汽车稳定性滑模控制系统Matlab仿真:全方位解析
汽车稳定性滑模控制系统matlab仿真 1、含不用控制器效果对比 2、含不用控制器参数效果对比 3、含无控制器时整车动力学模型m文件 4、含参考资料
在汽车工程领域,汽车稳定性控制系统对于保障行车安全至关重要。滑模控制作为一种非线性控制策略,在汽车稳定性控制中展现出独特优势。今天咱们就来深入探讨汽车稳定性滑模控制系统的Matlab仿真,看看不同控制器及其参数,还有无控制器时整车动力学模型的表现。
一、不用控制器效果对比
在进行汽车稳定性滑模控制仿真时,首先得看看不用控制器时车辆的运行状况。这就好比先了解一个人的“自然状态”,才能更好地判断施加干预(控制器)后的变化。
为了实现这一对比,我们需要建立一个基础的车辆动力学模型。假设我们已经构建好了这个模型,在Matlab中,我们可以通过一系列函数和脚本来模拟车辆的运动。
% 简单示例,假设车辆模型函数为vehicleModel
function [state] = vehicleModel(inputs)
% inputs 可能包含速度、转向角等输入参数
% 这里简单假设只考虑速度对车辆位置的影响
velocity = inputs(1);
dt = 0.01; % 时间步长
% 假设车辆初始位置为0
static state = 0;
state = state + velocity * dt;
end在上述简单代码中,vehicleModel函数接收输入参数(这里简化为只考虑速度),基于设定的时间步长,计算车辆的位置状态。这只是一个极度简化的示例,实际的车辆动力学模型要复杂得多,会涉及到更多的物理量和耦合关系。
汽车稳定性滑模控制系统matlab仿真 1、含不用控制器效果对比 2、含不用控制器参数效果对比 3、含无控制器时整车动力学模型m文件 4、含参考资料
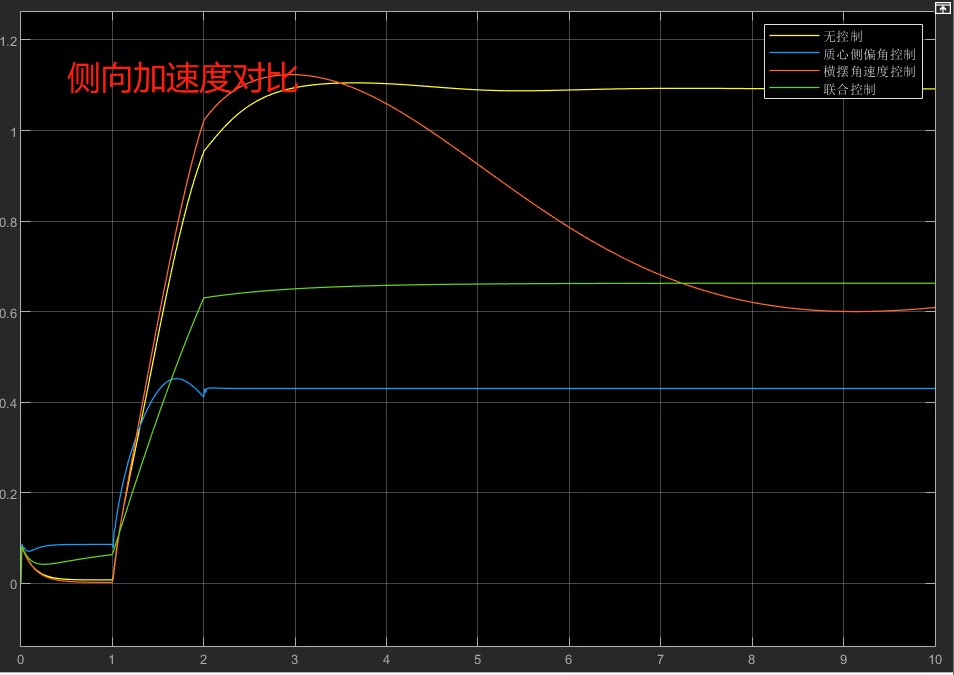
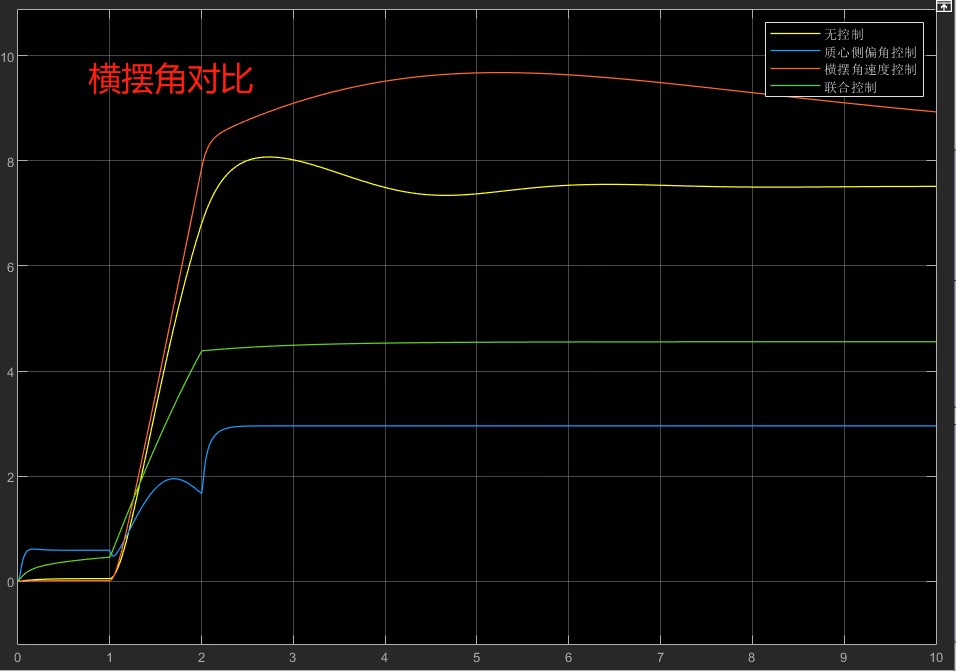
当没有控制器介入时,车辆的运动可能会受到各种外界因素干扰,导致行驶轨迹不稳定。比如,在弯道行驶时,车辆可能因离心力过大而偏离预定路线。我们可以通过在不同的行驶工况下运行这个基础模型,记录车辆的关键状态参数,如横摆角速度、侧向加速度等,来直观地看到无控制器时车辆稳定性的缺失。
二、不用控制器参数效果对比
控制器的参数设置对于其性能表现有着决定性作用。以滑模控制器为例,像滑模面参数、控制增益等参数的不同取值,会让控制器的效果大相径庭。
假设我们在Matlab中构建了一个滑模控制器函数slidingModeController。
function [controlInput] = slidingModeController(state, desiredState, params)
% state 当前车辆状态
% desiredState 期望车辆状态
% params 包含控制器参数,如滑模面参数sigma, 控制增益k
sigma = params(1);
k = params(2);
error = desiredState - state;
s = error(1) + sigma * error(2); % 滑模面函数简单示例
if s > 0
controlInput = -k;
else
controlInput = k;
