一个完整的工业视觉 AI 系统到底长什么样? ——C#+YOLOv26 + ONNX + Halcon 的完整系统架构拆解
很多刚接触工业视觉 AI 的工程师都会有一个非常简单的理解:
一个工业视觉系统大概是这样:
相机
↓
YOLO检测
↓
OK / NG
看起来似乎很简单。
但只要真正做过一个上线项目,你就会发现:
真实的工业视觉系统根本不是这样。
真实的系统更像是一个完整的软件系统工程。
它通常包含:
- 图像采集
- 数据缓存
- AI 推理
- ROI 分析
- 传统视觉算法
- PLC 通讯
- UI 显示
- 日志系统
- 数据存储
- 配置管理
很多 AI 项目失败,其实并不是因为 模型不行。
而是因为:
系统架构从一开始就没有设计好。
这篇文章,我就结合 C# + YOLOv26 + ONNX + Halcon 的实际项目经验,拆解一个完整工业视觉 AI 系统到底长什么样。
一、真实的工业视觉 AI 系统结构
一个典型工业视觉系统通常分为 五层架构:
设备层
数据层
AI推理层
算法层
系统层
整体结构如下:
工业视觉 AI 系统
┌─────────────────────────────────────┐
│ 设备层 │
│ 相机 光源 PLC 触发信号 │
└─────────────────────────────────────┘
│
▼
┌─────────────────────────────────────┐
│ 数据层 │
│ 图像采集 RingBuffer 任务队列 │
└─────────────────────────────────────┘
│
▼
┌─────────────────────────────────────┐
│ AI 推理层 │
│ YOLOv26 + ONNXRuntime │
│ 缺陷检测 / 目标定位 │
└─────────────────────────────────────┘
│
▼
┌─────────────────────────────────────┐
│ 算法层 │
│ ROI 提取 + Halcon 测量 │
│ 尺寸检测 / 精确定位 │
└─────────────────────────────────────┘
│
▼
┌─────────────────────────────────────┐
│ 系统层 │
│ UI显示 PLC输出 日志 数据存储 │
└─────────────────────────────────────┘
很多人第一次看到这个结构会发现:
原来工业视觉系统并不是一个“AI项目”,而是一个完整的软件系统。
二、设备层:工业视觉系统的入口
设备层负责和真实硬件交互。
通常包括:
工业相机
光源控制器
PLC
触发信号
典型流程:
PLC 触发
↓
相机采图
↓
图像进入处理流程
在 C# 项目中通常会有一个模块:
CameraService
负责:
相机连接
图像抓取
触发控制
异常恢复
很多系统一开始就出问题,其实是因为:
相机采集和算法处理耦合在一起。
正确做法应该是:
采集与处理解耦。
三、数据层:工业系统最容易被忽略的部分
很多 Demo 项目是这样写的:
GrabImage()
Detect()
Show()
但真实系统必须有一个 缓冲层。
常见做法是:
RingBuffer
BlockingQueue
Channel
结构如下:
相机采集线程
│
▼
图像队列
│
▼
AI推理线程
这样做有三个好处:
1️⃣ 防止采图阻塞
