两相交错并联buck/boost变换器仿真那些事儿
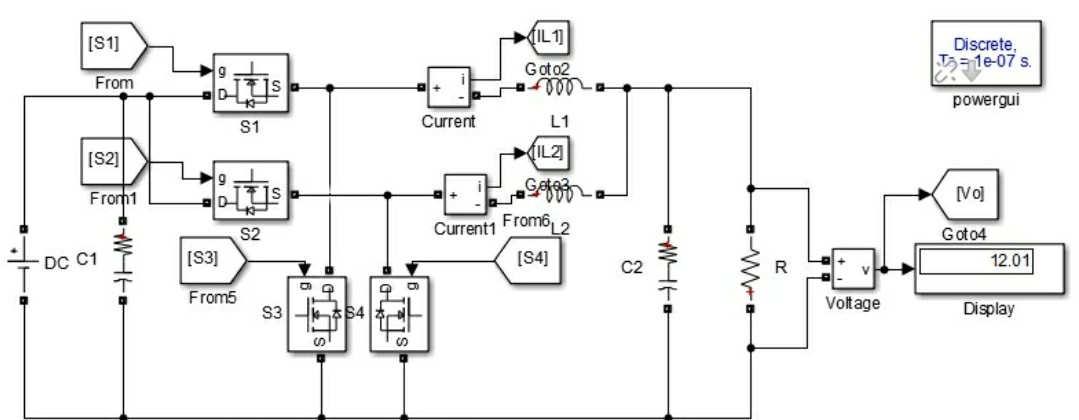
两相交错并联buck/boost变换器仿真 采用双向结构,管子均为双向管 模型内包含开环,电压单环,电压电流双闭环三种控制方式 两个电感的电流均流控制效果好 matlab/simulink/plecs仿真
在电力电子领域,交错并联buck/boost变换器因其独特优势备受关注。今天咱就唠唠两相交错并联buck/boost变换器仿真,它采用的可是双向结构,管子全是双向管哦。
控制方式大揭秘
- 开环控制
开环控制简单直接,就像是一辆车按照预设路线行驶,不管路上情况怎么变都不调整。在变换器里,开环控制不依赖输出反馈来调整输入。
在Matlab/Simulink搭建开环模型时,基本就是电源、双向管、电感、电容这些元件简单连接。比如在Simulink库中找到电源模块设置好电压,双向管模块设定合适的导通参数,电感电容按设计值设置。这时候变换器就按设定好的参数工作,输出电压完全取决于电路参数,没有反馈调整机制。
% 这里简单示意下参数设置,实际需按具体电路设计
Vdc = 48; % 直流输入电压
L = 1e - 3; % 电感值
C = 100e - 6; % 电容值这段代码简单设置了电源电压、电感值和电容值,这些值直接决定了开环下变换器的输出特性。
- 电压单环控制
电压单环控制像是给车装了个能看目的地距离的设备,根据距离调整车速。它通过检测输出电压并与设定值比较,误差经过控制器调整来改变变换器的工作状态。
在Simulink中搭建电压单环控制模型,需要加入电压反馈环节和控制器模块。一般用PI控制器,它能快速有效地减小输出电压与目标值的偏差。
% PI控制器参数设置
Kp = 0.5; % 比例系数
Ki = 10; % 积分系数这里设置了PI控制器的比例和积分系数,比例系数决定对误差的快速响应程度,积分系数则用于消除稳态误差,两者配合让输出电压稳定在目标值附近。
- 电压电流双闭环控制
电压电流双闭环控制好比给车不仅装了看距离的,还装了感知路况(电流)的设备,全方位调整行驶状态。它在电压单环基础上加入电流内环,先对电流进行快速调节,再通过电压外环保证输出电压稳定。
