锂电池SOC估计:从算法到代码实践
锂电池soc估计 遗忘因子(FFRLS)、遗传算法(AGA)参数辨识 AEKF UKF MIUKF等卡尔曼滤波算法估计SOC matlab/simulink代码及模型 多种工况数据
在锂电池管理系统(BMS)中,准确估计电池的荷电状态(State of Charge,SOC)至关重要,它直接关系到电池的使用效率、安全性以及寿命预测。今天咱们就深入探讨下锂电池SOC估计相关的一些热门方法,从遗忘因子递推最小二乘法(FFRLS)、遗传算法(AGA)参数辨识,到AEKF、UKF、MIUKF等卡尔曼滤波算法,再配合Matlab/Simulink代码及模型以及多种工况数据来全方位剖析。
遗忘因子递推最小二乘法(FFRLS)与遗传算法(AGA)参数辨识
FFRLS
FFRLS是一种用于系统参数估计的重要方法。在锂电池SOC估计场景下,其核心思想是通过不断更新数据来调整参数估计值,同时利用遗忘因子来弱化旧数据的影响,使得估计能更好地适应系统的动态变化。
来看一段简单的FFRLS伪代码示例(Matlab风格):
% 初始化参数
lambda = 0.98; % 遗忘因子
P = 1000 * eye(n); % 协方差矩阵初始化
theta = zeros(n, 1); % 参数向量初始化
for k = 1:length(u)
phi = [u(k); y(k - 1)]; % 回归向量
K = P * phi / (lambda + phi' * P * phi); % 增益向量
theta = theta + K * (y(k) - phi' * theta); % 参数更新
P = (1 / lambda) * (P - K * phi' * P); % 协方差矩阵更新
end这段代码中,lambda是遗忘因子,它决定了旧数据被遗忘的速度。每一次循环,我们根据新的输入u(k)和输出y(k)来更新参数向量theta和协方差矩阵P。通过调整遗忘因子lambda,可以平衡对新数据的跟踪能力和对噪声的抑制能力。
AGA
遗传算法(AGA)则是一种模拟生物进化过程的全局优化算法。在锂电池SOC估计里,我们可以用它来寻找电池模型的最优参数。
以下是一个简单的AGA寻找电池内阻R和电容C的Matlab伪代码示例:
% 初始化种群
pop_size = 50; % 种群大小
chrom_length = 2; % 染色体长度(对应R和C两个参数)
pop = rand(pop_size, chrom_length); % 随机生成初始种群
for generation = 1:max_generations
fitness = zeros(pop_size, 1);
for i = 1:pop_size
R = pop(i, 1);
C = pop(i, 2);
% 根据R和C计算模型输出与实际数据的误差,作为适应度
fitness(i) = calculate_fitness(R, C, measured_data);
end
% 选择、交叉、变异操作
new_pop = selection(pop, fitness);
new_pop = crossover(new_pop);
new_pop = mutation(new_pop);
pop = new_pop;
end
% 得到最优参数
best_R = pop(best_index, 1);
best_C = pop(best_index, 2);这段代码首先随机生成一个种群,每个个体(染色体)包含两个参数(R和C)。在每一代中,计算每个个体的适应度(与实际数据的误差越小适应度越高),然后通过选择、交叉、变异操作生成新的种群。经过多代进化后,就能得到最优的参数。
AEKF、UKF、MIUKF等卡尔曼滤波算法估计SOC
AEKF(扩展卡尔曼滤波)
AEKF是将非线性系统在当前估计值附近进行线性化,然后应用卡尔曼滤波。对于锂电池这种非线性系统,它能有效地估计SOC。
Matlab示例代码(简单框架):
% 初始化
x_hat = initial_state; % 初始状态估计
P = initial_covariance; % 初始协方差
for k = 1:length(z)
% 预测步骤
x_hat_minus = f(x_hat, u(k)); % 状态转移函数
F = jacobian_f(x_hat, u(k)); % 状态转移函数的雅可比矩阵
Q = process_noise_covariance;
P_minus = F * P * F' + Q;
% 更新步骤
H = jacobian_h(x_hat_minus); % 观测函数的雅可比矩阵
R = measurement_noise_covariance;
K = P_minus * H' / (H * P_minus * H' + R);
x_hat = x_hat_minus + K * (z(k) - h(x_hat_minus));
