5];
-
FastRTPS协议:借助micrortps_bridge,通过UART或UDP实现CDR序列化通信,适用于实时性要求高的场景(如避障指令传输)[superscript:1][superscript:5];
-
HTTP/HTTPS协议:用于巡检数据(图像、报告)的上传和地面站指令的下发,支持加密传输,保障数据安全[superscript:2];
-
UAVCAN协议:基于CAN总线,实现机载设备间的可靠通信,适配航空、机器人等场景,保障数据传输的确定性[superscript:5]。
-
2.4 案例实现步骤描述(含流程图)
本案例实现分为5个核心步骤,从硬件搭建、软件开发到系统调试,全程贴合嵌入式AI开发流程,每一步涉及的流程均绘制流程图,确保步骤清晰、可落地,具体如下:
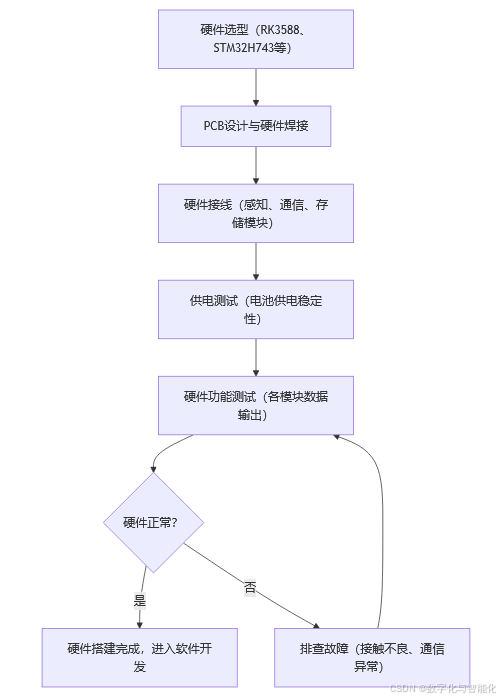
步骤1:硬件搭建与调试(核心:确保算力、感知、通信硬件正常工作)
-
硬件选型与焊接:根据案例需求,选型瑞芯微RK3588(主控制+NPU)、STM32H743(辅助控制)、MPU-6050、激光雷达、高清摄像头、4G/5G模块等组件,设计PCB板,完成硬件焊接,采用单芯片异构架构,简化硬件设计[superscript:4];
-
硬件接线与测试:
-
连接主控制芯片与AI芯片(RK3588内置NPU,无需额外接线,仅需配置驱动);
-
连接主控制芯片、辅助控制芯片与感知硬件(摄像头、激光雷达、IMU),通过I2C/SPI/UART协议实现通信;
-
连接通信模块、存储设备,确保数据传输和存储正常;
-
测试硬件供电:无人机电池供电,测试各硬件模块的供电稳定性,避免低功耗场景下的供电异常。
-
-
硬件调试:排查硬件故障(如接触不良、通信异常),确保各硬件模块能正常输出数据(如摄像头采集图像、激光雷达测量距离、IMU采集姿态数据),通过工具检测各接口的通信速率和数据准确性。
硬件搭建流程图:
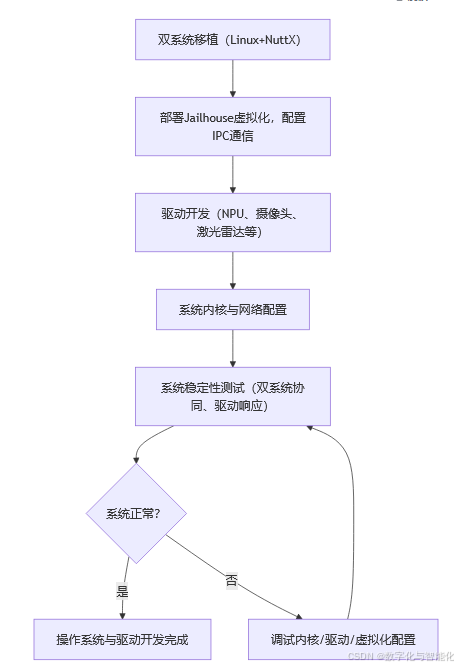
步骤2:操作系统与驱动开发(核心:搭建嵌入式AI运行环境)
-
操作系统移植:
-
将Ubuntu Core(轻量级Linux)移植到瑞芯微RK3588的高性能核,配置系统内核、网络、存储驱动,适配无人机硬件;
-
将NuttX实时操作系统移植到瑞芯微RK3588的专用实时核,移植PX4飞控栈,配置飞行控制相关驱动;
-
部署Jailhouse虚拟化hypervisor,实现双系统的硬件级隔离,配置跨核IPC通信机制。
-
-
驱动开发:开发各硬件模块的驱动程序,包括NPU驱动(适配TensorFlow Lite)、摄像头驱动、激光雷达驱动、IMU驱动、通信模块驱动,确保上层软件能正常调用底层硬件资源;
