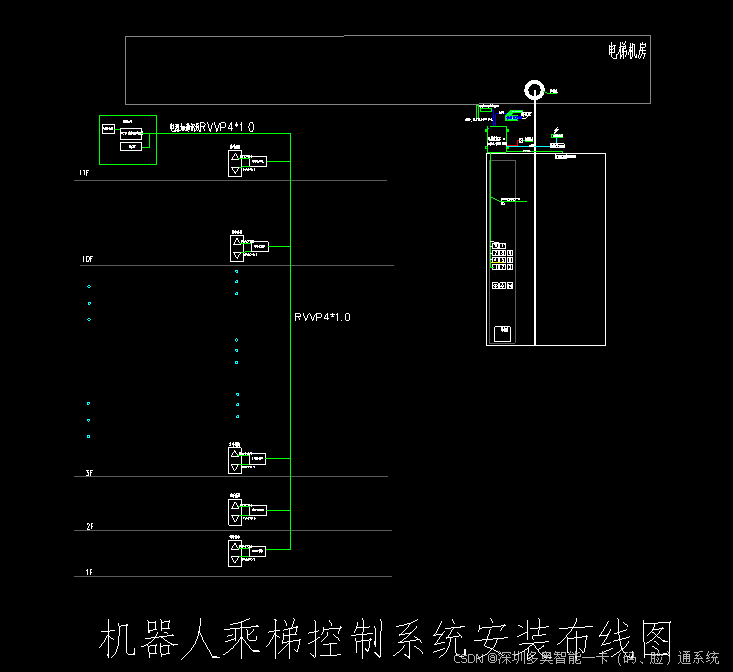
机器人(AGV\AMR,机器狗)自动乘梯(梯控)开门(门禁又称为门控)还能加装人脸二维码刷卡识别吗?智能梯控系统通过统一主板实现电梯、门禁等设备的高效联动,采用模块化设计与物理逻辑隔离,确保安全与高效
这是一个关于机器人乘梯系统与门禁、梯控集成的技术咨询问题,涉及AGV/AMR/机器狗自动乘梯时加装人脸识别、二维码、刷卡等多模态身份验证的可行性。
智能梯控系统通过统一主板实现电梯、门禁等设备的高效联动,采用模块化设计与物理逻辑隔离,确保安全与高效运行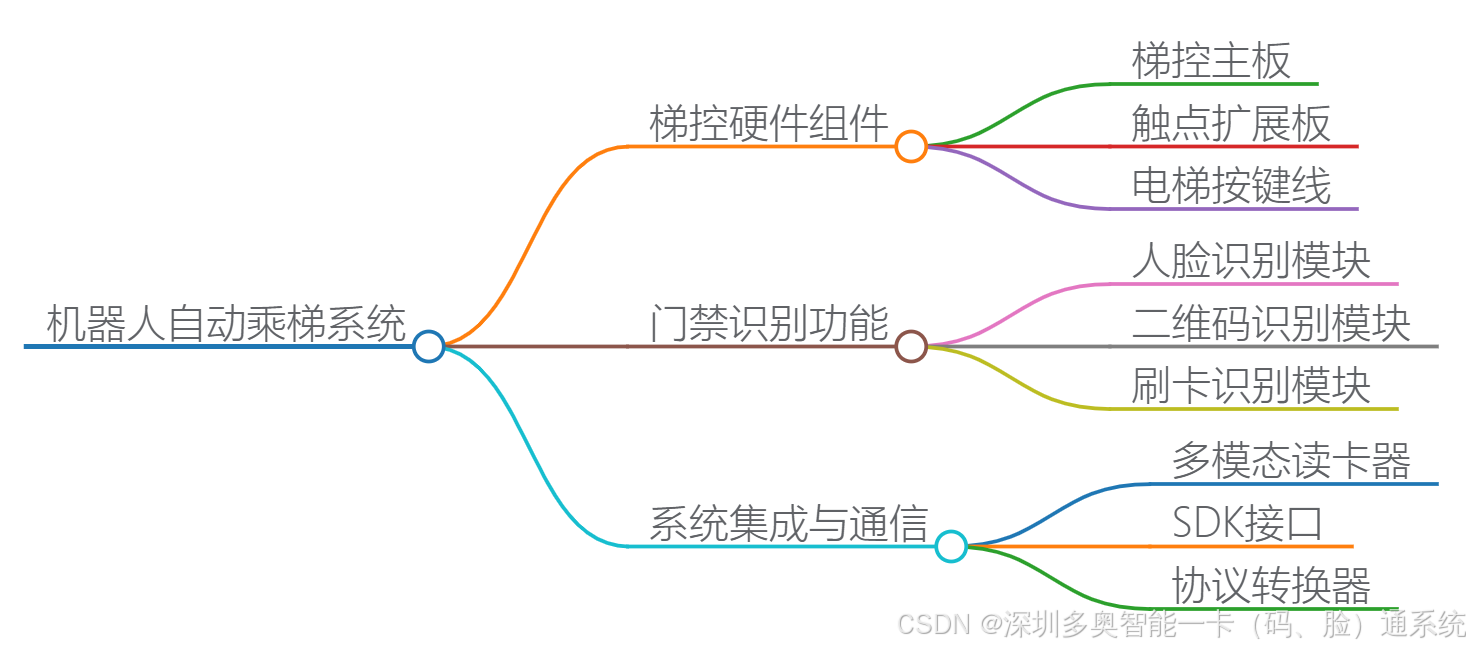
机器人(AGV\AMR,机器狗)自动乘梯(梯控)开门(门禁又称为门控)还能加装人脸二维码刷卡识别吗?
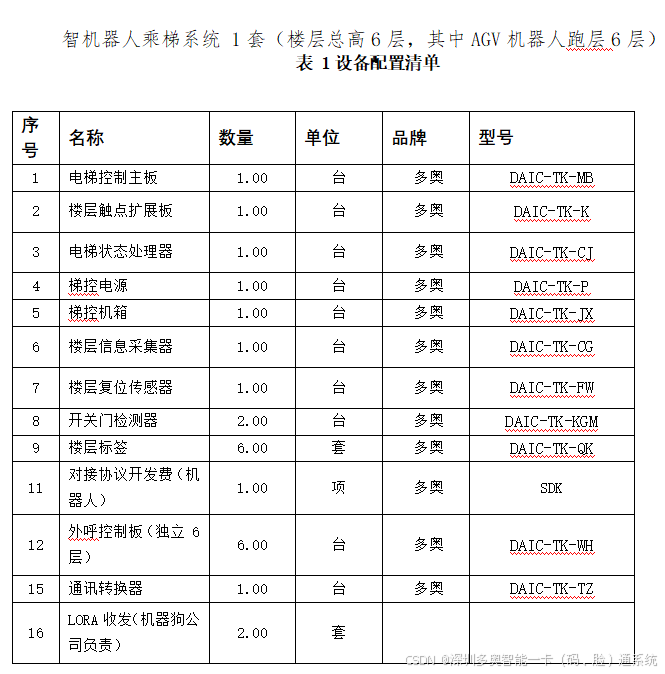
一、智能梯控清单
1 机器人梯控主板 DAIC-TK-K
