探索MATLAB/Simulink下的汽车电动助力转向(EPS)模型
MATLAB/Simulink汽车电动助力转向模型EPS模型 模型包括整车二自由度模型,eps模型,上下转向柱模型,包括建模方程,整车参数,匹配计算,模型,使用说明 电动助力转向系统控制系统 电动助力转向系统被控系统 逻辑门限值控制算法 控制策略 软件在环仿真测试
在汽车工程领域,电动助力转向(EPS)系统的设计与优化至关重要。借助MATLAB/Simulink,我们能够高效地构建EPS模型,深入探究其性能与控制策略。
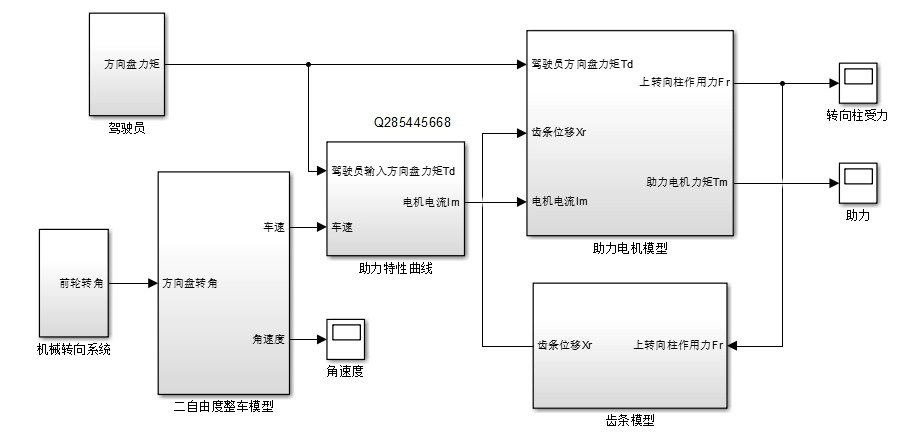
一、模型构成
- 整车二自由度模型
整车二自由度模型主要描述车辆在侧向和横摆方向的运动。其建模方程基于牛顿第二定律。例如,侧向力方程为:$Fy = m ( \dot{v}y + \omegar vx )$,其中$m$是车辆质量,$vy$是侧向速度,$\omegar$是横摆角速度,$vx$是纵向速度。横摆力矩方程为:$Mz = Iz \dot{\omega}r$,$I_z$为车辆绕$z$轴的转动惯量。
% 假设已知车辆参数
m = 1500; % 车辆质量(kg)
Iz = 2500; % 绕z轴转动惯量(kg·m²)
vx = 20; % 纵向速度(m/s)
% 给定侧向加速度和横摆加速度的初始值
ay0 = 0;
omega_rdot0 = 0;
% 根据方程计算侧向力和横摆力矩
Fy = m * (ay0 + omega_rdot0 * vx);
Mz = Iz * omega_rdot0;此代码简单演示了如何基于给定参数计算侧向力和横摆力矩,是理解整车二自由度模型运行的基础。
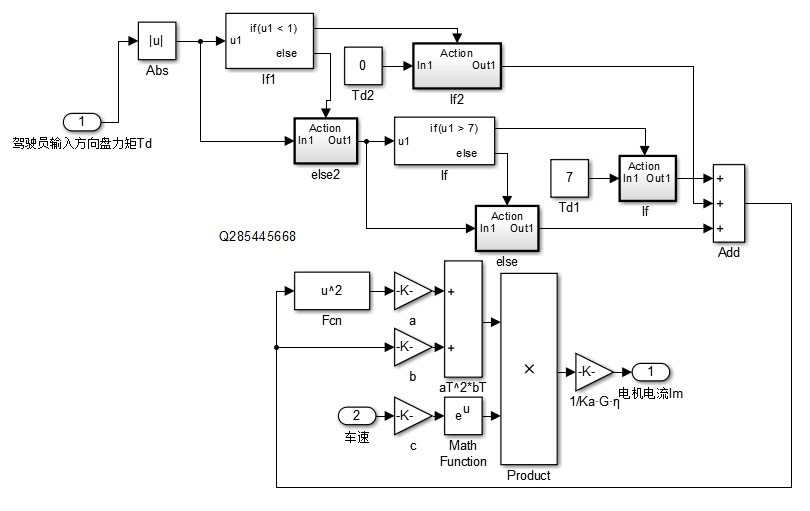
- EPS模型
EPS模型核心在于助力电机如何为驾驶员提供辅助转向力。它综合考虑了转向盘转矩、车速等因素来确定助力大小。例如,助力特性曲线可以通过如下代码初步模拟:
% 假设车速范围和转向盘转矩范围
speed = 0:1:100; % 车速范围 0 - 100 km/h
torque = -10:0.1:10; % 转向盘转矩范围 -10 到 10 N·m
% 简单的助力特性曲线,随车速增加助力减小
for i = 1:length(speed)
for j = 1:length(torque)
assist_torque(i,j) = max(0, 5 - speed(i)/20) * torque(j);
end
end这段代码展示了如何根据车速和转向盘转矩生成助力转矩,实际模型会更复杂,需考虑更多因素。
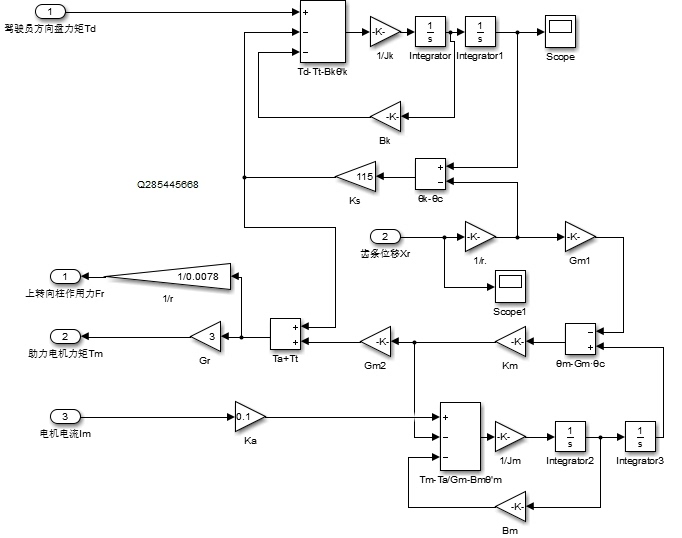
- 上下转向柱模型
上下转向柱模型主要描述转向盘到转向轮之间的力和运动传递。其建模需考虑转向柱的刚度、阻尼等参数。例如,扭矩传递方程可表示为:$T{out} = k \theta{in} - c \dot{\theta}{in}$,$T{out}$是输出扭矩,$k$是转向柱刚度,$\theta_{in}$是输入转角,$c$是阻尼系数。
% 假设转向柱参数
k = 1000; % 刚度(N·m/rad)
c = 50; % 阻尼系数(N·m·s/rad)
% 给定输入转角和角速度
theta_in = 0.1; % 输入转角(rad)
