PMSM永磁同步电机矢量控制Simulink模型:PI与滑模变结构速度环的激情碰撞
PMSM永磁同步电机矢量控制simulink模型,包括matlab模型,两种方案对比,分别为速度环采用pi和滑模变结构对比,电流环采用pi滞环,搭建过程清晰且包含说明文档和其他附带参考资料。
嘿,各位电机控制领域的小伙伴们!今天咱来唠唠PMSM永磁同步电机矢量控制Simulink模型里,速度环采用PI和滑模变结构这两种方案的对比,电流环咱用PI滞环,整个模型搭建过程那叫一个清晰,还附上说明文档和其他参考资料,包你看得明明白白!
一、模型搭建的基础:为啥选PMSM矢量控制?
PMSM因为其高效率、高功率密度等优点,在工业、新能源汽车等领域那是相当吃香。而矢量控制就像是它的“智慧大脑”,能把交流电机模拟成直流电机来控制,让控制性能大幅提升。
二、电流环:PI滞环的奥秘
电流环采用PI滞环控制,这是相当经典的组合。先来看代码示例(这里以Matlab伪代码为例):
% PI控制器参数设置
Kp = 0.5;
Ki = 0.1;
integral = 0;
previous_error = 0;
% 假设电流反馈值和参考值
current_ref = 10;
current_fb = 8;
% PI计算
error = current_ref - current_fb;
integral = integral + error;
output = Kp * error + Ki * integral;
% 滞环比较环节
hysteresis_band = 0.5;
if output > current_fb + hysteresis_band
% 输出控制信号使电流增大
control_signal = 1;
elseif output < current_fb - hysteresis_band
% 输出控制信号使电流减小
control_signal = -1;