2️⃣ 支持多线程推理
3️⃣ 系统更稳定
很多系统 越跑越慢,就是因为没有这个设计。
四、AI 推理层:YOLO 负责“粗检”
AI 推理层一般负责:
目标检测
缺陷定位
区域识别
例如 YOLO 输出:
Bounding Box
Class
Confidence
在工业视觉中,YOLO 更适合做:
缺陷位置定位
ROI区域提取
目标分类
而不是直接做精密检测。
典型代码结构:
InferenceEngine
├─ ModelLoader
├─ Predictor
└─ ResultParser
推理流程:
Image
↓
Preprocess
↓
ONNX Runtime
↓
Postprocess
五、算法层:Halcon 才是精密检测核心
在很多工业视觉项目中,真正做检测的是:
传统视觉算法。
例如:
Halcon
OpenCV
典型任务:
边缘检测
尺寸测量
位置校正
缺陷分析
一个常见架构是:
YOLO
↓
ROI区域
↓
Halcon 精确测量
这样可以同时利用:
AI 的泛化能力
传统算法的精度
这其实是很多成熟工业系统的标准方案。
六、系统层:决定系统能不能长期运行
系统层通常包括:
UI界面
PLC通讯
日志系统
数据保存
配置管理
例如:
UI系统
负责:
实时显示
结果可视化
参数调整
PLC通讯
负责:
OK / NG 输出
触发控制
设备联动
日志系统
工业系统必须有:
运行日志
异常日志
检测记录
否则现场出了问题几乎无法排查。
数据存储
很多系统还会保存:
NG 图片
检测结果
统计数据
用于质量追溯。
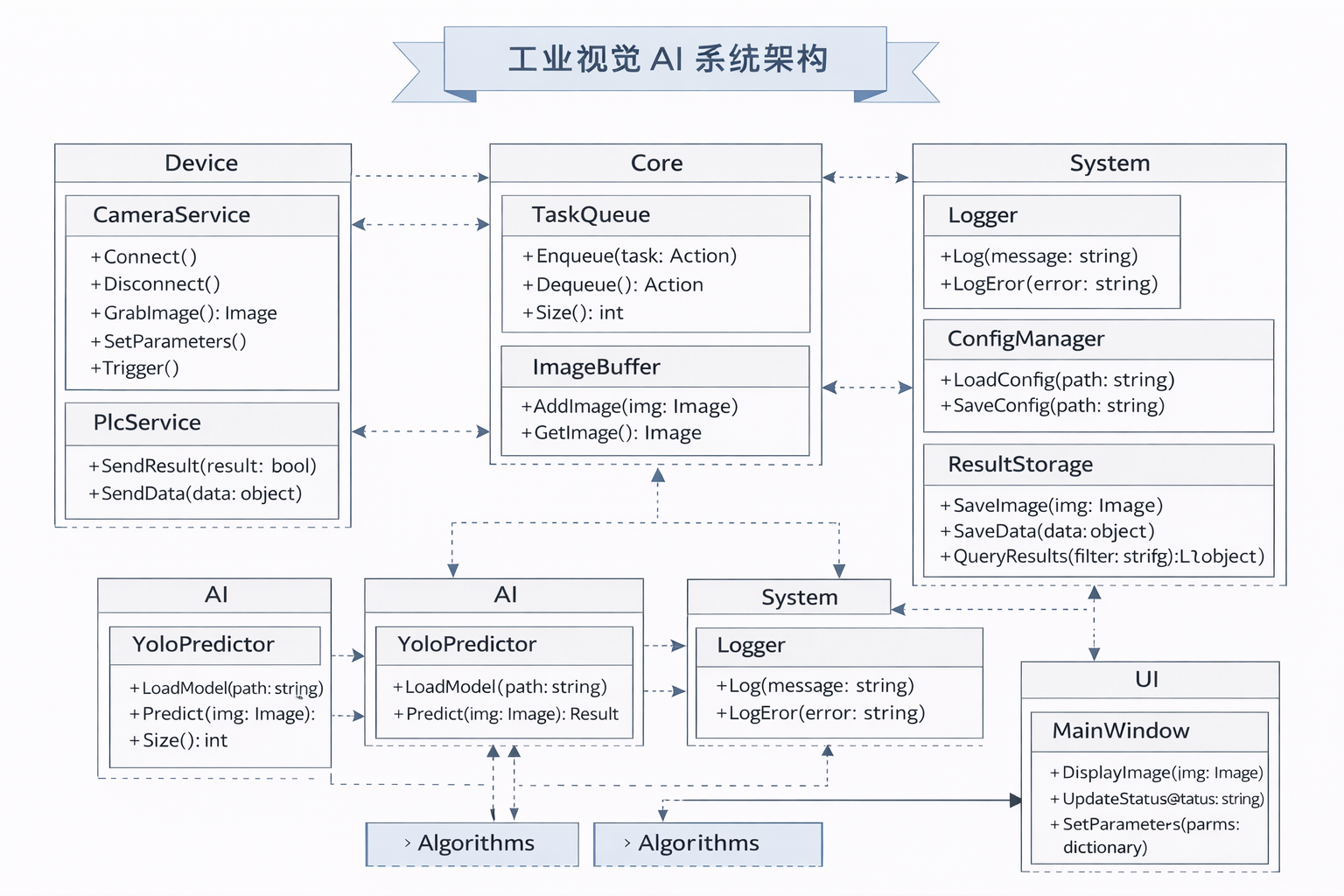
七、一个完整工业视觉项目的代码结构
一个典型 C# 项目结构可能是:
VisionSystem
├─ Device
│ ├─ CameraService
│ └─ PlcService
│
├─ Core
│ ├─ TaskQueue
│ └─ ImageBuffer
│
├─ AI
│ ├─ YoloPredictor
│ └─ OnnxInference
│
├─ Algorithms
│ ├─ ROIExtractor
│ └─ HalconInspector
│
├─ System
│ ├─ Logger
│ ├─ ConfigManager
│ └─ ResultStorage
│
└─ UI
└─ MainWindow
这种结构有几个优点:
模块清晰
职责单一
方便维护
八、工业视觉 AI 项目最大的误区
很多人会把重点放在:
训练更好的模型
优化YOLO
增加数据
但真实情况是:
很多项目的问题根本不在模型。
而在:
系统架构
线程设计
数据流
异常处理
换句话说:
工业视觉 AI 项目,本质不是 AI 项目。
而是一个工业软件系统。
结语
如果你刚开始做工业视觉 AI,最重要的一件事不是:
学更多模型
而是理解:
一个完整系统是怎么设计的
因为只有架构正确:
AI 才能真正落地。
如果这个系列继续写下去,我下一篇准备讲一个很多人都会踩的坑:
《工业视觉 AI 系统为什么一定要做配置化设计?》
很多系统一旦上线就发现:
参数改不了
模型换不了
算法改不了
最后只能重新开发。
如果你做过工业视觉项目,应该会深有体会。
我正在整理一套《工业视觉AI实战工具包》,包括源码、案例、学习路线。
如果你想第一时间获取资料包,请关注公众号–视觉小码农

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)