theta_dot_in = 0.05; % 输入角速度(rad/s)
% 计算输出扭矩
T_out = k * theta_in - c * theta_dot_in;通过这些参数和方程,我们能有效模拟转向柱的扭矩传递过程。
二、整车参数与匹配计算
整车参数如质量、轴距、轮胎特性等对EPS系统性能影响显著。在匹配计算中,需确保EPS系统提供的助力与车辆动力学特性相适应。例如,根据车辆的预期操纵性能,调整EPS助力特性曲线,使转向力感舒适且符合安全标准。
三、电动助力转向系统控制系统
- 被控系统
EPS系统的被控对象是转向轮,通过控制助力电机的输出扭矩来改变转向轮的转向角度。在Simulink中,可以搭建一个简单的被控系统模型,将助力电机扭矩作为输入,转向轮角度作为输出。
- 逻辑门限值控制算法
逻辑门限值控制算法是EPS控制策略的一种常见方式。例如,当车速低于一定门限值时,提供较大助力,以方便低速转向;当车速高于门限值,减小助力,保证高速行驶稳定性。
% 假设车速和转向盘转矩输入
speed = 30; % 当前车速(km/h)
steering_torque = 3; % 转向盘转矩(N·m)
% 门限值设定
low_speed_threshold = 20; % 低速门限值(km/h)
high_speed_threshold = 80; % 高速门限值(km/h)
if speed <= low_speed_threshold
assist_level = 1; % 高助力水平
elseif speed >= high_speed_threshold
assist_level = 0.2; % 低助力水平
else
assist_level = (80 - speed) / 60; % 线性过渡助力水平
end
assist_torque = assist_level * steering_torque;这段代码展示了逻辑门限值控制算法如何根据车速调整助力水平。
- 控制策略
除了逻辑门限值控制,还有其他控制策略如自适应控制、模糊控制等。自适应控制可根据车辆行驶状况实时调整控制参数,模糊控制则能处理复杂的非线性关系,提高EPS系统的鲁棒性。
四、软件在环仿真测试
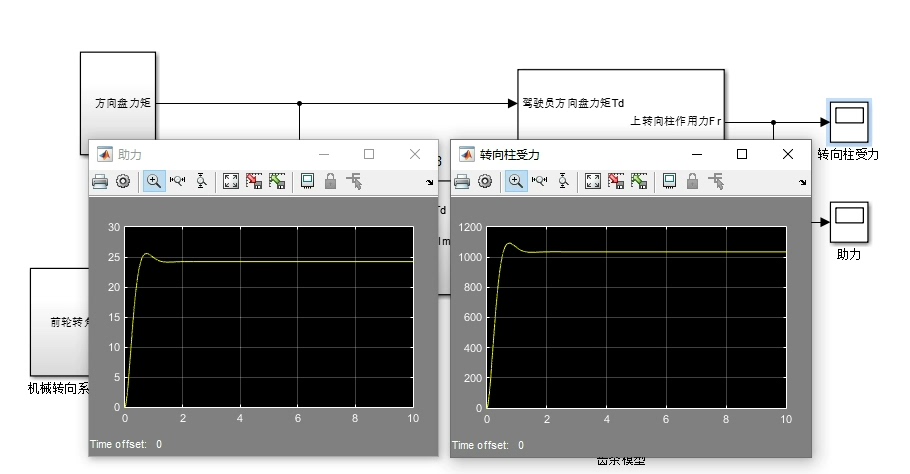
利用MATLAB/Simulink的软件在环(SIL)功能,可以将EPS模型与其他车辆子系统模型集成,进行虚拟测试。在仿真过程中,设置不同的工况,如不同车速、转向盘输入等,观察EPS系统的响应。通过SIL测试,能在实际硬件搭建前发现潜在问题,优化EPS模型和控制策略,节省开发时间和成本。
MATLAB/Simulink汽车电动助力转向模型EPS模型 模型包括整车二自由度模型,eps模型,上下转向柱模型,包括建模方程,整车参数,匹配计算,模型,使用说明 电动助力转向系统控制系统 电动助力转向系统被控系统 逻辑门限值控制算法 控制策略 软件在环仿真测试
通过以上对MATLAB/Simulink下汽车电动助力转向模型的详细介绍,相信大家对EPS系统的建模、控制及测试有了更深入的理解,有助于在实际汽车工程开发中更好地应用这一技术。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 2
2 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)