else
% 保持当前状态
control_signal = 0;
end这里PI控制器通过比例和积分环节,对电流误差进行调节,让实际电流尽可能跟踪参考电流。滞环比较器就像一个“守门员”,在一定带宽内,控制电流的变化,防止电流波动过于剧烈。
三、速度环:PI vs 滑模变结构
(一)PI速度环
PI速度环也是常见的控制方式。代码如下:
% 速度PI控制器参数
Kp_speed = 1;
Ki_speed = 0.05;
integral_speed = 0;
previous_speed_error = 0;
% 速度参考值和反馈值
speed_ref = 1000; % 单位:rpm
speed_fb = 900;
% 速度PI计算
speed_error = speed_ref - speed_fb;
integral_speed = integral_speed + speed_error;
speed_output = Kp_speed * speed_error + Ki_speed * integral_speed;它和电流环PI类似,通过调节速度误差,让电机转速逼近参考值。不过PI控制对系统参数变化比较敏感,要是电机参数有变动,控制效果可能就大打折扣。
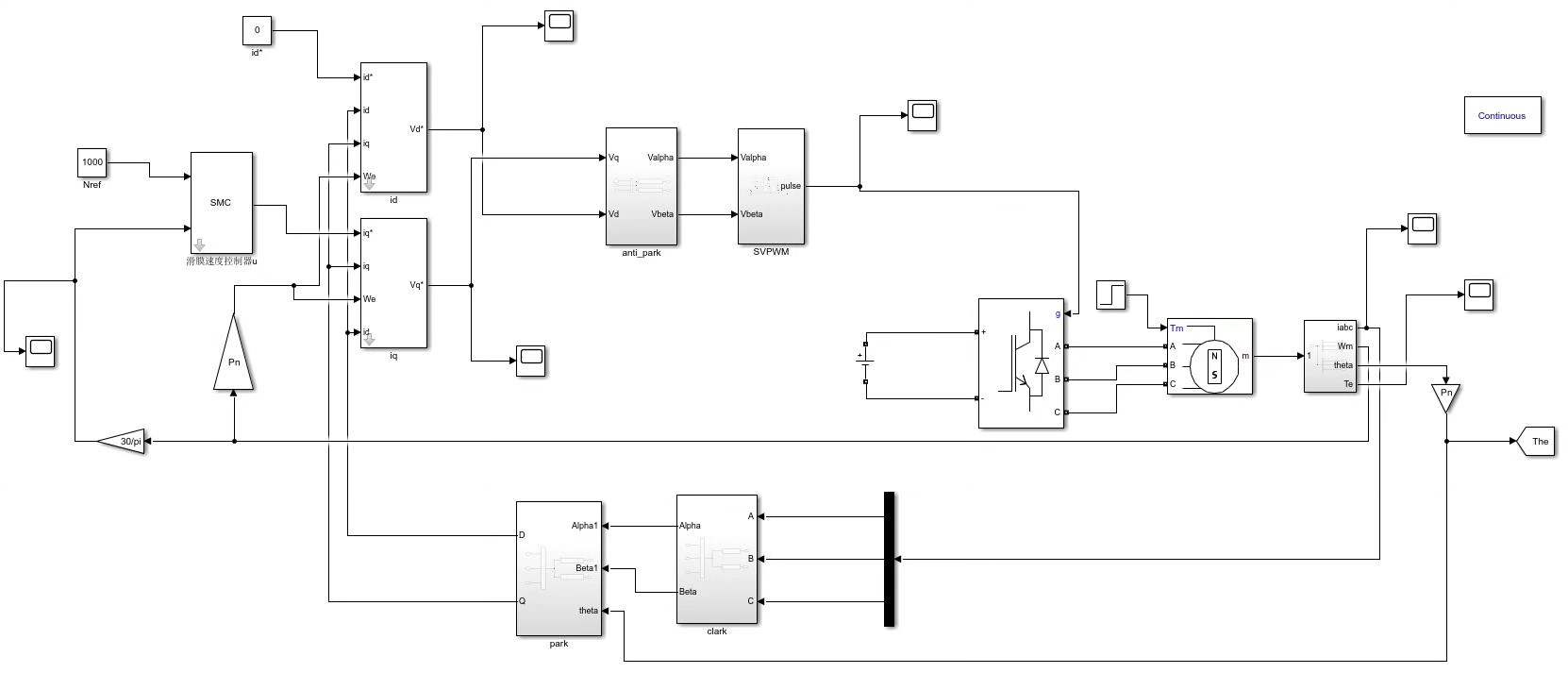
(二)滑模变结构速度环
滑模变结构控制就像给电机控制加了个“自适应护盾”。来看代码(简单示意):
% 滑模控制参数
k = 10;
lambda = 0.5;
s = 0;
% 速度参考值和反馈值
speed_ref = 1000;
speed_fb = 900;
% 滑模面设计
s = lambda * (speed_ref - speed_fb) + diff(speed_ref - speed_fb);
% 控制律计算
if s > 0
control_signal = k;
else