P = (eye(size(P)) - K * H) * P_minus;
end在这段代码中,f是状态转移函数,h是观测函数。通过预测和更新两个步骤,不断修正SOC的估计值。AEKF通过对非线性函数进行线性化处理,虽然简单直接,但在强非线性情况下,线性化误差可能导致估计精度下降。
UKF(无迹卡尔曼滤波)
UKF则采用一种无迹变换,通过一组sigma点来近似非线性系统的分布,从而避免了复杂的雅克比矩阵计算,在非线性系统估计中表现更优。
下面是UKF的简单Matlab代码框架:
% 初始化
x_hat = initial_state;
P = initial_covariance;
lambda = alpha^2 * (n + kappa) - n; % 尺度参数
for k = 1:length(z)
% 计算sigma点
sigma_points = calculate_sigma_points(x_hat, P, lambda);
% 预测步骤
x_hat_minus = predict_sigma_points(sigma_points, u(k));
P_minus = predict_covariance(sigma_points, x_hat_minus, Q, lambda);
% 更新步骤
y = z(k) - h(sigma_points);
S = calculate_S(y, R, lambda);
K = calculate_K(P_minus, y, S, lambda);
x_hat = x_hat_minus + K * y;
P = P_minus - K * S * K';
endUKF通过巧妙的sigma点采样和计算,能更准确地估计非线性系统的状态,尤其适用于锂电池这种复杂的非线性系统。
MIUKF(容积卡尔曼滤波)
MIUKF是基于容积准则的卡尔曼滤波,它通过选择特定的积分点来近似非线性变换的均值和协方差,在一些情况下比UKF有更好的数值稳定性和估计精度。
锂电池soc估计 遗忘因子(FFRLS)、遗传算法(AGA)参数辨识 AEKF UKF MIUKF等卡尔曼滤波算法估计SOC matlab/simulink代码及模型 多种工况数据
其代码实现与UKF类似,但积分点的选取和计算方式有所不同:
% 初始化
x_hat = initial_state;
P = initial_covariance;
for k = 1:length(z)
% 计算容积点
cubature_points = calculate_cubature_points(x_hat, P);
% 预测步骤
x_hat_minus = predict_cubature_points(cubature_points, u(k));
P_minus = predict_covariance(cubature_points, x_hat_minus, Q);
% 更新步骤
y = z(k) - h(cubature_points);
S = calculate_S(y, R);
K = calculate_K(P_minus, y, S);
x_hat = x_hat_minus + K * y;
P = P_minus - K * S * K';
endMIUKF在处理高维非线性系统时,可能展现出比UKF更优的性能,为锂电池SOC的精确估计提供了新的思路。
Matlab/Simulink代码及模型与多种工况数据
有了上述算法,我们可以在Matlab/Simulink中搭建完整的锂电池SOC估计模型。利用Simulink丰富的模块库,可以直观地构建电池模型、算法模块以及数据输入输出模块。
在模型搭建过程中,我们要充分考虑多种工况数据,比如城市工况、高速工况、启停工况等。不同工况下,电池的充放电特性差异很大,这些数据可以通过实际测试或者从公开数据库获取。
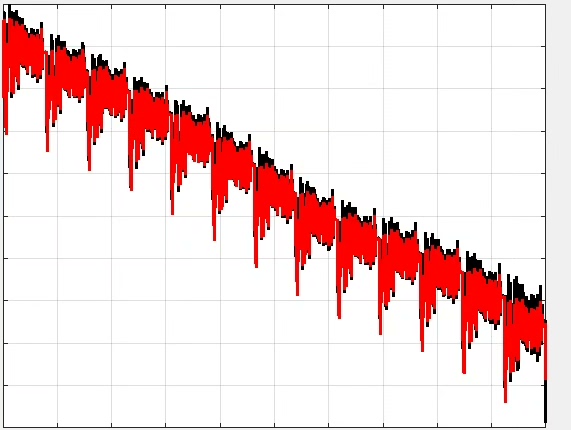
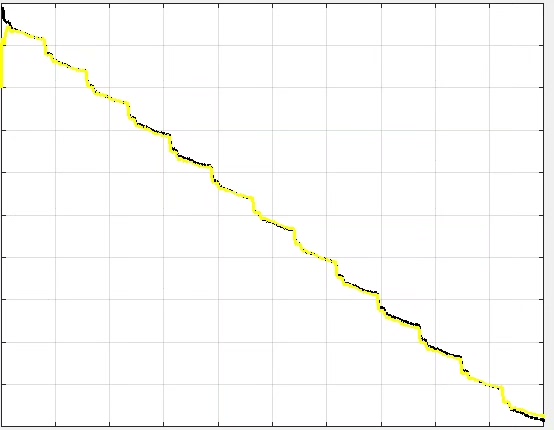
例如,在城市工况下,频繁的启停和低速行驶使得电池的充放电电流变化频繁且幅度较大;而高速工况下,电流相对稳定但持续放电功率较高。将这些不同工况数据输入到我们搭建的模型中,可以验证各种算法在实际复杂情况下的SOC估计精度。
通过在Matlab/Simulink中的不断调试和优化,结合不同算法和多种工况数据,我们就能逐步实现高精度的锂电池SOC估计,为锂电池的高效、安全使用提供有力支持。
总之,锂电池SOC估计是一个复杂但充满挑战与机遇的领域,通过综合运用FFRLS、AGA以及各种卡尔曼滤波算法,配合Matlab/Simulink的强大工具和丰富的工况数据,我们能在这一领域不断取得新的突破。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)