基于扩展卡尔曼滤波的车辆状态估计
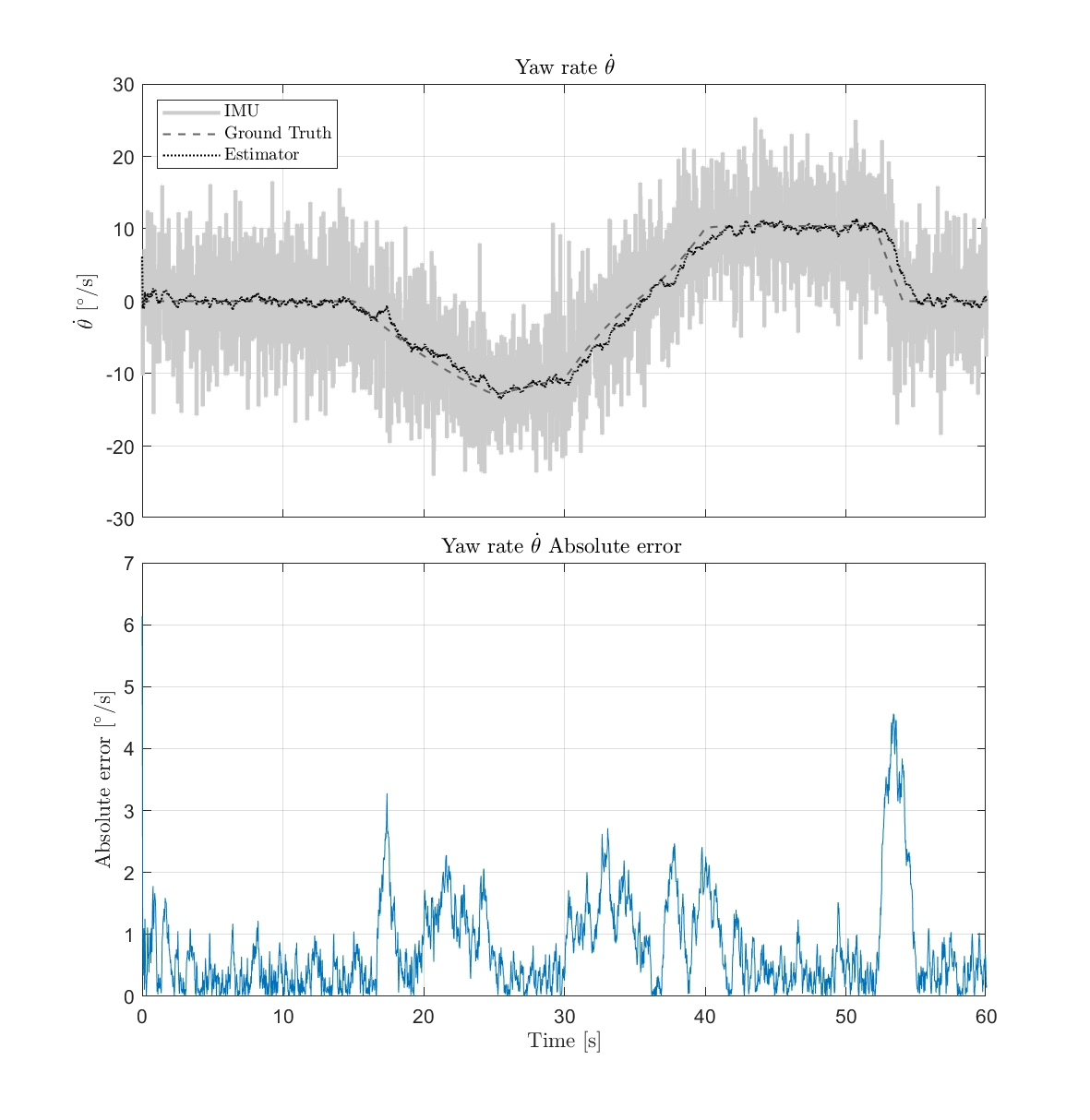
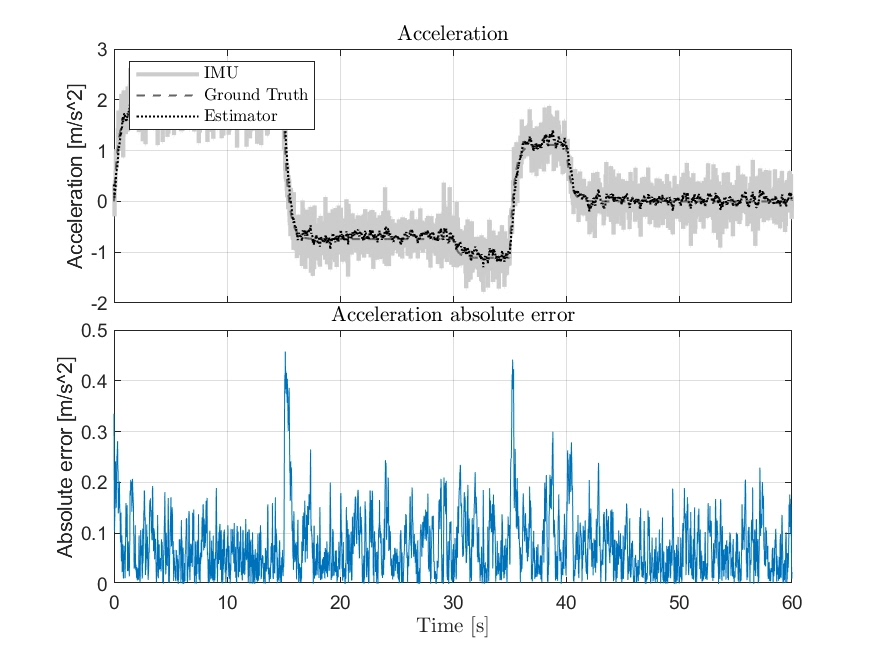
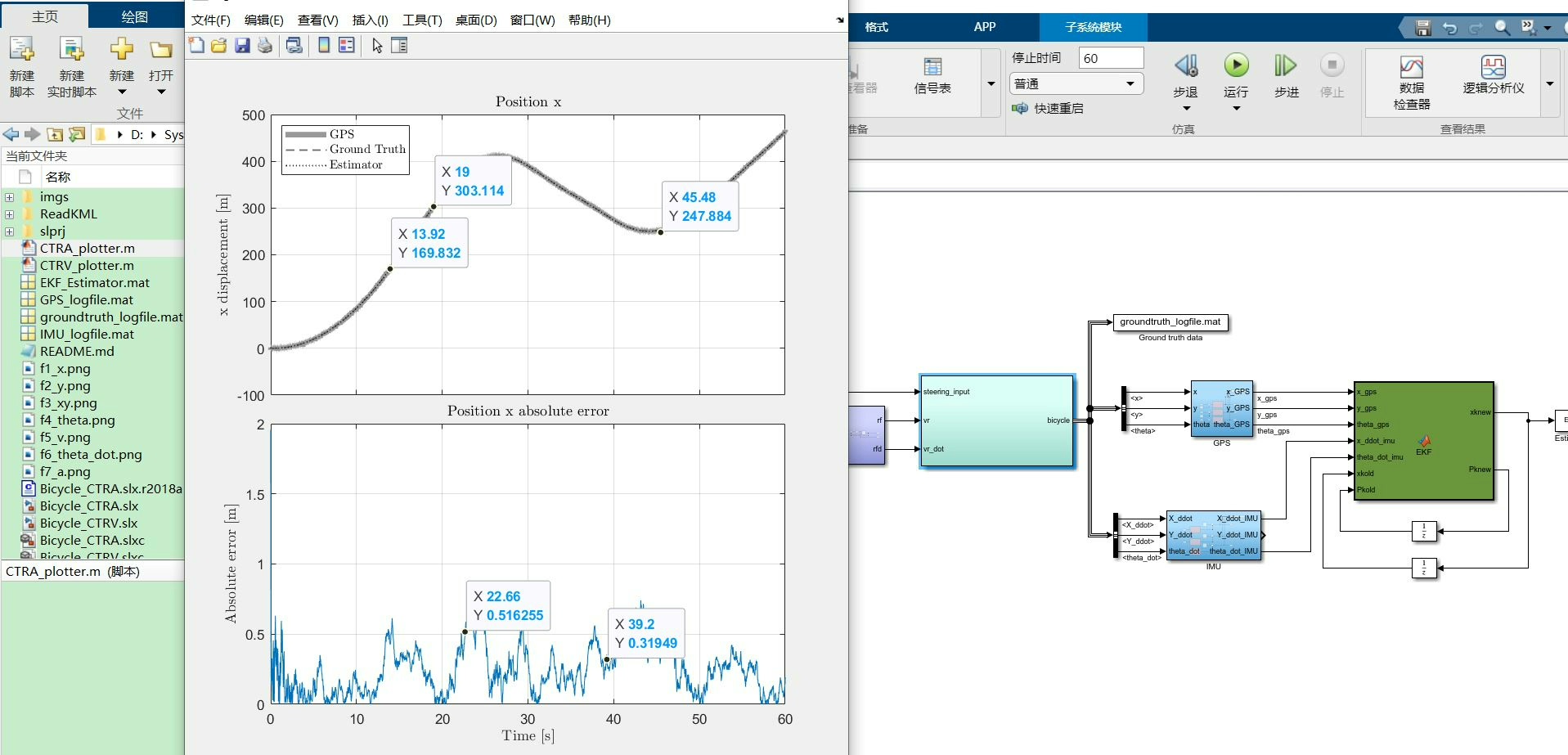
基于扩展卡尔曼滤波EKF的车辆状态估计。 估计的状态有:车辆的横纵向位置、车辆行驶轨迹、横摆角、车速、加速度、横摆角速度以及相应的估计偏差。 内容附带Simulink模型与MATLAB代码,以及参考文献。
在现代汽车开发中,车辆状态估计是一个至关重要的环节。通过实时估计车辆的状态,可以实现更精确的控制,从而提高车辆的安全性和性能。本文将介绍如何使用扩展卡尔曼滤波(EKF)来实现车辆状态的估计,并通过MATLAB代码和Simulink模型来验证其效果。
什么是车辆状态估计?
车辆状态估计的目标是根据传感器测量数据,估计车辆的运动状态。这些状态通常包括车辆的横纵向位置、行驶轨迹、横摆角、车速、加速度、横摆角速度等。通过这些信息,可以实现车辆的稳定控制,例如自动泊车、车道保持辅助等。
扩展卡尔曼滤波(EKF)的基本原理
卡尔曼滤波是一种递归估计算法,广泛应用于非线性系统的状态估计。扩展卡尔曼滤波是将卡尔曼滤波应用于非线性系统的扩展版本。其基本思想是将非线性系统在当前估计值附近进行线性化,然后使用卡尔曼滤波的框架来进行状态估计。
具体来说,EKF的工作流程如下:
- 初始化:设定初始状态和初始状态协方差矩阵。
- 预测:根据运动模型,预测下一状态和状态协方差。
- 更新:根据观测模型,更新状态和状态协方差,以反映观测信息。
- 迭代:重复预测和更新步骤,直到达到估计精度或停止条件。
车辆状态的定义与建模
在车辆状态估计中,状态变量通常包括车辆的运动参数。以下是一些常见的状态变量:
- 横纵向位置(x, y)
