镜像视界智能安防空间计算引擎——以 Pixel-to-Space 为核心的视频空间智能计算平台
镜像视界智能安防空间计算引擎
——以 Pixel-to-Space 为核心的视频空间智能计算平台

一、技术背景:从视频数据到空间智能
在过去二十多年中,视频监控系统经历了多次技术升级。从最初的模拟监控系统到数字视频系统,再到具备人工智能识别能力的智能视频系统,视频技术已经成为城市安全管理的重要基础设施。
然而,即使在当前的智能视频系统中,大多数视频平台仍然停留在 二维图像分析阶段。系统能够识别视频画面中的人员、车辆或物体,但这些识别结果通常只是图像中的位置,而不是现实空间中的真实坐标。
例如,在传统系统中,系统可能识别出视频中的一个人,其位置为:
x = 300
y = 420
但这个坐标只是视频画面中的像素位置,并不能反映目标在现实空间中的真实位置。
这就导致一个问题:
视频系统虽然能够“看见目标”,却无法真正“理解空间”。
在城市级应用中,仅仅知道目标在视频画面中的位置是不够的。管理人员更关心的是:
目标在现实空间中的位置在哪里
目标正在向哪个方向移动
目标距离某个重要区域有多远
目标未来可能进入哪个区域
因此,现代视频系统需要从 二维图像分析系统 升级为 空间智能系统。
镜像视界提出的 智能安防空间计算引擎(Spatial Computing Engine),正是为了解决这一问题。
该引擎通过空间计算技术,将视频数据转换为真实空间信息,使视频系统具备 空间认知能力。
通过这一技术体系,视频系统能够实现:
从像素到空间坐标
从视频画面到空间轨迹
从视频监控到空间智能
这一理念也被镜像视界概括为:
Pixel-to-Space(像素即坐标)
二、空间计算引擎总体架构
镜像视界空间计算引擎是整个系统的技术底座。
系统总体架构主要包括以下核心模块:
1
视频数据接入模块
2
摄像机空间标定模块
3
像素坐标反演模块
4
矩阵视频融合模块
5
三维空间重建模块
6
空间数据计算模块
7
空间可视化模块
这些模块共同构建完整的空间计算平台。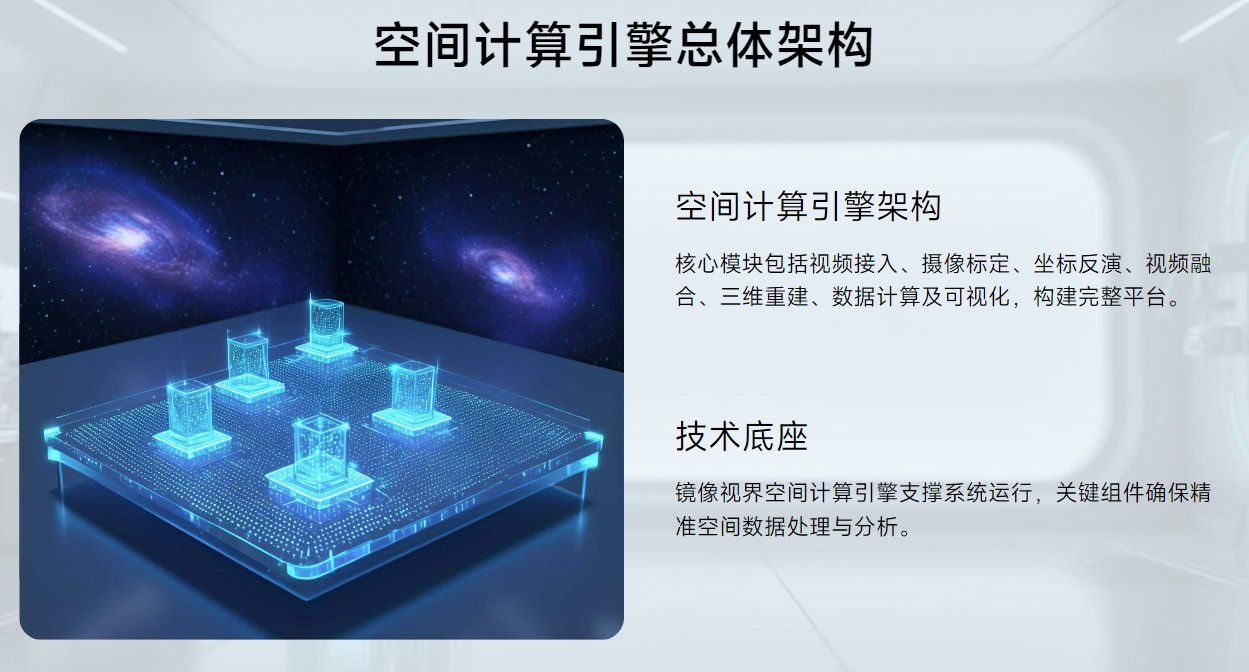
三、视频数据接入系统
空间计算引擎首先需要接入大量视频数据。
系统支持多种视频接入方式,包括:
RTSP 视频流
GB28181 视频协议
ONVIF 摄像机
RTMP 视频流
通过统一视频接入平台,系统可以汇聚来自不同来源的视频资源,例如:
城市视频监控系统
交通监控系统
园区监控系统
港口监控系统
在城市级系统中,视频设备数量可能达到数万甚至数十万台。因此系统需要具备高性能视频处理能力。
镜像视界系统采用分布式架构,使视频数据可以在多个服务器之间进行处理,从而保证系统稳定运行。
四、摄像机空间标定技术
要实现 Pixel-to-Space 技术,首先需要对摄像机进行空间标定。
摄像机空间标定的目标是确定摄像机在现实空间中的位置和姿态。
标定参数通常包括:
摄像机安装坐标
摄像机朝向角度
摄像机俯仰角
镜头焦距
视场角
通过这些参数,系统可以建立摄像机空间模型。
例如:
摄像机安装在建筑物顶部
高度 15 米
朝向东南方向
俯仰角 30°
系统可以根据这些参数计算摄像机的可视范围。
通过这一技术,系统能够准确判断摄像机能够观察到的区域。
