探索四轮独立驱动/转向车辆的控制奥秘:MPC引领之路
四轮独立驱动/转向路径跟踪及车辆稳定性控制 模型预测控制MPC 上层4WS+DYC,下层阿克曼转向分配和最小轮胎负荷率驱动力矩分配
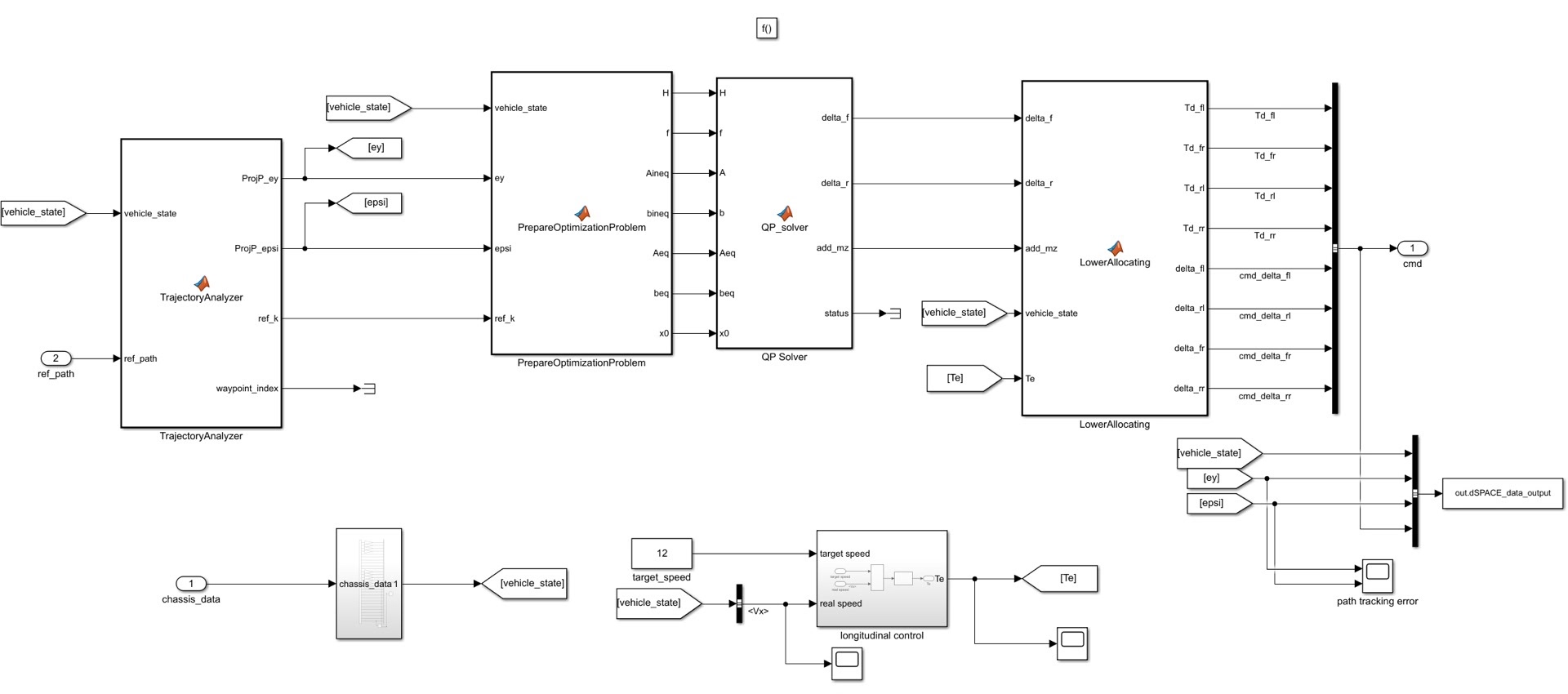
在智能车辆的发展进程中,四轮独立驱动/转向技术犹如一颗璀璨的明珠,为实现更精准的路径跟踪和卓越的车辆稳定性控制带来了无限可能。而在这背后,模型预测控制(MPC)则扮演着核心大脑的关键角色,协同上层的 4WS(四轮转向) + DYC(直接横摆力矩控制)以及下层的阿克曼转向分配和最小轮胎负荷率驱动力矩分配,构建起一个复杂而精妙的控制系统。
MPC:掌控全局的智慧核心
MPC 作为一种先进的控制策略,在四轮独立驱动/转向车辆系统中起到了承上启下的关键作用。它基于车辆的动力学模型,对未来一段时间内的车辆状态进行预测,并通过优化算法求解出最优的控制输入序列,从而实现对车辆运动的精准调控。
# 简单示例代码,展示MPC预测部分
import numpy as np
# 假设的车辆动力学模型参数
A = np.array([[1, 0.1, 0],
[0, 1, 0.1],
[0, 0, 1]])
B = np.array([[0.05],
[0],
[0.05]])
# 当前车辆状态
x_current = np.array([[0],
[0],
[0]])
# 预测步数
N = 10
# 预测未来状态
for k in range(N):
u = np.array([[0.1]]) # 假设的控制输入
x_next = A.dot(x_current) + B.dot(u)
print(f"预测第 {k+1} 步状态: {x_next.flatten()}")
x_current = x_next在这段简单的代码中,我们通过定义车辆动力学模型的状态转移矩阵 A 和控制输入矩阵 B,基于当前车辆状态 x_current,对未来 N 步的状态进行预测。每一步都根据动力学模型和假设的控制输入 u 计算下一步的状态。这就类似于 MPC 在实际车辆控制中的预测过程,只不过实际应用中的模型会更加复杂,考虑的因素也更多。
上层:4WS + DYC 的协同舞蹈
上层控制由 4WS 和 DYC 共同构成,它们像是车辆的两位得力舞者,紧密协作,引领车辆优雅地行驶在预定路径上,并保持良好的稳定性。
4WS 通过精确控制四个车轮的转向角度,不仅提升了车辆的转向灵活性,还能在高速行驶或紧急转向时显著改善车辆的操纵稳定性。例如,在高速变道过程中,后轮可以与前轮协同转向,减小车辆的横摆角速度,让车辆更加平稳地完成变道动作。
四轮独立驱动/转向路径跟踪及车辆稳定性控制 模型预测控制MPC 上层4WS+DYC,下层阿克曼转向分配和最小轮胎负荷率驱动力矩分配