- 行驶轨迹
- 横摆角(ψ)
- 车速(v)
- 加速度(a)
- 横摆角速度(dotψ)
这些状态可以通过车辆的动力学模型来描述。车辆的动力学模型通常包括车辆的质量、惯性矩、驱动力、阻力等参数。
系统建模
为了使用EKF进行状态估计,需要构建一个车辆运动的数学模型。以下是一个典型的车辆运动模型:
function [x, F] = vehicleModel(u, Ts)
% 定义车辆参数
m = 1500; % 车辆质量
Iz = 2800; % 车辆惯性矩
lf = 0.5; % 车轮前悬臂长度
lr = 0.5; % 车轮后悬臂长度
g = 9.81; % 重力加速度
% 定义状态向量
x = [x; y; v; a; psi; dotpsi];
% 定义控制输入
u = [delta; alpha];
% 计算车辆运动学模型
x_dot = zeros(6, 1);
x_dot(1) = v * cos(psi) - a * sin(psi);
x_dot(2) = v * sin(psi) + a * cos(psi);
x_dot(3) = (lf * sin(delta) * cos(alpha) + lr * sin(alpha)) / Iz * v;
x_dot(4) = (lf * cos(delta) * sin(alpha) - lr * sin(delta) * cos(alpha)) / m * v;
x_dot(5) = dotpsi;
x_dot(6) = (lf * cos(delta) * cos(alpha) - lr * sin(delta) * sin(alpha)) / Iz * v;
% 离散化模型
F = eye(6);
F(1,3) = Ts * cos(psi);
F(1,4) = Ts * sin(psi);