-
系统调试:测试操作系统的稳定性,确保双系统协同工作正常,驱动程序能正常响应,无死机、卡顿现象,跨核通信延迟≤10ms[superscript:4]。
操作系统与驱动开发流程图:
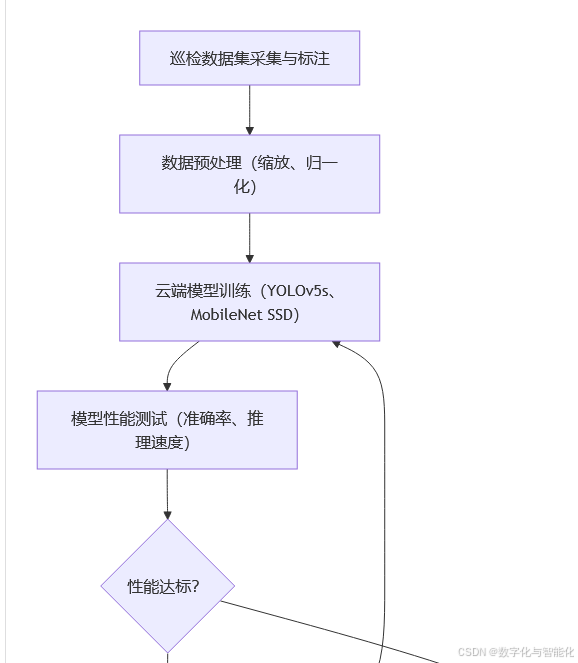
步骤3:AI模型训练与部署(核心:实现嵌入式AI推理功能)
-
数据集采集与预处理:采集巡检场景的图像数据(障碍物、目标对象),包括白天、夜间、复杂天气(雾、雨)下的数据,标注数据(目标类型、位置),预处理数据(缩放、归一化、增强),构建巡检数据集;
-
AI模型训练(云端):
-
基于TensorFlow/PyTorch,训练避障模型(轻量化YOLOv5s)和目标识别模型(MobileNet SSD),结合迁移学习,利用预训练模型微调,提升模型精度和训练效率;
-
测试模型性能:在测试集上验证模型,确保避障识别准确率≥98%,目标识别准确率≥95%,推理速度≥20FPS;
-
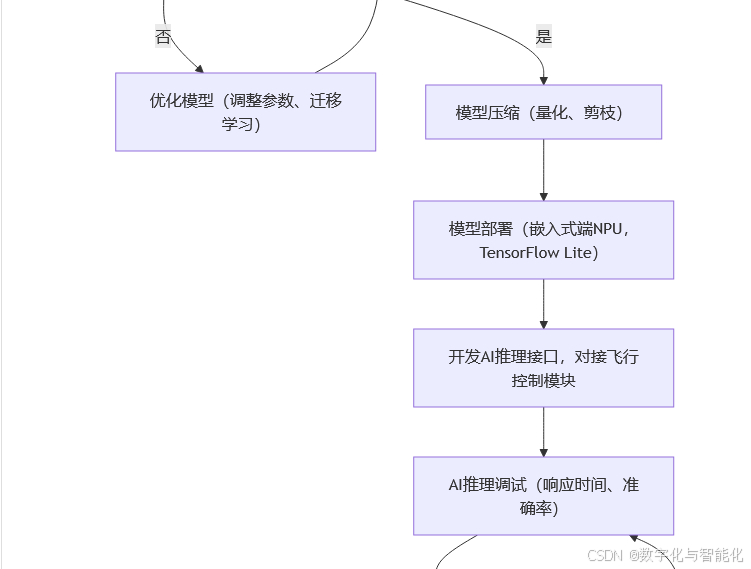
模型压缩:使用TensorFlow Lite Converter对训练好的模型进行量化(将FP32转为INT8)、剪枝,减少模型体积(压缩至100MB以内),降低算力消耗,适配嵌入式设备。
-
-
AI模型部署(嵌入式端):
-
将压缩后的.tflite模型部署到瑞芯微RK3588的NPU中,配置TensorFlow Lite框架,启用NPU硬件加速[superscript:2];
-
开发AI推理接口,实现模型调用(摄像头/激光雷达数据输入→模型推理→结果输出),将推理结果(障碍物位置、目标类型)传递给飞行控制模块[superscript:4]。
-
-
AI模型调试:测试模型在嵌入式端的推理性能,确保响应时间≤100ms,排查推理错误、数据传输异常等问题,优化模型推理效率,适配无人机实时性需求[superscript:3]。
AI模型训练与部署流程图:
步骤4:软件集成与功能开发(核心:实现无人机全流程智能巡检)
-
核心软件开发:
-
飞行控制软件:基于NuttX系统和PX4飞控栈,开发无人机姿态控制、电机驱动、航线规划(A*算法)、应急处理(低电量返航、迫降)功能;
-
AI功能集成:将AI避障、目标识别算法与飞行控制软件集成,实现“AI推理结果→飞行指令”的转换(如识别到障碍物→自动调整航线);
-
数据管理软件:开发数据采集、存储、上传功能,基于SQLite3实现本地数据存储,基于MAVLink/HTTP协议实现数据上传至地面站;
-
地面站软件配置:基于QGroundControl,配置航线设置、实时监控、数据可视化功能,支持多无人机数据管理。