两相交错并联buck/boost变换器仿真 采用双向结构,管子均为双向管 模型内包含开环,电压单环,电压电流双闭环三种控制方式 两个电感的电流均流控制效果好 matlab/simulink/plecs仿真
搭建双闭环模型时,电流内环同样常用PI控制器,快速响应负载电流变化,防止电流过大或过小。电压外环再对整体输出电压进行微调。
% 电流内环PI参数
Kp_i = 0.1;
Ki_i = 5;
% 电压外环PI参数
Kp_v = 0.5;
Ki_v = 10;分别设置了电流内环和电压外环PI控制器参数,内环参数注重快速响应电流变化,外环参数注重稳定输出电压。
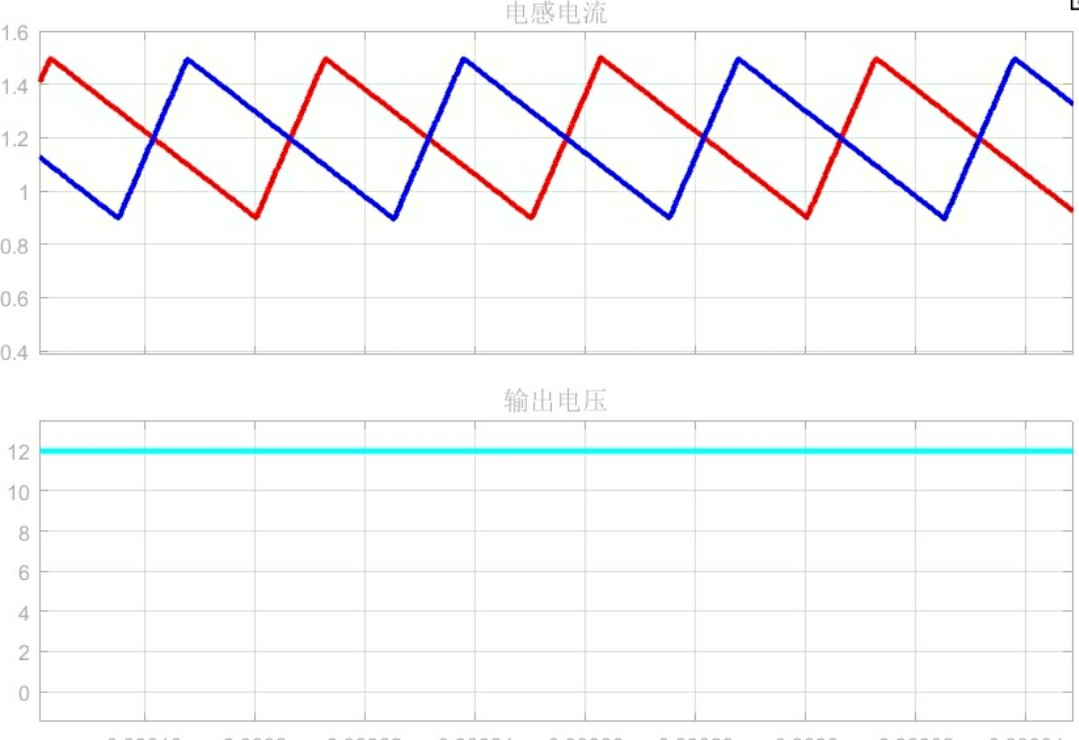
均流控制超赞
这个变换器两个电感的电流均流控制效果那是相当好。均流控制保证两个电感分担的电流均匀,就像两个人抬东西,力量分配均匀,东西才能稳稳当当。
在Simulink模型中,可以通过一些均流算法实现。比如采用平均电流控制法,实时检测两个电感电流,计算平均值,再通过控制信号调整双向管导通时间,让两个电感电流尽量相等。
% 简单示意均流算法中的电流检测与计算部分
iL1 = getInductorCurrent(1); % 获取电感1电流
iL2 = getInductorCurrent(2); % 获取电感2电流
avg_iL = (iL1 + iL2)/2; % 计算平均电流这段代码模拟获取两个电感电流并计算平均值,为后续均流调整提供依据。
仿真工具选谁好
Matlab/Simulink/PLECS都是仿真利器。Matlab/Simulink功能强大,库丰富,搭建模型方便,像上面提到的各种控制方式模型搭建都很容易上手。而PLECS在电力电子仿真方面专业性强,对电力电子元件的模拟更精准。
总之,通过对两相交错并联buck/boost变换器不同控制方式的研究和均流控制的实现,再借助Matlab/Simulink或PLECS这些仿真工具,能更好地理解和优化变换器性能,为实际应用打下坚实基础。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 3
3 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)