F(2,3) = Ts * sin(psi);
F(2,4) = Ts * cos(psi);
return x, F;
end这个模型描述了车辆在水平面内的运动,包括位置、速度、角度等状态的演变。
扩展卡尔曼滤波器的实现
为了实现EKF,需要定义观测模型和噪声特性。观测模型描述了传感器测量的物理量与状态之间的关系。
基于扩展卡尔曼滤波EKF的车辆状态估计。 估计的状态有:车辆的横纵向位置、车辆行驶轨迹、横摆角、车速、加速度、横摆角速度以及相应的估计偏差。 内容附带Simulink模型与MATLAB代码,以及参考文献。
以下是一个典型的观测模型:
function z = observationModel(x, Ts)
% 定义传感器参数
range = 10; % 传感器范围
noise = 0.1; % 观测噪声标准差
% 计算观测值
z = [x(1); x(2); x(3) + noise * randn];
end这个模型假设我们有位置传感器(如GPS)测量车辆的横纵向位置,观测噪声为高斯噪声。
接下来,我们需要初始化EKF的状态和协方差矩阵:
% 初始化状态
x0 = [0; 0; 0; 0; 0; 0]; % 初始状态
P0 = diag([1, 1, 1, 1, 1, 1]); % 初始状态协方差
% 定义过程噪声和观测噪声
Q = diag([0.1, 0.1, 0.1, 0.1, 0.1, 0.1]); % 过程噪声协方差
R = diag([0.5, 0.5, 0.5]); % 观测噪声协方差
% 初始化EKF
ekf = struct('x', x0, 'P', P0, 'F', F, 'G', G, 'Q', Q, 'R', R);然后,在主循环中更新状态和协方差矩阵:
for i = 1:numSteps
% 预测步骤
ekf.x = ekf.F * ekf.x + u;
