倒立摆的优雅舞步:用代码解读事件触发模型的魔法
【模型+参考文献】事件触发模型 基于倒立摆matlab仿真 模型为状态空间形式 事件触发机制可自行调节参数
在控制理论的王国里,倒立摆是一个令人着迷的存在。它就像一个不稳定的醉汉,随时可能倾倒,却又能在控制算法的引导下优雅起舞。今天,我们就来探索这个神奇的系统,看看它是如何在代码的世界里实现自我平衡的。
一、倒立摆的数学语言:状态空间模型的优雅表达
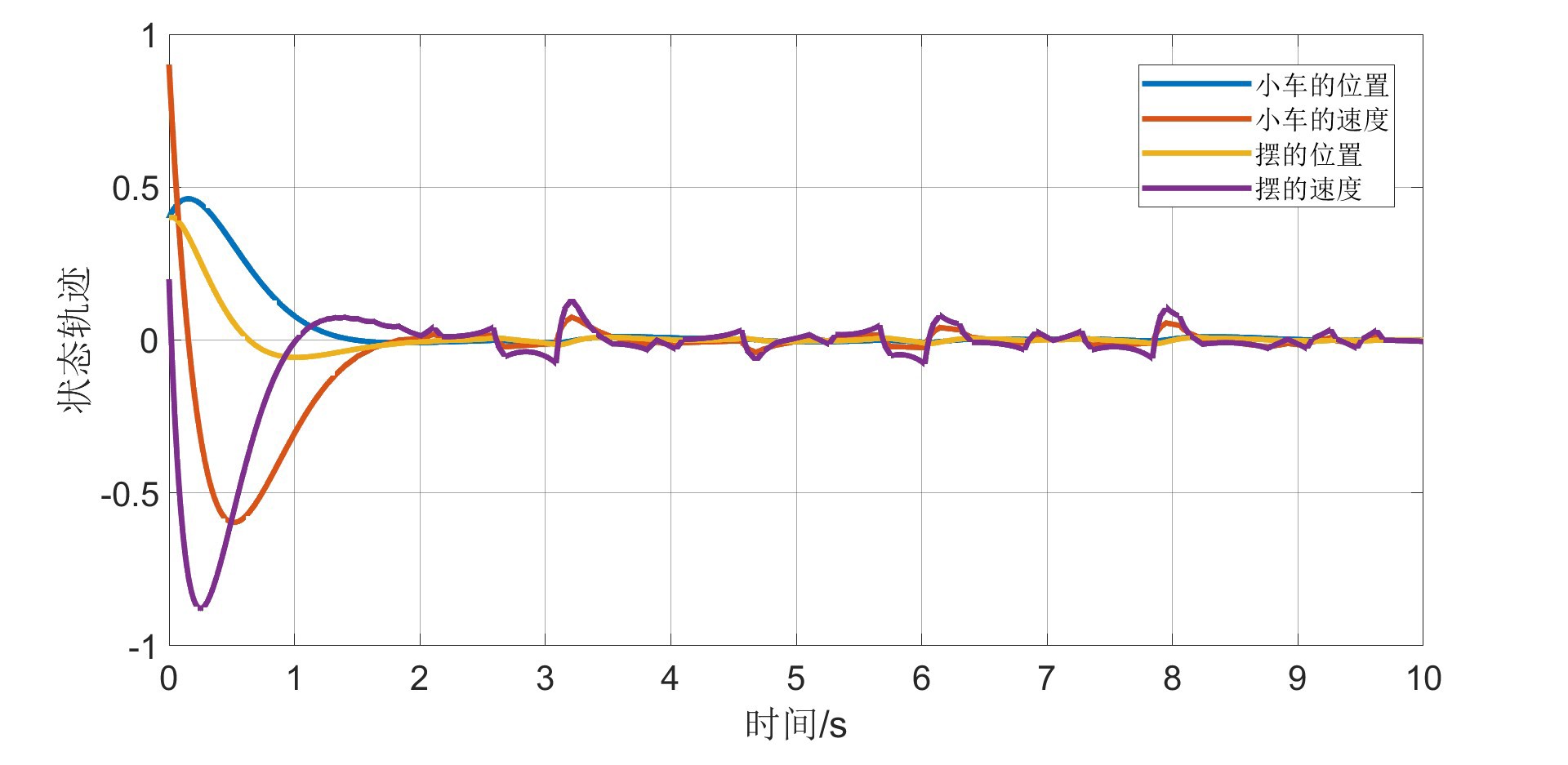
在控制理论中,倒立摆通常被建模为一个四阶非线性系统。为了便于分析和控制,我们需要将其线性化,并用状态空间模型来描述。状态空间模型由四个状态变量组成:摆杆的角度、小车的位置、摆杆的角速度以及小车的速度。
状态空间模型的建立过程就像解一道物理题,我们需要考虑重力、摩擦力以及控制力的作用。通过拉格朗日方程,我们可以推导出系统的动力学方程。然后,通过泰勒展开等方法将非线性方程线性化,得到一个线性状态空间模型。
线性化的状态空间模型可以表示为:
\[
\begin{cases}
\dot{x} = Ax + Bu \\
y = Cx + Du
\end{cases}
\]
其中,\( A \) 是系统矩阵,\( B \) 是输入矩阵,\( C \) 是输出矩阵,\( D \) 是直接传递矩阵。这些矩阵的元素由倒立摆的物理参数决定,比如摆杆的长度、小车的质量等。