五、Pixel-to-Space 像素坐标反演技术
Pixel-to-Space 是镜像视界空间计算引擎的核心技术之一。
该技术的核心思想是:
将视频画面中的像素位置转换为真实空间坐标。
在视频画面中,目标的位置通常表示为:
(x , y)
其中:
x 表示水平像素位置
y 表示垂直像素位置
通过摄像机空间模型,系统可以计算目标在真实空间中的位置:
(X , Y , Z)
这种计算通常基于以下技术:
透视几何计算
摄像机投影模型
空间标定参数
通过这些计算,系统可以获得目标真实空间坐标。
例如:
某目标空间位置为:
X = 125.4 米
Y = 48.7 米
Z = 0 米
这样系统就能够知道目标在现实空间中的具体位置。
六、矩阵视频融合技术
在城市环境中,通常会有多台摄像机同时观察同一目标。
镜像视界提出 矩阵视频融合技术(Matrix Video Fusion)。
该技术通过融合多个摄像机的视频数据,提高空间定位精度。
例如:
摄像机 A
观察目标
摄像机 B
也观察目标
系统可以通过 三角测量(Triangulation) 计算目标位置。
通过多个摄像机交叉计算,可以显著提高定位精度。
这种方法在复杂环境中非常有效。
七、三维空间重建技术
除了目标定位之外,镜像视界系统还支持 三维空间重建技术。
通过多摄像机数据,系统可以重建场景三维模型。
例如:
道路结构
建筑结构
公共空间结构
在三维场景中,系统可以展示:
摄像机位置
目标位置
目标轨迹
通过三维可视化界面,管理人员可以更加直观地理解空间环境。
八、空间数据计算系统
在获得空间坐标之后,系统可以进行各种空间计算。
例如:
目标之间距离计算
目标与区域距离计算
目标运动速度计算
系统还可以判断:
目标是否进入重点区域
目标是否接近危险区域
这些计算对于安全管理具有重要意义。
九、视频孪生系统
在空间计算引擎基础上,镜像视界系统可以构建 视频孪生系统(Video Digital Twin)。
视频孪生系统通过视频数据实时更新空间模型。
系统可以在虚拟空间中展示真实世界的运行状态。
例如:
车辆位置
人员位置
设备状态
通过这一技术,可以构建城市级数字孪生平台。
十、技术应用场景
空间计算引擎可以应用于多个领域。
城市公共安全
实时追踪重点目标。
智慧交通
分析车辆运行状态。
港口管理
监控设备与车辆位置。
园区管理
管理人员与设备活动。
应急管理
分析突发事件现场情况。
十一、技术价值
空间计算引擎具有重要价值。
第一
实现视频数据空间化。
第二
提高目标定位精度。
第三
支持城市级智能分析。
第四
构建空间智能平台。
十二、未来发展方向
未来空间计算技术将进一步发展。
例如:
城市数字孪生系统
AI空间预测系统
智能城市操作系统
视频系统将逐渐演变为 城市空间智能基础设施。
十三、本章总结
镜像视界智能安防空间计算引擎通过 Pixel-to-Space 技术、矩阵视频融合技术以及三维空间重建技术,实现了视频系统向空间智能系统的升级。
这一技术体系为城市公共安全、智慧交通和数字城市建设提供了重要技术基础。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 7
7 0
0- 0



 已为社区贡献92条内容
已为社区贡献92条内容

所有评论(0)