探索双馈电机的模型预测控制
双馈电机模型预测控制
在电力传动领域,双馈电机因其独特的结构和性能优势,被广泛应用于风力发电、工业调速等诸多场景。而模型预测控制(MPC)作为一种先进的控制策略,为双馈电机的高效、精准控制带来了新的思路和方法。今天咱就来深入唠唠双馈电机的模型预测控制。
双馈电机基本原理回顾
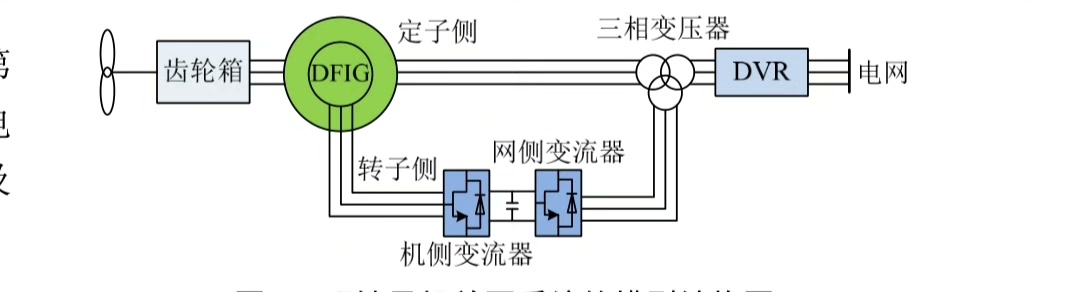
双馈电机本质上是绕线转子异步电机,它的定子绕组直接接入电网,而转子绕组通过双向变流器与电网相连。这种结构使得电机的转速和无功功率能够灵活调节。简单来说,双馈电机可以在亚同步、同步和超同步三种状态下运行,适应不同的工况需求。
模型预测控制简介
模型预测控制是基于系统的预测模型,通过滚动优化和反馈校正来实现对系统的控制。它的核心思想就是预测系统未来的行为,并基于预测结果在每个采样时刻计算出最优控制序列。与传统的PI控制相比,MPC不需要复杂的控制器参数整定,并且能同时处理多个控制目标和约束条件。
双馈电机的模型预测控制实现
建立双馈电机模型
以三相静止坐标系下的双馈电机数学模型为例,定子电压方程可以表示为:
\[
\begin{align*}
u{sa}&=R{s}i{sa}+\frac{d\psi{sa}}{dt}\\
u{sb}&=R{s}i{sb}+\frac{d\psi{sb}}{dt}\\
u{sc}&=R{s}i{sc}+\frac{d\psi{sc}}{dt}
\end{align*}
\]
双馈电机模型预测控制
这里 \(u{s}\) 是定子电压,\(i{s}\) 是定子电流,\(R{s}\) 是定子电阻,\(\psi{s}\) 是定子磁链。转子电压方程类似。这个模型描述了双馈电机电气量之间的动态关系,是后续模型预测控制的基础。
预测模型与滚动优化
在模型预测控制中,我们要根据双馈电机模型预测未来几个时刻的系统状态。比如预测定子电流、转子磁链等变量。假设预测时域为 \(Np\),控制时域为 \(Nc\)(\(Nc \leq Np\))。在每个采样时刻 \(k\),我们要寻找一组最优的控制序列 \(u(k), u(k + 1), \cdots, u(k + N_c - 1)\),使得目标函数最小。目标函数可以定义为:
\[
J=\sum{j = 1}^{Np}\left[\left(i{s}^{*}(k + j)-i{s}(k + j)\right)^2+\lambda\left(u(k + j - 1)\right)^2\right]
\]
这里 \(i_{s}^{*}\) 是定子电流的参考值,\(\lambda\) 是权重系数,用于平衡跟踪误差和控制量变化。通过求解这个优化问题,得到当前时刻的最优控制量 \(u(k)\)。
下面是一段简化的Python代码来演示这个滚动优化过程(仅为概念示意,实际应用需结合具体电机参数和更完善模型):
import numpy as np
# 假设的双馈电机模型函数,根据当前状态和控制量预测下一时刻状态
def predict_system_state(state, control, dt):
# 这里是简单示意,实际需按电机模型详细计算
new_state = state + control * dt
return new_state
# 目标函数
def cost_function(state_ref, predicted_states, controls, lambda_):
cost = 0
for i in range(len(predicted_states)):
cost += (state_ref - predicted_states[i]) ** 2 + lambda_ * controls[i] ** 2
return cost
# 滚动优化
def receding_horizon_optimization(state_current, state_ref, dt, Np, Nc, lambda_):
optimal_controls = []
for k in range(Nc):
min_cost = float('inf')
optimal_control = 0
for control_candidate in np.arange(-1, 1, 0.01):
predicted_states = []
state_temp = state_current
controls_temp = optimal_controls.copy()
controls_temp.append(control_candidate)
for j in range(Np):
if j < Nc:
state_temp = predict_system_state(state_temp, controls_temp[j], dt)
else:
state_temp = predict_system_state(state_temp, controls_temp[-1], dt)
predicted_states.append(state_temp)
cost = cost_function(state_ref, predicted_states, controls_temp, lambda_)
if cost < min_cost:
min_cost = cost
optimal_control = control_candidate
optimal_controls.append(optimal_control)
state_current = predict_system_state(state_current, optimal_control, dt)
return optimal_controls[0]
# 参数设置
dt = 0.01 # 采样时间
Np = 5 # 预测时域
Nc = 3 # 控制时域
lambda_ = 0.1 # 权重系数
state_current = 0 # 当前状态
state_ref = 1 # 参考状态
optimal_control = receding_horizon_optimization(state_current, state_ref, dt, Np, Nc, lambda_)
print("Optimal control at current step:", optimal_control)反馈校正
实际系统中存在各种干扰和模型误差,所以单纯依靠预测模型是不够的。反馈校正环节就是通过实时测量系统的输出,如定子电流、转速等,与预测值进行比较,根据偏差对预测模型进行修正,从而提高控制精度。例如,如果测量得到的定子电流与预测值有偏差,我们可以调整模型中的参数,使得下一次预测更加准确。
双馈电机模型预测控制的优势与挑战
优势方面,模型预测控制能快速跟踪参考值变化,对系统参数变化和外部干扰具有较强的鲁棒性。而且可以方便地处理多目标控制问题,比如同时实现转速跟踪和无功功率调节。
然而,它也面临一些挑战。首先,模型预测控制需要在线求解优化问题,计算量较大,对控制器的硬件性能要求较高。其次,准确的电机模型是实现良好控制效果的前提,但实际电机运行过程中参数会发生变化,如何自适应调整模型参数也是需要解决的问题。
总之,双馈电机的模型预测控制虽然面临一些挑战,但凭借其独特的优势,在未来的电力传动领域仍具有广阔的应用前景,值得我们不断探索和优化。希望今天的分享能让大家对双馈电机的模型预测控制有更深入的了解,欢迎一起交流探讨。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)