-
-
软件集成:将各模块软件(飞行控制、AI推理、数据管理、通信)集成到嵌入式系统中,通过uORB消息总线实现各模块数据交互,确保软件协同工作[superscript:1];
-
功能测试:
-
单机测试:测试无人机自主起飞、航线规划、避障、目标识别、数据存储与上传功能,验证各功能的稳定性和准确性;
-
场景测试:在户外巡检场景(如高速公路路段),测试无人机在复杂环境下的性能,排查避障不及时、目标漏检等问题。
-
步骤5:系统联调与优化(核心:确保系统稳定、高效运行)
-
系统联调:将硬件、软件、AI模型、通信模块全流程联调,测试无人机巡检全流程(自主起飞→航线规划→避障→目标识别→数据上传→返航),排查系统卡顿、数据丢失、避障失败等问题[superscript:3];
-
性能优化:
-
AI性能优化:调整模型参数,优化NPU算力调度,缩短AI推理响应时间,提升识别准确率;
-
飞行性能优化:调整飞行控制参数,提升无人机姿态稳定性和避障精度,优化航线规划算法,提升巡检效率;
-
通信优化:优化MAVLink/FastRTPS协议参数,提升数据传输速率和稳定性,避免户外强干扰下的通信中断;
-
功耗优化:调整系统运行参数,关闭冗余功能,降低无人机功耗,延长续航时间,适配长时巡检需求。
-
-
稳定性测试:连续运行无人机进行巡检(≥2小时),测试系统的稳定性,确保无死机、无故障,巡检数据完整、准确,满足工业级巡检的可靠性要求[superscript:3];
-
文档整理:整理硬件接线图、软件代码、模型文件、测试报告,形成完整的实战案例文档,便于后期维护和迭代。
2.5 案例总结
本案例基于嵌入式人工智能技术,实现了无人机AI自主避障与目标跟踪巡检系统,采用瑞芯微RK3588单芯片异构架构,结合Linux+NuttX双系统和Jailhouse虚拟化技术,解决了传统无人机巡检的人工依赖、易碰撞、效率低的痛点[superscript:4]。案例中,嵌入式AI模块(NPU+轻量化模型)实现了本地实时推理,无需依赖云端,响应速度快、可靠性高,适配户外复杂巡检场景。
整个案例覆盖了嵌入式人工智能的全技术栈(硬件、操作系统、AI框架、算法、通信),完整呈现了从硬件搭建、软件开发到系统联调的全流程,所涉及的芯片、系统、软件、协议均为当前嵌入式AI与无人机领域的主流技术,具备极强的实战参考价值,可直接适配高速公路、电力、园区等工业级巡检场景,也可基于本案例进行功能扩展(如多机协同巡检、AI故障预警。
三、嵌入式人工智能发展趋势与挑战
3.1 发展趋势
-
算力提升与低功耗化:AI芯片(NPU)向高算力、低功耗方向发展,如存算一体芯片、类脑芯片,进一步适配嵌入式设备的资源约束[superscript:2];
