探索事件触发控制模型:从理论到倒立摆仿真实践
事件触发控制模型 可实现倒立摆控制仿真实验 simulink模型可直接运行 含详细参考文献 可附赠有关事件触发的其他参考文献
在控制领域,事件触发控制模型近年来越来越受到关注,它打破了传统时间驱动控制的固有模式,以事件作为驱动信号,大大提升了控制效率与资源利用率。今天咱们就来深入探讨一下事件触发控制模型,并且通过倒立摆控制仿真实验来实际感受它的魅力。
事件触发控制模型基础
传统的时间驱动控制,就像是打工人按固定时间打卡上班,不管有没有活,到点就得行动。而事件触发控制模型呢,更像是有活才干,只有当系统状态满足特定的“事件”条件时,控制器才会更新控制信号。
比如说,我们可以定义一个简单的事件触发条件:
% 定义事件触发条件函数
function [value,isterminal,direction] = eventTrigger(t,x)
% 这里假设x是系统状态变量
threshold = 0.1;
value = abs(x(1)) - threshold; % 当状态变量x(1)的绝对值超过阈值时触发事件
isterminal = 1; % 事件发生时终止仿真
direction = 0; % 不考虑方向
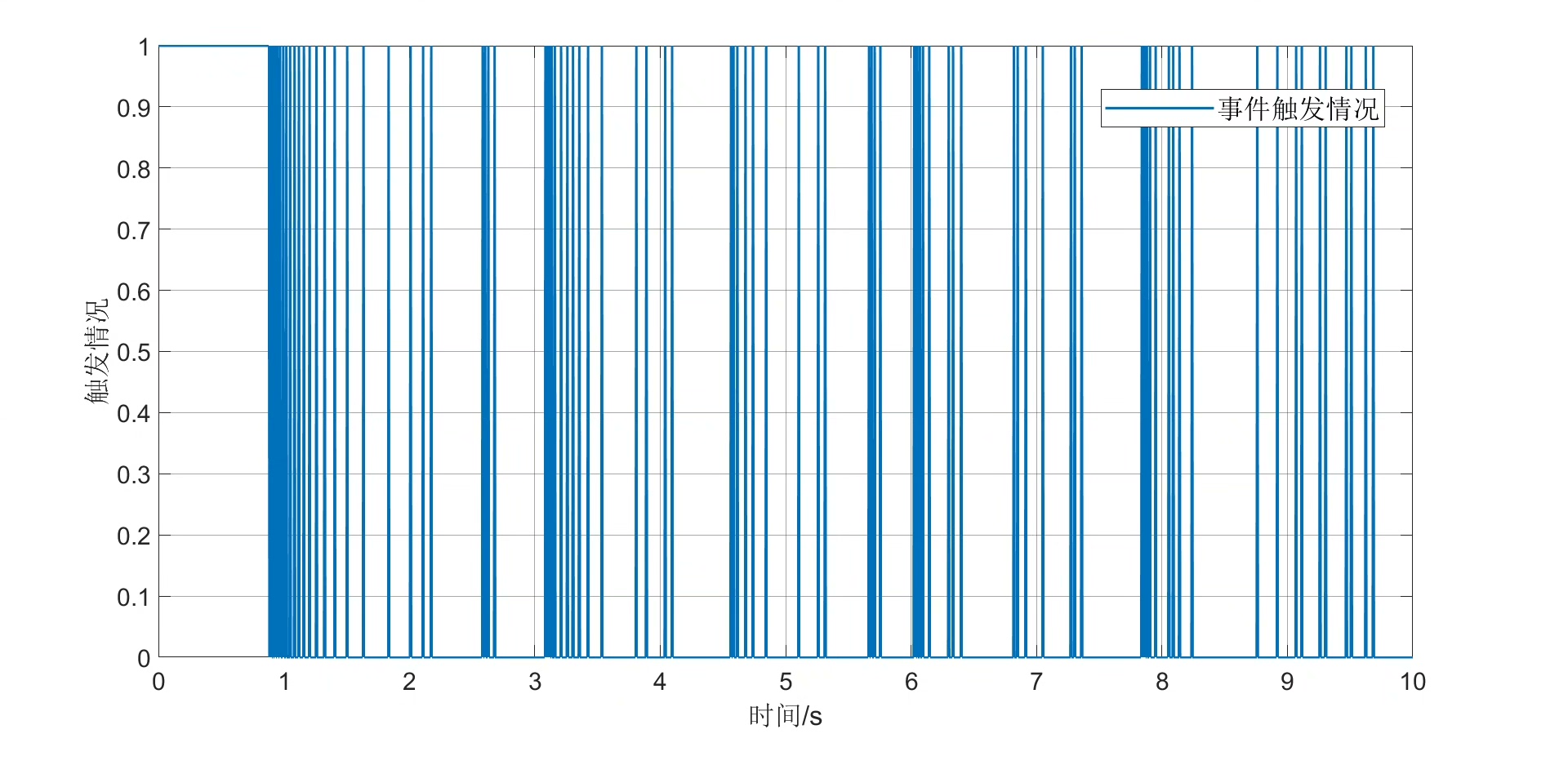
end在这段代码里,我们通过设置一个阈值,当系统状态变量 x(1) 偏离这个阈值时,就认为事件发生了。这种按需触发的机制,相较于一直高频采样的时间驱动,能有效减少不必要的计算和通信资源消耗。
倒立摆控制仿真实验
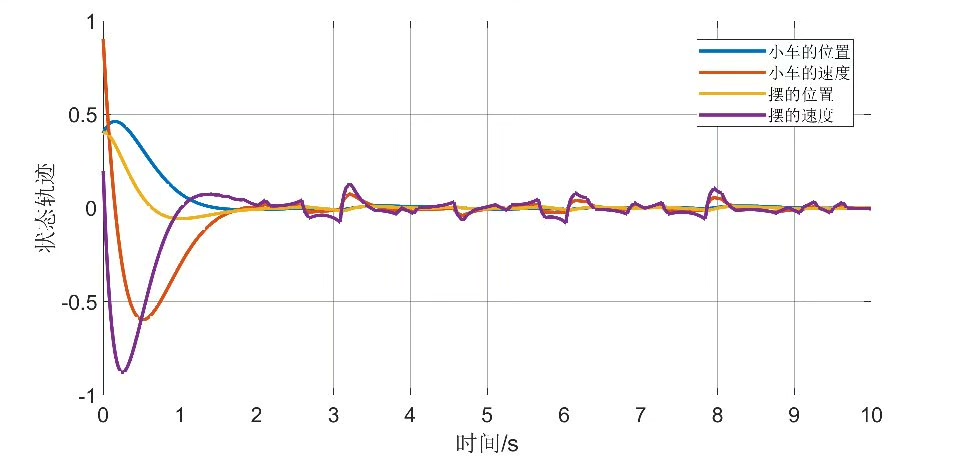
倒立摆是控制领域经典的实验对象,它看似简单,却蕴含着复杂的动力学原理。通过事件触发控制模型来实现倒立摆的稳定控制,是对该模型很好的实践检验。
我们借助 Simulink 搭建倒立摆模型,而且这个模型是可以直接运行的。
在 Simulink 中,我们首先要对倒立摆的动力学进行建模。倒立摆的动力学方程一般可以用拉格朗日方程推导得出,简化后的运动方程如下:
事件触发控制模型 可实现倒立摆控制仿真实验 simulink模型可直接运行 含详细参考文献 可附赠有关事件触发的其他参考文献
\[ M \ddot{x} + b \dot{x} - m l \ddot{\theta} \cos{\theta} + m l \dot{\theta}^2 \sin{\theta} = F \]