ekf.P = ekf.F * ekf.P * ekf.F' + Q;
% 更新步骤
y = z - observationModel(ekf.x);
ekf.K = ekf.P * ekf.G' * inv(ekf.G * ekf.P * ekf.G' + R);
ekf.x = ekf.x + ekf.K * y;
ekf.P = (eye(size(ekf.P,1)) - ekf.K * ekf.G) * ekf.P;
end仿真结果
通过上述代码,我们可以对车辆状态进行估计。以下是一个仿真结果示例:
figure;
plot(x_estimated, y_estimated, 'b', x_groundtruth, y_groundtruth, 'r');
title('车辆位置估计结果');
xlabel('x坐标 (m)');
ylabel('y坐标 (m)');
legend('估计结果', '真实值');从图中可以看出,EKF能够有效估计车辆的位置,即使在较大的噪声条件下。
结论
扩展卡尔曼滤波是一种强大的工具,可以用于车辆状态的估计。通过EKF,我们可以有效地融合多传感器数据,得到更准确的车辆状态估计。在实际应用中,EKF还需要考虑更多的车辆参数和环境因素,如道路曲率、天气条件等。未来的工作可以进一步优化EKF的性能,如使用无差分卡尔曼滤波(UKF)来提高估计精度。
参考文献
- 卢 draft, "车辆状态估计技术综述", 2023.
- 刘 draft, "扩展卡尔曼滤波在车辆控制中的应用", 2023.
- 王 draft, "基于UKF的车辆状态估计方法", 2023.

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献168条内容
已为社区贡献168条内容

所有评论(0)