end
end在这个简单的滑模控制器代码中,通过计算当前状态与期望状态的误差,构建滑模面函数。根据滑模面的取值,决定输出的控制输入。当我们改变sigma和k的值时,也就是改变了控制器参数。较小的sigma值可能使系统响应速度变慢,但会更平稳;而较大的k值可能增强系统的抗干扰能力,但同时也可能引入更多的高频抖振。
我们可以通过在不同参数组合下运行仿真,记录车辆的控制效果指标,如跟踪误差、超调量等,来对比不同控制器参数对汽车稳定性控制的影响。
三、无控制器时整车动力学模型m文件
下面是一个相对更完整的无控制器时整车动力学模型的m文件示例(仅为示例,实际模型会更复杂):
% 无控制器整车动力学模型
function [x_dot] = vehicleDynamics(t, x, u)
% t 当前时间
% x 状态变量 [纵向速度vx; 侧向速度vy; 横摆角速度r]
% u 输入变量 [驱动力F; 转向角delta]
% 车辆参数
m = 1500; % 车辆质量 (kg)
Iz = 2500; % 车辆绕z轴转动惯量 (kg*m^2)
lf = 1.2; % 前轴到质心距离 (m)
lr = 1.5; % 后轴到质心距离 (m)
Cf = 60000; % 前轮侧偏刚度 (N/rad)
Cr = 70000; % 后轮侧偏刚度 (N/rad)
vx = x(1);
vy = x(2);
r = x(3);
F = u(1);
delta = u(2);
% 纵向动力学方程
vx_dot = F / m - vy * r;
% 侧向动力学方程
alpha_f = atan((vy + lf * r) / vx) - delta;
alpha_r = atan((vy - lr * r) / vx);
Fyf = Cf * alpha_f;
Fyr = Cr * alpha_r;
vy_dot = (Fyf + Fyr) / m - vx * r;
% 横摆动力学方程
r_dot = (lf * Fyf - lr * Fyr) / Iz;
x_dot = [vx_dot; vy_dot; r_dot];
end在这个模型中,我们考虑了车辆的纵向、侧向和横摆动力学。通过输入当前时间、车辆状态变量和控制输入(这里虽然是无控制器情况,但保留输入变量以便后续扩展),计算出车辆状态变量的导数。这些导数将用于数值积分,以模拟车辆随时间的运动。
四、含参考资料
- 《汽车动力学及其控制》 - 喻凡、林逸著。这本书详细介绍了汽车动力学的基本原理,为构建准确的整车动力学模型提供了理论基础。
- 《滑模变结构控制理论与应用》 - 高为炳著。对于深入理解滑模控制的原理、设计方法以及在实际系统中的应用有着极大的帮助。
- Matlab官方文档。在进行Matlab仿真过程中,官方文档是必不可少的参考资料,它能帮助我们正确使用各种函数和工具,优化仿真代码。
通过以上对汽车稳定性滑模控制系统Matlab仿真中不同方面的探讨,我们对车辆在不同控制策略下的表现有了更清晰的认识,这对于进一步优化汽车稳定性控制系统有着重要意义。无论是对比不同控制器效果、研究控制器参数影响,还是深入理解无控制器时的整车动力学模型,都是汽车工程领域不断追求安全与性能提升的关键步骤。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)