PMSM自抗扰控制:Matlab Simulink仿真实践
【PMSM自抗扰控制】 PMSM 永磁同步电机 ADRC 自抗扰控制 matlab simulink 仿真 (1)采用转速、电流双闭环控制; (2)外环转速环,采用ADRC控制器控制; (3)内环电流环,采用PI控制; (4)采用SVPWM矢量控制; (5)跟踪性能良好; (6)仿真模型涉及DC直流源、三相逆变桥、PMSM永磁同步电机、ADRC自抗扰控制器、PI比例积分控制器、Park变换、Park反变换、Clark变换、测量模块、显示模块等构成; (7)各个模块功能分类明确,容易理解 送相关参考文献!
在电机控制领域,永磁同步电机(PMSM)因其高效、高功率密度等优点得到广泛应用。今天咱们聊聊PMSM的自抗扰控制(ADRC),并通过Matlab Simulink搭建仿真模型来一探究竟。
控制策略概述
- 转速、电流双闭环控制:这是常见的PMSM控制结构,外环转速环决定电机的速度输出,内环电流环保障电机的转矩输出。双闭环能有效提升系统的动态性能和稳定性。
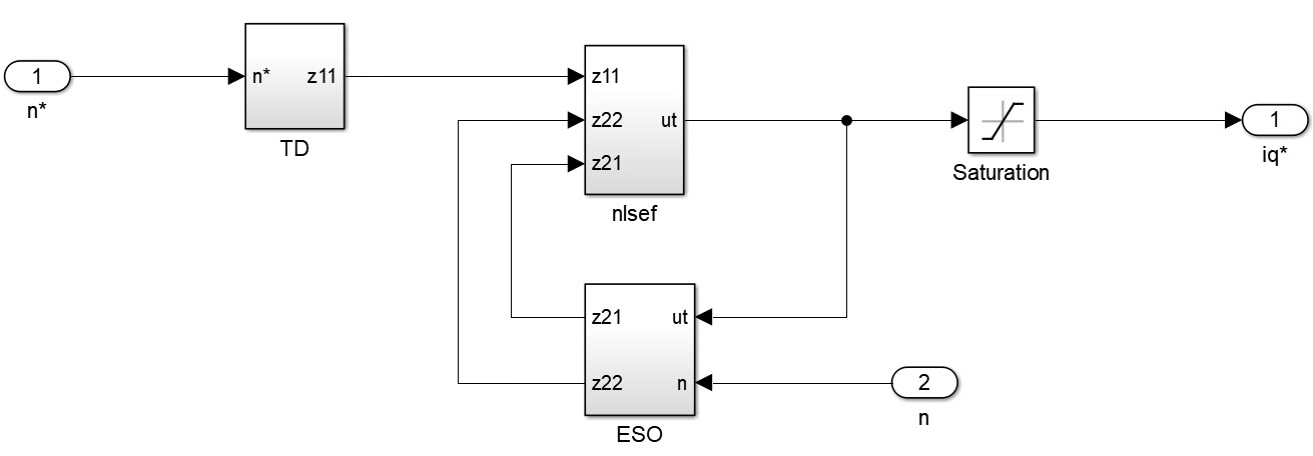