DYC 则是通过调节车辆两侧车轮的驱动力矩,产生直接横摆力矩,进而控制车辆的横摆运动。当车辆出现转向不足或过度转向趋势时,DYC 能够迅速做出反应,通过调整驱动力矩,纠正车辆的行驶姿态,确保车辆沿着预期路径行驶。
下层:阿克曼转向分配与最小轮胎负荷率驱动力矩分配
下层控制如同车辆的坚实根基,阿克曼转向分配确保车辆在转向时,每个车轮都能按照理想的轨迹运动,减少轮胎的磨损和能量损耗。其核心原理基于阿克曼几何关系,使得内侧车轮的转向角度大于外侧车轮,保证车辆在转向过程中各车轮能够纯滚动,避免滑动摩擦。
# 阿克曼转向简单计算示例
def ackermann_steering_angles(vehicle_width, wheelbase, turning_radius):
inner_angle = np.arctan(wheelbase / (turning_radius - vehicle_width / 2))
outer_angle = np.arctan(wheelbase / (turning_radius + vehicle_width / 2))
return inner_angle, outer_angle
vehicle_width = 1.8
wheelbase = 2.7
turning_radius = 10
inner, outer = ackermann_steering_angles(vehicle_width, wheelbase, turning_radius)
print(f"内侧车轮转向角: {np.degrees(inner):.2f} 度")
print(f"外侧车轮转向角: {np.degrees(outer):.2f} 度")这段代码根据车辆的宽度、轴距和转弯半径,计算出阿克曼转向时内侧和外侧车轮的转向角度。在实际车辆中,这一计算结果会用于精确控制每个车轮的转向执行机构。
最小轮胎负荷率驱动力矩分配则致力于优化车辆的动力输出,根据轮胎的负荷情况合理分配驱动力矩,以提高车辆的牵引性能和能源利用效率。当车辆在不同路况或行驶工况下,各轮胎的负荷会发生变化,通过实时监测轮胎负荷率,并据此调整驱动力矩,能够确保每个轮胎都能在最佳工作状态下发挥作用。

四轮独立驱动/转向车辆的路径跟踪及稳定性控制系统是一个多模块协同工作的复杂体系。MPC 作为核心,协调着上层的 4WS + DYC 和下层的阿克曼转向分配与最小轮胎负荷率驱动力矩分配,使得车辆能够在各种复杂路况和行驶条件下,既精准地跟踪预定路径,又能保持出色的稳定性,为未来智能出行奠定了坚实的技术基础。随着技术的不断发展和创新,相信这一领域还将带给我们更多的惊喜和突破。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 10
10 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)