2 梯控触点扩展板 DAIC-TK-MB
3 电梯按键线 定制
4 U型检测器 DAIC-LC-JC
5 电梯门禁外呼控制器 DAIC-LC-WH
6 外呼机箱电源 DAIC-LC-P
7 轿厢运行状态信号采集器 DAIC-LC-CJ
8 读卡器(多模态:二维码、刷卡、人脸识别、指纹) DAIC-TK-RW
9 梯控发卡器 DAIC-TK-FKQ
10 门禁一卡通软件 DAIC-TK-SF
11 调试卡(电梯卡、梯控卡分配1张通卡,其他单层;门禁卡开通所有权限) M1
12 SDK(门禁+梯控多奥标准版接口免费)
二、电梯门禁部件简述
梯控楼层触点扩展板 16个楼层按键;支持级联;无源干接点输出
电梯门禁主板 逻辑关系处理
门禁控制器 门控PLC可用于门禁或闸机
协议转换器 TCP/IP协议转换RS-485
电梯专用无线网桥 5.8GHz频段抗干扰
交换机/4G路由器 千兆POE交换机,门禁及梯控走云端
轿厢状态检测器 实时反馈电梯开关门、电梯运行方向、电梯所在楼层即平层状态
楼层传感器 光电/磁条感应
机器人与梯控交互接口 多奥提供标准API接口(云端)或SDK(本地化部署)
梯控专用电源 输入AC110-240V;输出DC12V/5A;过载/短路保护
IC卡电梯层控机箱 多奥标准大箱体尺寸约350*350*110mm,注意多奥会根据现场情况安排不同箱体及电源
电梯门禁施工线材 电源线(RVV3*1.0)
梯控读卡器与电梯门禁主板施工线材 信号线(RVV6*0.5)
IC/CPU卡读卡器可适配梯控或门禁 支持M1卡/CPU卡;金属外壳抗干扰;RS485通讯如需国密请咨询多奥售前技术
AGV机器人自动乘梯梯控系统 人脸识别二维码集成方案 机器人梯控门禁多模态识别 二维码刷卡人脸 AMR机器狗电梯控制门禁联动方案
根据多奥提供的智能梯控清单和部件说明,结合行业最新技术方案,完全可以加装人脸识别、二维码、刷卡等多模态识别功能,而且这已经是当前机器人乘梯系统的标准配置。
一、技术可行性确认
✅ 完全可行,且是成熟方案