control_signal = -k;
end滑模变结构控制通过设计滑模面,让系统状态沿着滑模面运动,对外界干扰和参数变化有很强的鲁棒性。它的控制律会根据系统状态在不同的“模式”间切换,就像汽车换挡一样,以适应不同的工况。
四、模型搭建过程及说明文档
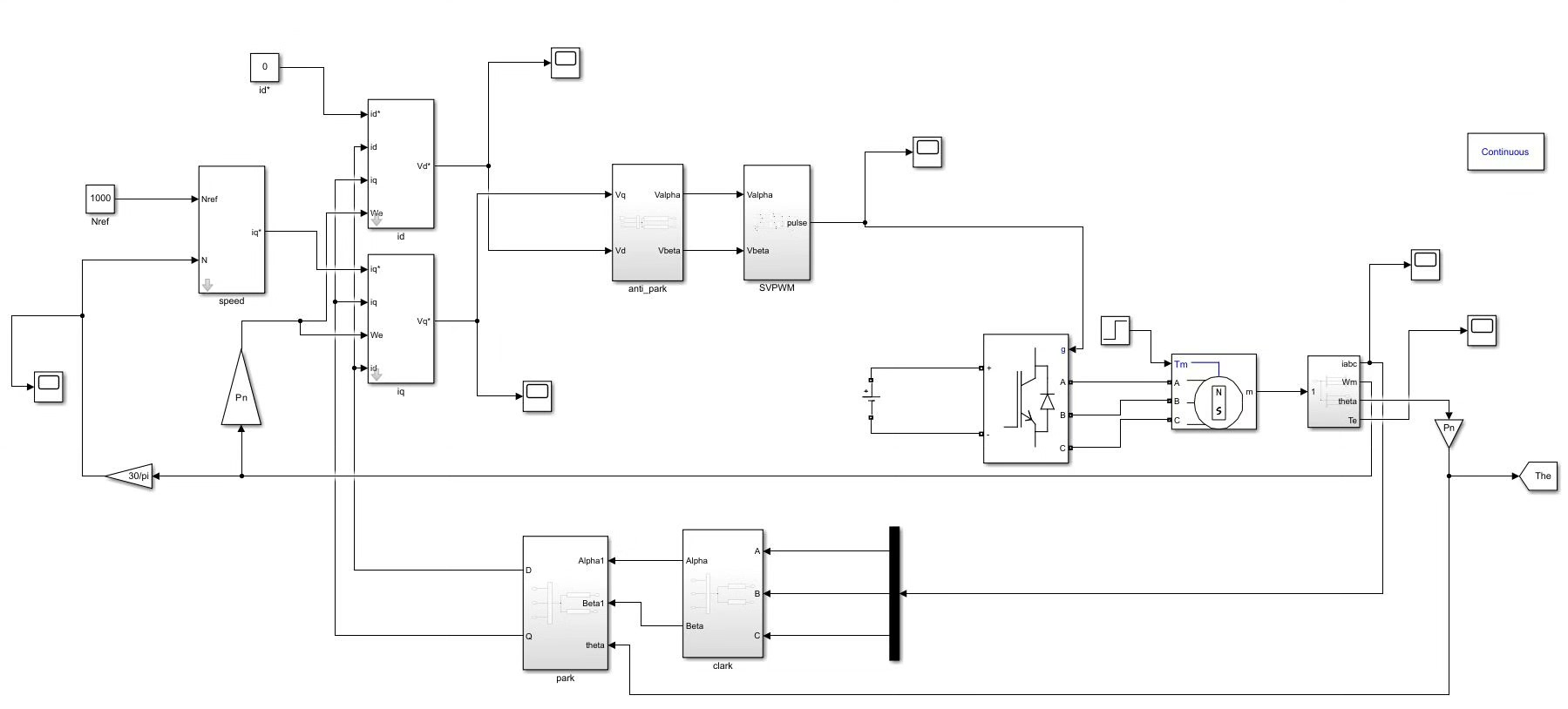
在Simulink里搭建模型时,首先要构建电机模块,设置好电机参数,这就像给电机赋予“生命”。接着连接电流环和速度环模块,按照前面的控制算法进行参数设置。每个模块之间的信号流向都要捋清楚,就像搭积木,一块都不能错。
PMSM永磁同步电机矢量控制simulink模型,包括matlab模型,两种方案对比,分别为速度环采用pi和滑模变结构对比,电流环采用pi滞环,搭建过程清晰且包含说明文档和其他附带参考资料。
说明文档里,详细记录每个模块的功能、参数设置依据,以及整个模型的工作原理。比如电流环PI滞环为啥选这样的参数,速度环PI和滑模变结构各自的优缺点在哪。这不仅方便自己以后回顾,也能让其他小伙伴快速上手。
五、附带参考资料
为了让大家更深入理解,还准备了一些参考资料,像相关的学术论文、经典的电机控制教材。学术论文里有最前沿的研究成果,教材则能夯实基础理论。这些资料就像武功秘籍,助你在PMSM矢量控制的江湖里修炼得更厉害。
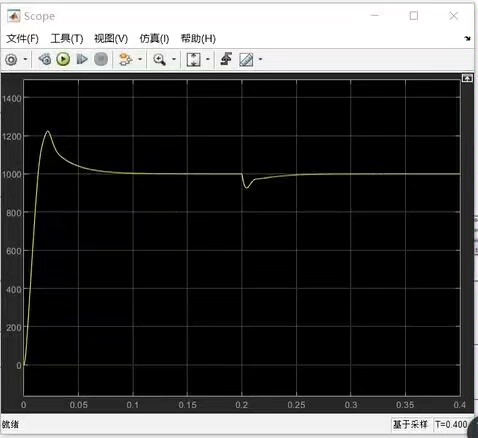
通过这次对PMSM永磁同步电机矢量控制Simulink模型两种速度环方案的对比,相信大家对电机控制又有了新的认识。希望大家在实际应用中,能根据具体需求,挑选最合适的控制方案,让电机转得更稳、更快!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 5
5 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)