二、事件触发机制:让控制更智能
传统的控制方法通常采用固定频率的采样,这种方式在某些场景下可能效率不高。事件触发机制则是一种更智能的控制策略,它可以根据系统的状态动态调整采样频率。
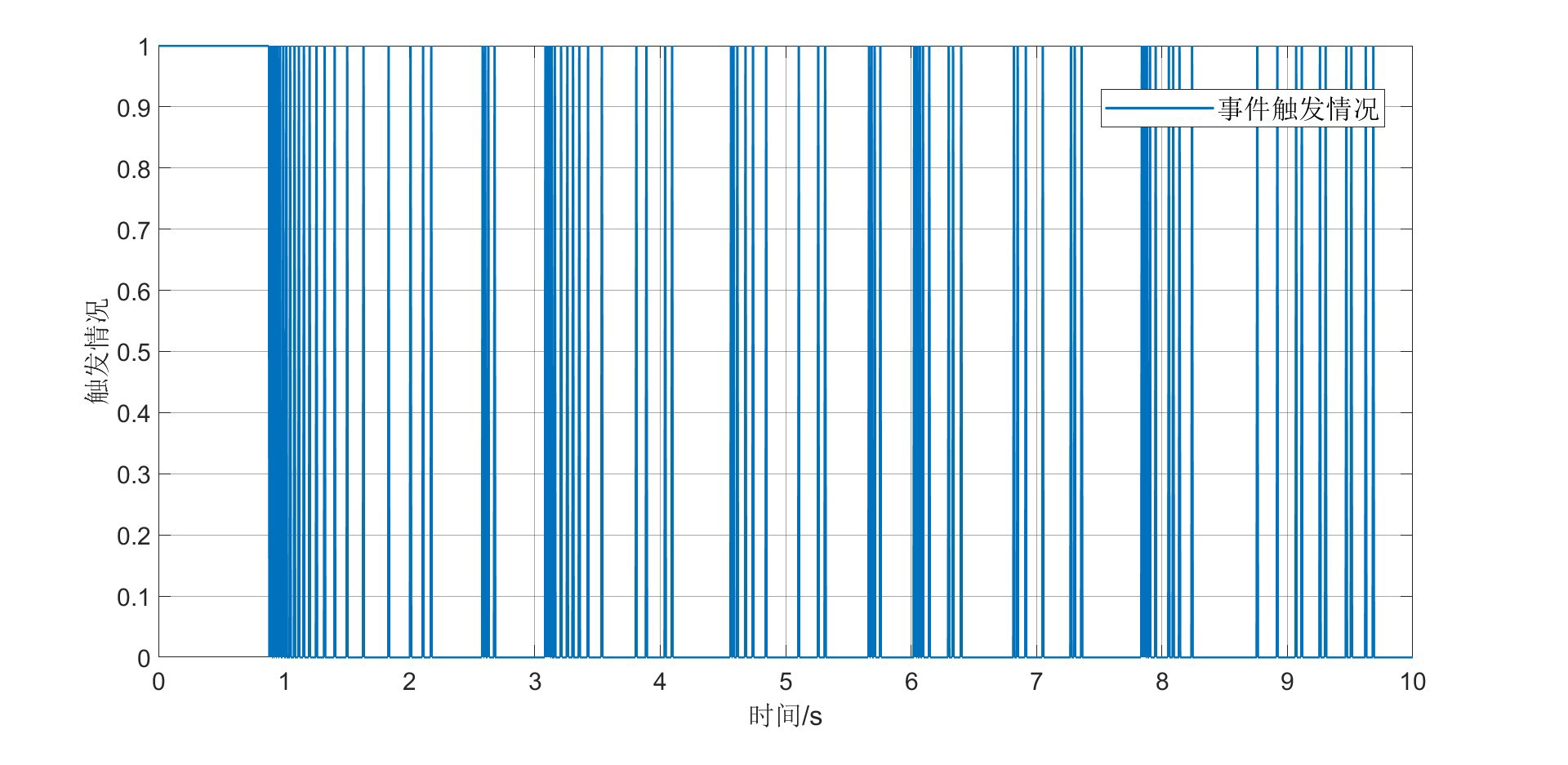
事件触发机制的核心思想是:只有在特定事件发生时才进行采样和控制。例如,当系统的状态变化超过一定阈值时,触发器就会启动,进行一次采样和控制。这种机制可以有效减少控制信号的更新频率,降低系统能耗,同时保持系统的稳定性。
在MATLAB中,我们可以用如下的代码实现一个简单的事件触发机制:
`matlab
% 初始化触发条件
trigger = false;
% 事件触发函数
【模型+参考文献】事件触发模型 基于倒立摆matlab仿真 模型为状态空间形式 事件触发机制可自行调节参数
function trigger = eventTrigger(state, threshold)
% 计算状态变化量
statediff = abs(state - previousstate);
if state_diff > threshold
trigger = true;
else
trigger = false;