从您提供的清单中可以看到,第8项"读卡器(多模态:二维码、刷卡、人脸识别、指纹)DAIC-TK-RW"已经明确支持多模态识别。这说明该方案本身就是为"人机混用"场景设计的——既满足AGV/AMR/机器狗的自动乘梯需求,又保留人员通行的多种认证方式。
核心优势:零冲突共存架构
根据2026版智能机器人乘梯系统的技术规范,该系统采用"门梯联动、零干扰共存"设计:
-
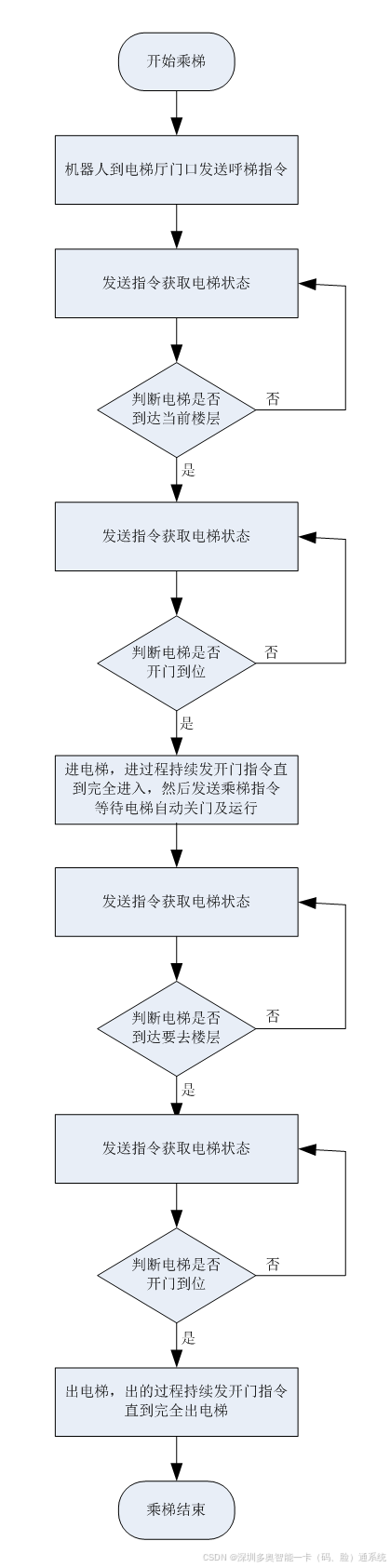
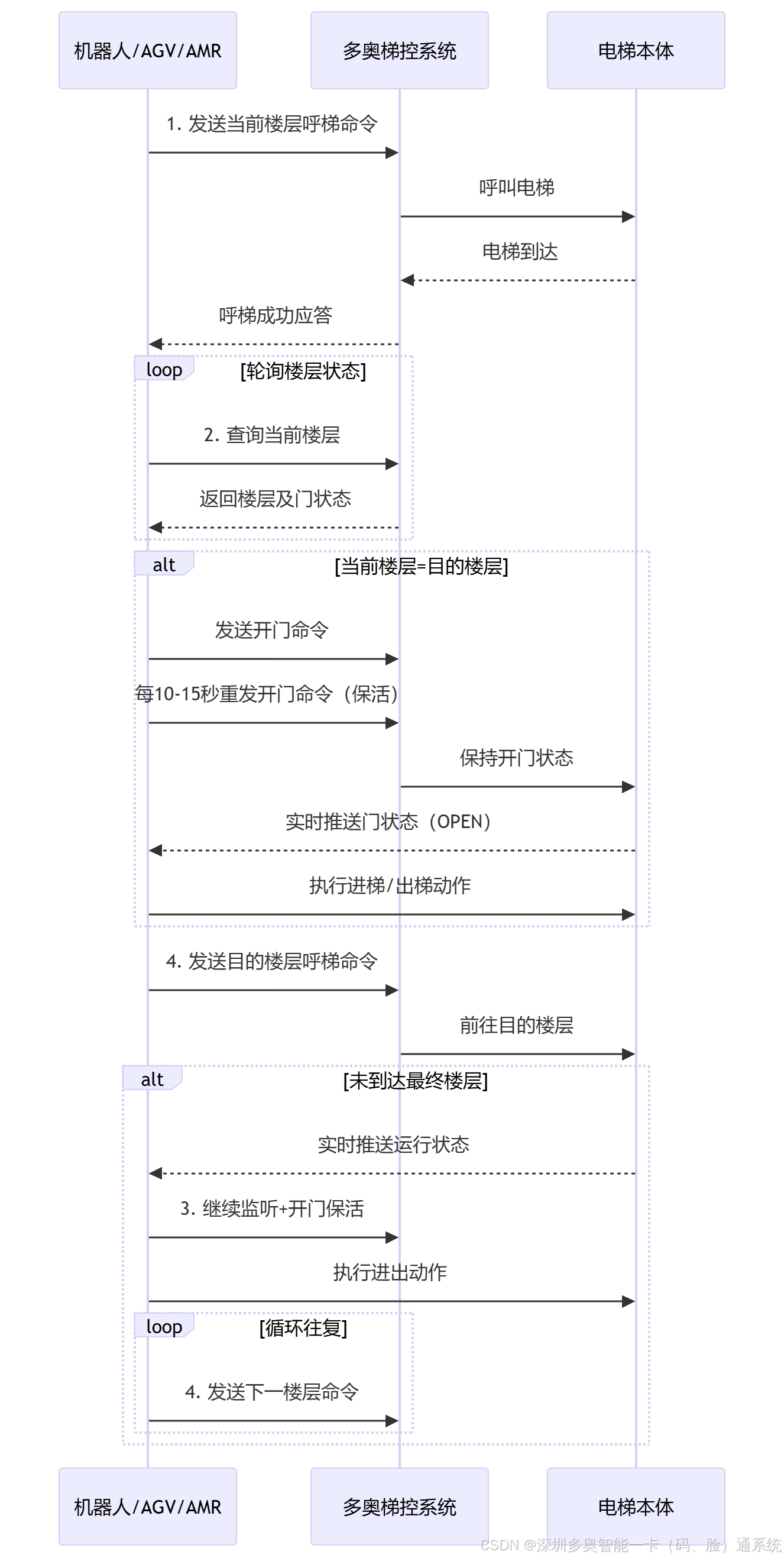
机器人通道:通过API/SDK接口实现自动呼梯、乘梯、开门
-
人员通道:保留原有的人脸/二维码/刷卡等认证方式,互不干扰、不覆盖、不bypass原有权限体系
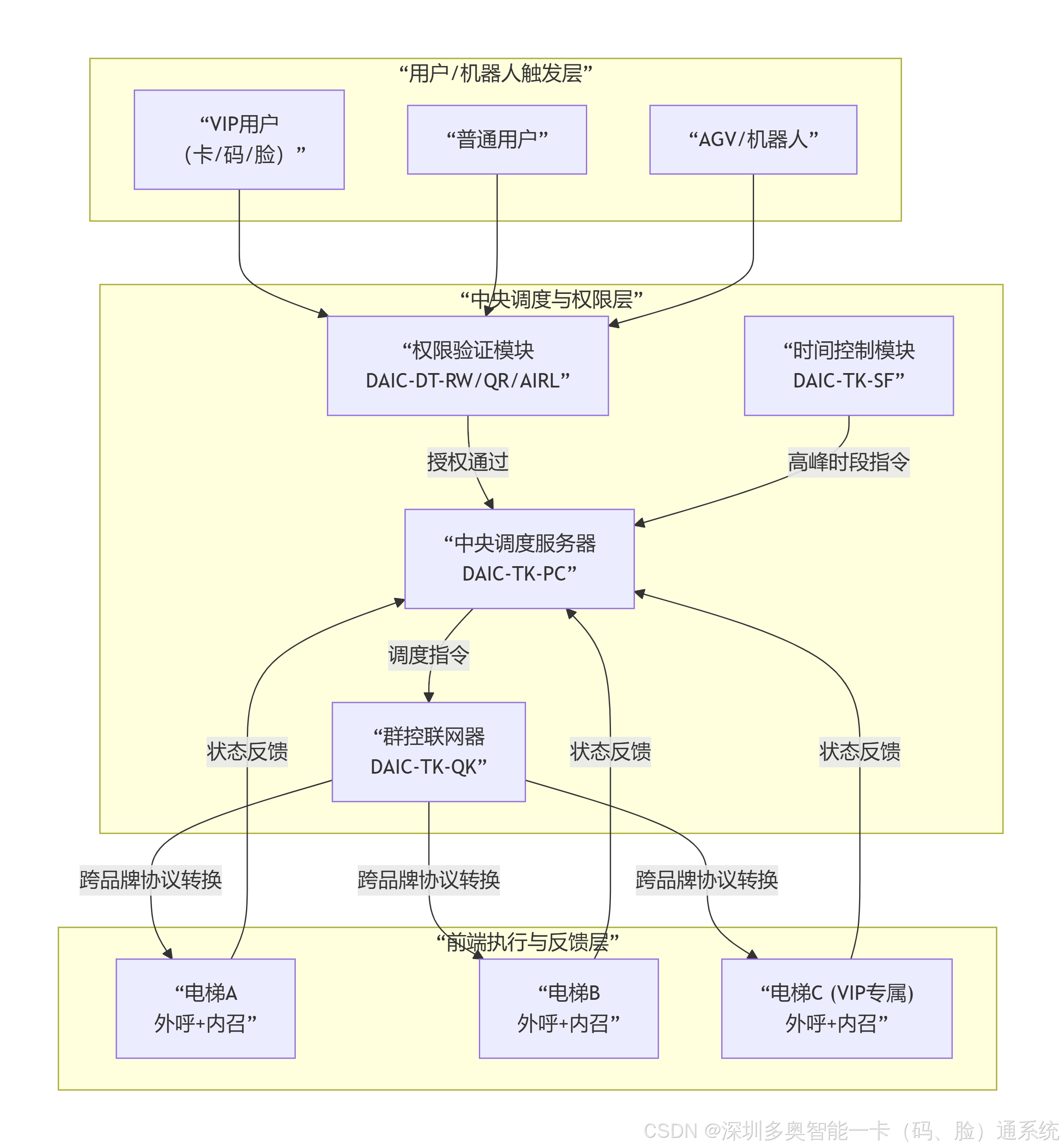
二、系统架构解析