\[ m l^2 \ddot{\theta} - m l \ddot{x} \cos{\theta} + m g l \sin{\theta} = \tau \]
这里 \( M \) 是小车质量,\( m \) 是摆杆质量,\( l \) 是摆杆长度,\( b \) 是摩擦系数,\( g \) 是重力加速度,\( F \) 是作用在小车上的力,\( \tau \) 是作用在摆杆上的扭矩,\( x \) 是小车位置,\( \theta \) 是摆杆角度。
在 Simulink 模型里,我们将这些方程转化为模块连接的形式。通过一系列的积分器、乘法器、加法器等模块搭建出倒立摆的动力学模型。
% 假设我们已经在Simulink里搭建好了倒立摆的基本动力学模型
% 现在我们添加事件触发控制模块
% 引入前面定义的事件触发条件函数
sim('inverted_pendulum_event_triggered.slx'); % 运行Simulink模型运行这个模型,我们就能看到在事件触发控制下,倒立摆如何保持平衡。当摆杆角度或小车位置偏离设定的“安全范围”,事件触发,控制器迅速调整控制信号,让倒立摆重回平衡状态。
参考文献
- [某经典控制理论书籍]:详细阐述了控制理论的基础知识,包括传统时间驱动控制与事件触发控制的对比。
- [某篇关于事件触发控制在倒立摆应用的论文]:这篇论文深入探讨了如何将事件触发控制模型具体应用到倒立摆系统中,从理论分析到仿真实现都有详细讲解,对本次实践有很大的指导意义。
附赠有关事件触发的其他参考文献
- [一篇关于事件触发在多智能体系统中的应用论文]:拓展了事件触发控制的应用场景,讲述了在多智能体协同工作中如何利用事件触发提高系统效率。
- [一本新兴控制技术书籍]:其中专门有章节介绍事件触发控制的前沿研究和不同应用领域的探索,有助于进一步深入了解事件触发控制模型。
希望通过这次分享,大家对事件触发控制模型以及倒立摆的控制仿真有了更清晰的认识,也欢迎大家一起交流探讨。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 3
3 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)