end
end
`
这个代码片段展示了事件触发机制的基本逻辑。通过设定一个阈值,我们可以动态调整系统的采样频率。当系统的状态变化超过这个阈值时,触发器就会启动,进行一次采样和控制。
三、MATLAB仿真:让倒立摆起舞
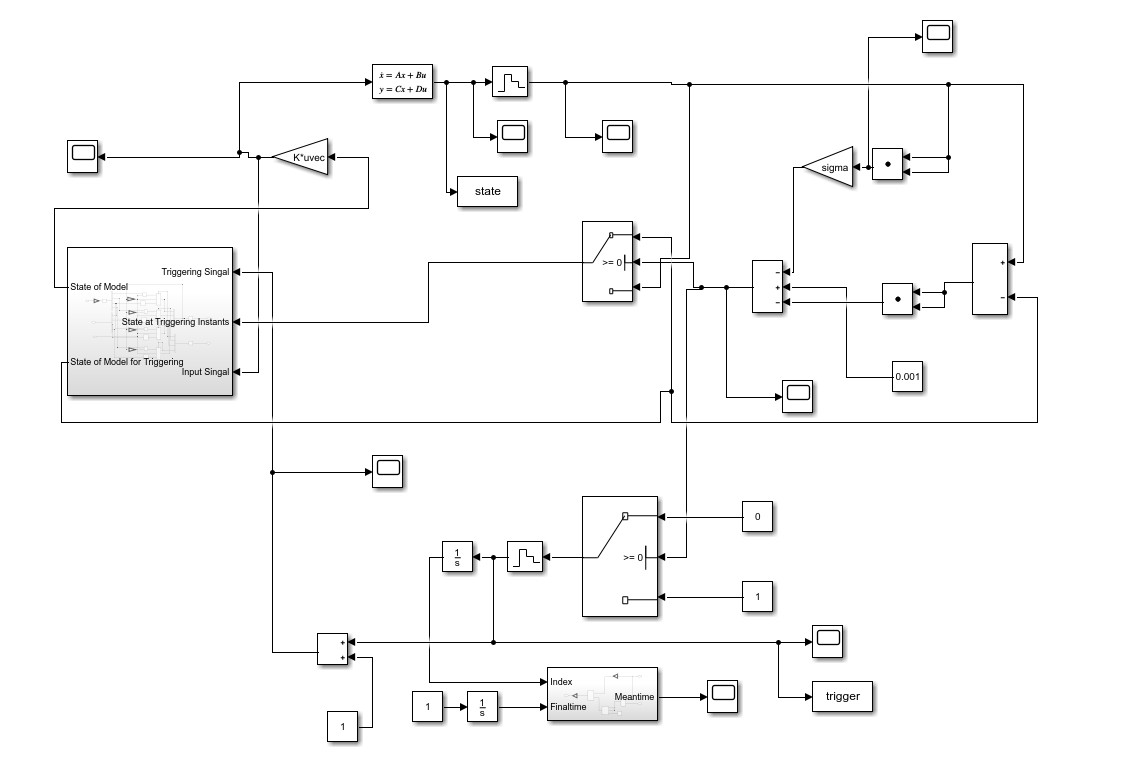
在MATLAB中,我们可以使用Simulink来搭建倒立摆的仿真模型。Simulink提供了丰富的模块库,可以帮助我们快速搭建系统的仿真模型。
首先,我们需要搭建倒立摆的机械模型。在Simulink中,可以使用Simscape Multibody模块来搭建倒立摆的机械结构。然后,我们需要添加控制模块,实现状态空间模型和事件触发机制的控制逻辑。
通过仿真,我们可以观察倒立摆在不同控制策略下的表现。例如,可以比较固定频率控制和事件触发控制下的系统响应。通过调整事件触发机制的参数,我们可以找到一个平衡点,既保证系统的稳定性,又降低系统的能耗。
四、代码分析:让倒立摆更聪明
在代码实现中,事件触发机制的参数设置非常关键。这些参数决定了触发器的灵敏度和系统的响应速度。例如,触发阈值的设置直接影响到系统的采样频率和控制精度。
通过调整这些参数,我们可以实现对倒立摆系统的精细控制。例如,可以设置不同的阈值来应对不同的系统状态。当系统处于稳定状态时,可以采用较低的阈值,减少控制信号的更新频率;当系统处于动态变化时,可以采用较高的阈值,提高控制的响应速度。
在代码实现中,我们还需要考虑系统的实时性和鲁棒性。例如,需要确保触发器的逻辑不会导致系统的抖动或振荡。同时,还需要考虑系统的抗干扰能力,确保在外界干扰下,系统仍然能够保持稳定。
五、结语:控制理论的诗意表达
倒立摆的控制问题是一个典型的控制理论问题,它不仅具有重要的理论意义,还有广泛的实际应用。通过事件触发机制,我们可以实现对倒立摆系统的智能控制,让这个不稳定的系统在代码的世界里实现优雅的舞步。
在MATLAB的仿真环境中,我们可以直观地观察倒立摆在不同控制策略下的表现。通过调整事件触发机制的参数,我们可以找到一个平衡点,既保证系统的稳定性,又降低系统的能耗。这种探索的过程就像在解一道数学题,每一步都需要精确的计算和严谨的逻辑,但最终的结果却充满了美感和诗意。
代码的世界充满了无限的可能,每一个参数的调整都可能带来意想不到的效果。让我们一起,在代码的世界里,探索更多控制理论的奥秘,让更多的系统在我们的控制下实现优雅的舞步。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 3
3 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)