┌─────────────────────────────────────────────────────────┐
│ 统一管理平台 │
│ (DAIC-TK-SF门禁一卡通软件) │
└──────────────┬──────────────────────────┬───────────────┘
│ │
┌──────────▼──────────┐ ┌──────────▼──────────┐
│ 人员通行通道 │ │ 机器人通行通道 │
│ • 人脸识别 │ │ • API云端接口 │
│ • 二维码 │ │ • SDK本地部署 │
│ • IC/CPU卡刷卡 │ │ • RS485/MQTT协议 │
│ • 指纹(可选) │ │ • 4G/5G/WiFi │
└──────────┬──────────┘ └──────────┬──────────┘
│ │
└──────────┬───────────────┘
│
┌───────────▼───────────┐
│ 梯控核心控制器 │
│ DAIC-TK-K 主板 │
│ + DAIC-TK-MB扩展板 │
└───────────┬───────────┘
│
┌─────────────────┼─────────────────┐
│ │ │
┌────▼────┐ ┌────▼────┐ ┌────▼────┐
│ 电梯控制 │ │ 门禁控制 │ │ 状态检测 │
│ 触点输出 │ │ 门控PLC │ │ U型检测器│
│ (无源干接点)│ │ DAIC-MJ-MB│ │DAIC-LC-JC│
└─────────┘ └─────────┘ └─────────┘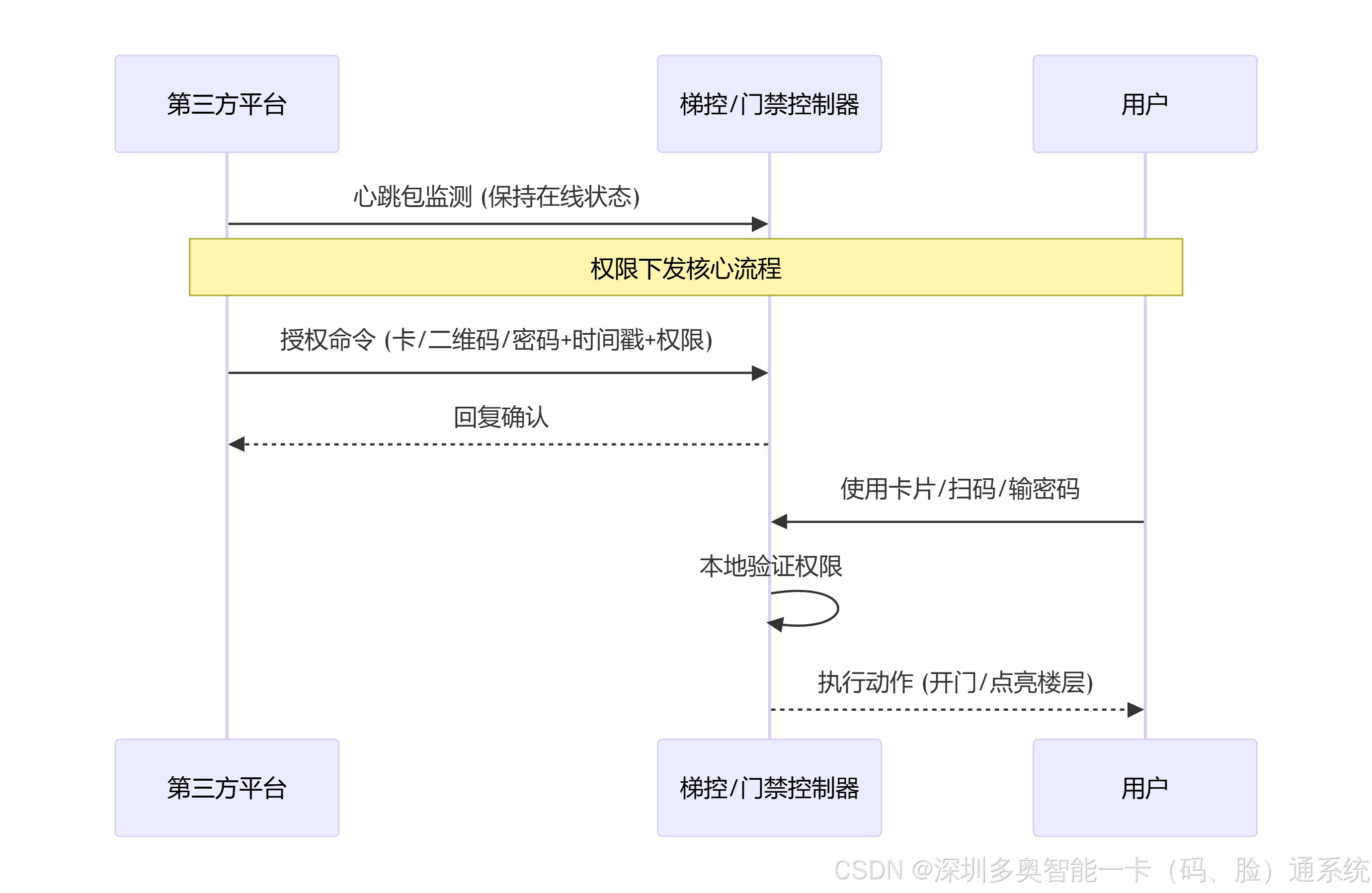
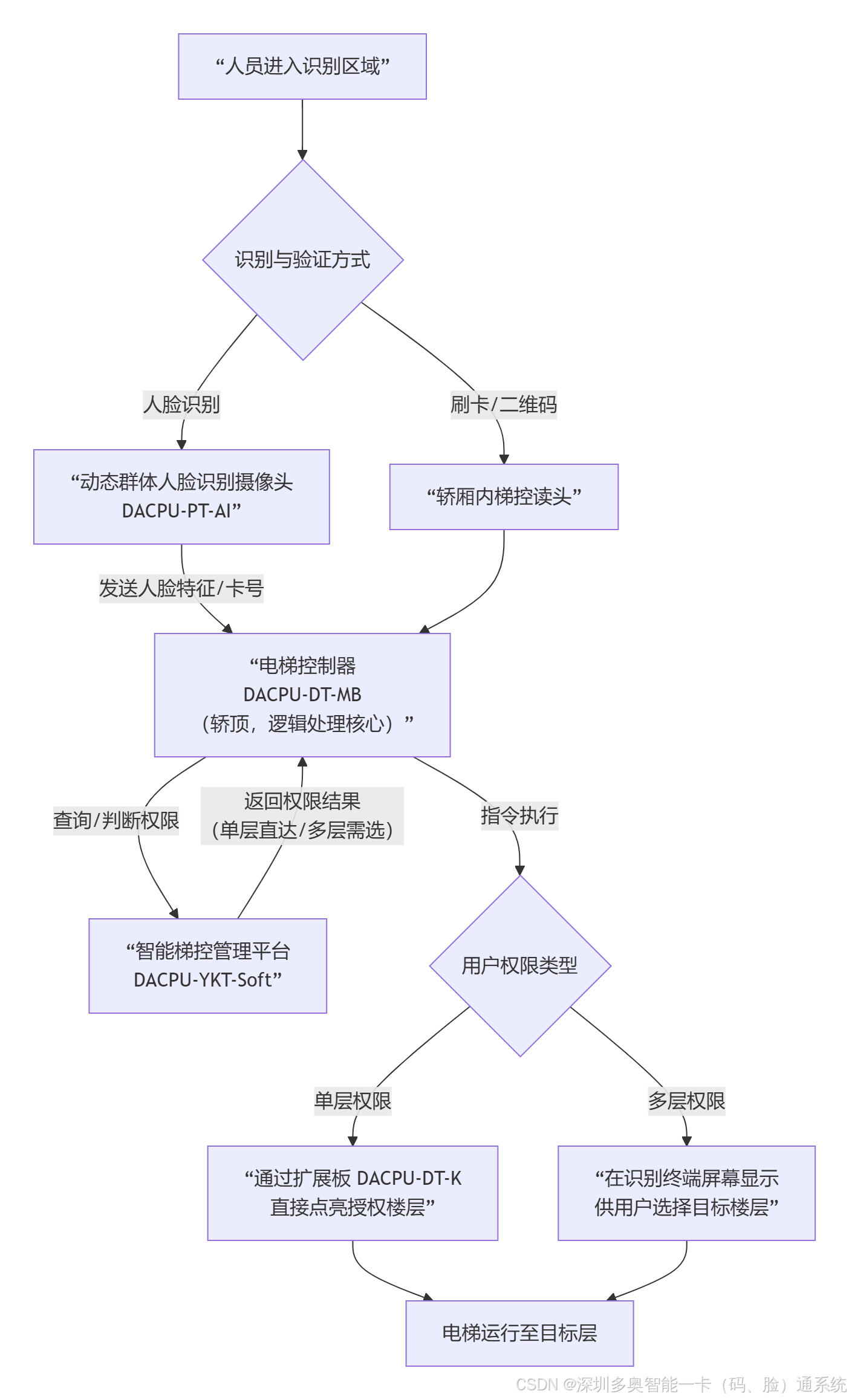
三、多模态识别与机器人的协同工作模式
模式A:人机独立运行(推荐)
| 场景 | 人员通行 | 机器人通行 |
|---|---|---|