-
模型轻量化升级:更高效的模型压缩技术(如知识蒸馏、量化),以及专用轻量化模型的研发,让复杂AI算法(如Transformer)能在低算力设备上运行[superscript:2];
-
边缘-云端协同:简单AI任务本地处理,复杂任务(如大规模数据训练、多设备协同)调用云端算力,提升系统灵活性和扩展性[superscript:2];
-
多场景适配:嵌入式AI将渗透到更多领域,如无人机蜂群、工业机器人、智能医疗设备,实现“一机多用”的软件定义功能[superscript:3][superscript:4];
-
自监督学习与在线学习:设备在运行中自动更新模型,通过新场景数据持续优化识别能力,减少人工维护成本[superscript:2]。
3.2 面临的挑战
-
算力与能效平衡:如何在低功耗嵌入式设备上运行复杂AI模型,实现算力与功耗的最优平衡,是当前的核心挑战[superscript:2];
-
模型适配难度:不同嵌入式设备的算力、存储资源差异大,实现“一次训练,多端部署”的自动化工具链仍需完善[superscript:2];
-
实时性与安全性冲突:本地化计算需兼顾数据加密和实时响应,尤其在工业控制、无人机等场景,安全性和实时性难以兼顾[superscript:2];
-
开发门槛较高:嵌入式AI开发需要同时掌握嵌入式系统、AI算法、硬件开发等多领域知识,对开发者的综合能力要求较高[superscript:2];
-
抗干扰能力不足:户外场景(如强电磁干扰、恶劣天气)下,嵌入式AI系统的稳定性和可靠性面临考验,需进一步优化抗干扰设计[superscript:3]。
嵌入式人工智能是AI技术落地的核心载体,其核心价值在于“将智能赋予硬件”,实现设备的本地化、实时化、智能化决策,打破了传统嵌入式设备的功能局限[superscript:2]。本文通过系统解析嵌入式人工智能的定义、架构、技术特点,结合无人机AI自主巡检实战案例,完整呈现了嵌入式AI的技术落地流程,涵盖硬件选型、系统移植、AI模型训练与部署、软件集成等全环节,所涉及的技术和组件均贴合当前实战需求。
无人机作为嵌入式人工智能的典型应用场景,其智能化升级(自主避障、目标跟踪)离不开嵌入式AI技术的支撑,本案例的实现的不仅解决了传统巡检的痛点,也为其他嵌入式AI场景(如工业机器人、智能交通)提供了参考范式[superscript:3][superscript:4]。随着AI芯片、轻量化模型、虚拟化技术的不断发展,嵌入式人工智能将迎来更快的发展,逐步渗透到各行各业,推动“万物智能”时代的到来。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)