- 外环转速环 - ADRC控制器:自抗扰控制可不一般,它能对系统的内外部扰动进行实时估计并补偿。相比传统PI控制,ADRC对模型不确定性和外部干扰的鲁棒性更强。
% ADRC转速环控制示例代码(部分关键参数设置)
% 这里简单模拟一下ADRC参数初始化
beta01 = 100;
beta02 = 200;
beta1 = 1000;
beta2 = 2000;
beta3 = 5000;
b0 = 1;
% 以上参数在实际应用中需根据系统特性仔细调整上述代码对ADRC的部分关键参数进行了初始化。beta01、beta02用于跟踪微分器,beta1、beta2、beta3用于扩张状态观测器,b0用于补偿器。这些参数的取值对ADRC的性能影响巨大,需要根据电机的实际特性和控制要求精细调整。
- 内环电流环 - PI控制:PI控制器根据电流误差调整输出,快速跟踪电流指令,使电机输出期望转矩。
% PI电流环控制示例代码
kp = 0.5;
ki = 10;
% 这里kp为比例系数,ki为积分系数,具体值需根据电流环特性调整这段代码设置了PI控制器的比例系数kp和积分系数ki。通过调整这两个参数,能优化电流环的响应速度和稳态精度。
- SVPWM矢量控制:利用空间电压矢量调制技术,将逆变器的开关状态进行优化组合,有效提升直流电压利用率,降低电机转矩脉动。
仿真模型构成
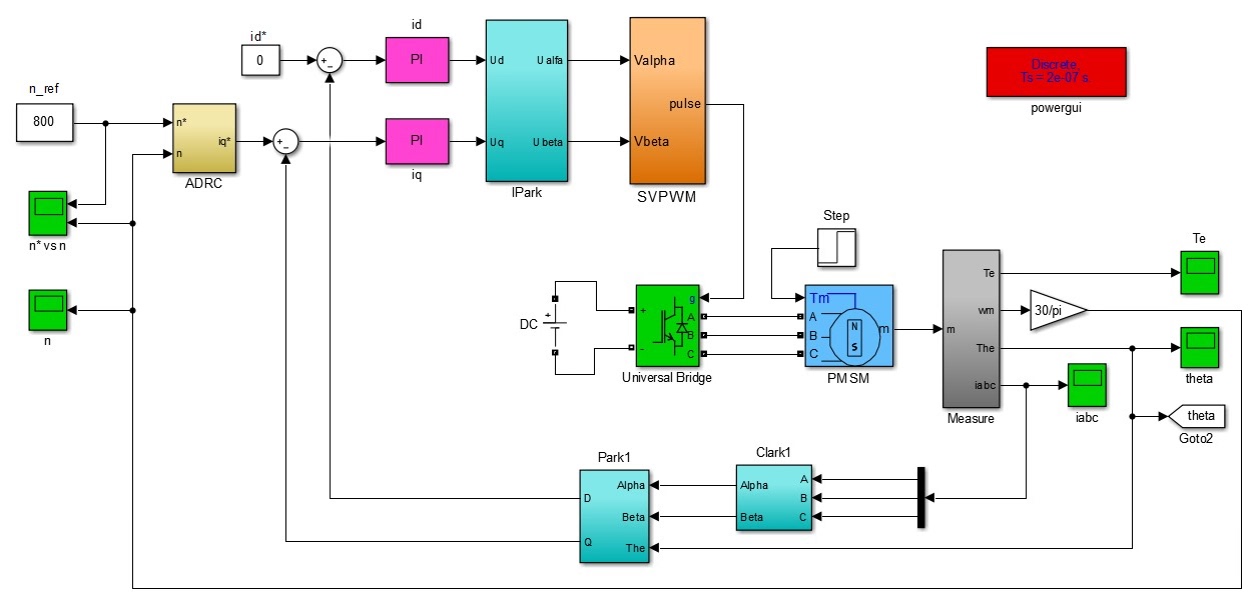
仿真模型由多个关键模块组成:
- DC直流源:为系统提供直流电能。
- 三相逆变桥:将直流转换为三相交流,驱动PMSM。
- PMSM永磁同步电机:整个系统的被控对象。
- ADRC自抗扰控制器:负责转速环控制。
- PI比例积分控制器:用于电流环控制。
- Park变换、Park反变换、Clark变换:实现不同坐标系下的变换,方便控制算法的实现。
- 测量模块:采集电机的转速、电流等信号。
- 显示模块:直观展示系统的运行结果。
这些模块功能明确,相互协作,构成了完整的PMSM控制系统仿真模型。
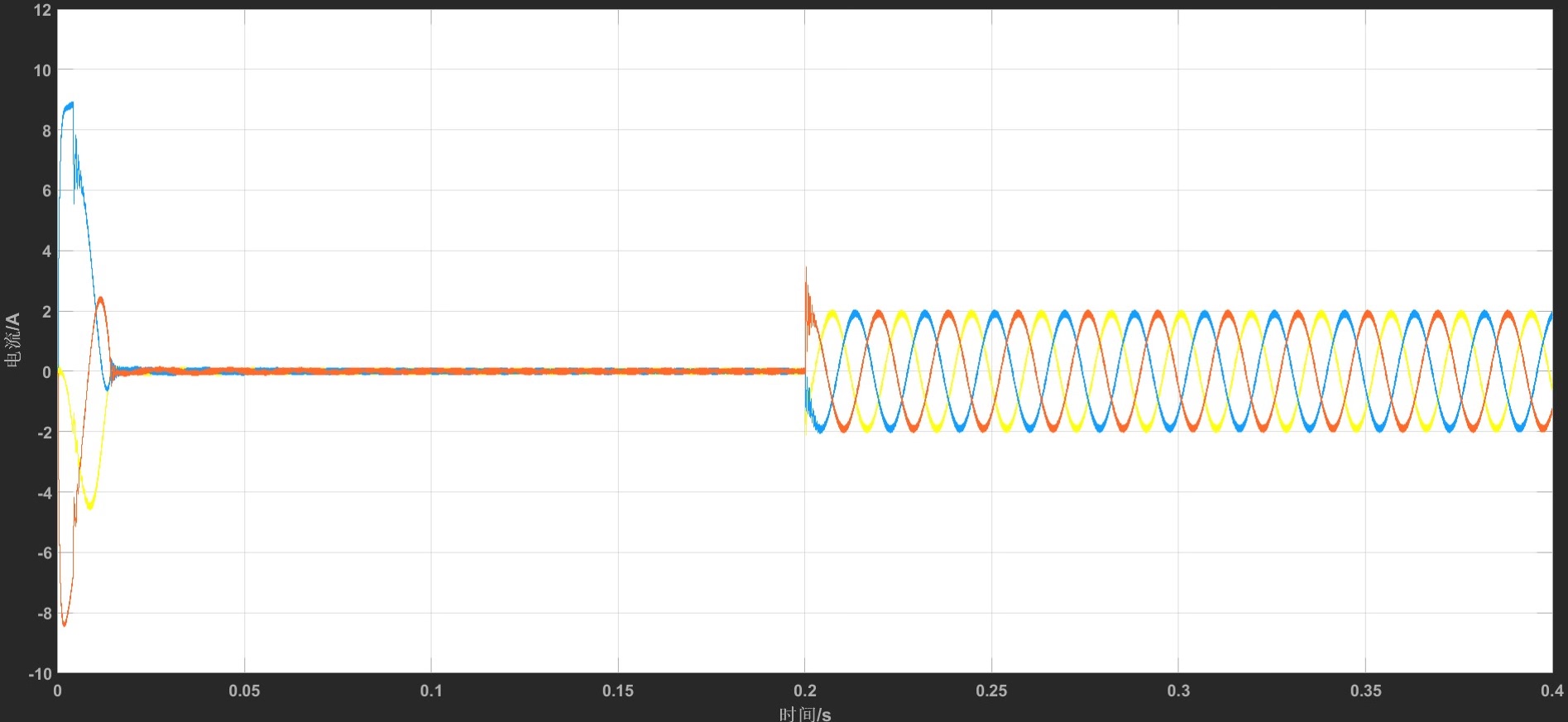
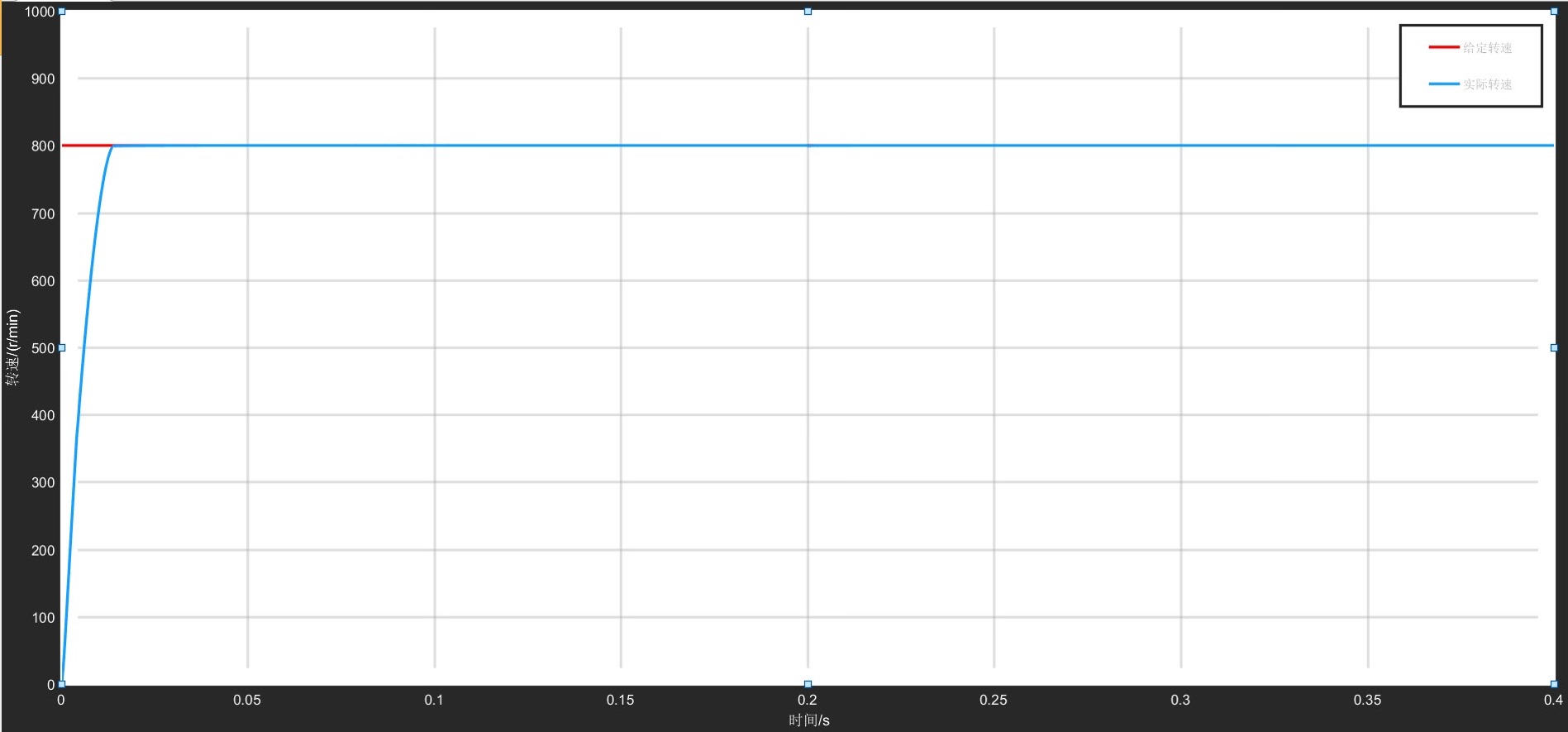
仿真结果 - 跟踪性能良好
经过仿真测试,该系统展现出良好的跟踪性能。转速能够快速跟踪给定值,且在负载扰动下仍能保持稳定。这得益于ADRC对外界扰动的有效估计和补偿,以及双闭环控制结构的合理设计。
参考文献
- 《永磁同步电机调速系统建模与控制》,详细介绍了PMSM的数学模型和各类控制策略,为深入理解PMSM控制提供基础。
- 《自抗扰控制技术——估计补偿不确定因素的控制技术》,全面讲解ADRC的原理与应用,是学习ADRC的重要参考资料。
希望通过这次分享,大家对PMSM的自抗扰控制有更清晰的认识,在实际项目中能灵活运用相关技术。
【PMSM自抗扰控制】 PMSM 永磁同步电机 ADRC 自抗扰控制 matlab simulink 仿真 (1)采用转速、电流双闭环控制; (2)外环转速环,采用ADRC控制器控制; (3)内环电流环,采用PI控制; (4)采用SVPWM矢量控制; (5)跟踪性能良好; (6)仿真模型涉及DC直流源、三相逆变桥、PMSM永磁同步电机、ADRC自抗扰控制器、PI比例积分控制器、Park变换、Park反变换、Clark变换、测量模块、显示模块等构成; (7)各个模块功能分类明确,容易理解 送相关参考文献!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 1
1 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)