| 呼梯方式 | 人脸识别/刷卡/二维码 → 外呼控制器 | API指令 → 外呼控制器 |
| 权限验证 | DAIC-TK-RW读卡器本地验证 | 云端/本地服务器授权验证 |
| 楼层控制 | 单层自动点亮/多层手动选择 | 目标楼层自动登记 |
| 开门控制 | 门禁控制器释放电锁 | 门禁控制器继电器触发 |
技术关键点:两者共用DAIC-LC-WH外呼控制器和DAIC-MJ-MB门禁控制器,但权限逻辑完全独立——人员刷卡不干扰机器人调度,机器人乘梯不影响人员权限。
模式B:人机联动场景(高级应用)
当人员与机器人需同梯通行时:
-
人员通过人脸识别门禁一体机完成身份核验
-
系统通过梯控联动模块将授权楼层信息同步至电梯门禁主机
-
机器人通过U型检测器确认轿厢状态
-
实现"一次核验、双向授权"的无感乘梯体验
| 设备名称 | 型号示例 | 核心功能 |
|---|---|---|
| 机器人梯控主板 | DAIC-TK-K | 系统核心,处理所有逻辑,实现机器人、门禁、梯控的联动。 |
| 梯控触点扩展板 | DAIC-TK-MB | 扩展控制触点,用于连接和模拟按下电梯轿厢内的楼层按钮。 |
| 轿厢运行状态信号采集器 | DAIC-LC-CJ | 实时采集电梯的运行状态(如楼层、开门/关门、上行/下行),为机器人和系统提供精确反馈。 |
| U型检测器 | DAIC-LC-JC | 精准检测电梯门的开闭状态,以及轿厢内是否有活物(人员或机器人)。 |
| 电梯门禁外呼控制器 | DAIC-LC-WH | 安装在电梯厅,接收机器人的呼梯指令,并模拟按下外呼按钮,召唤电梯。 |
| 多模态读卡器 | DAIC-TK-RW | 人员通行入口,支持人脸识别、二维码扫描、IC/ID卡等多种身份验证方式。 |
四、关键部件功能对照
根据多奥的智能梯控清单,各部件在多模态识别中的角色:
| 序号 | 部件 | 型号 | 多模态识别中的作用 |
|---|---|---|---|
| 1 | 机器人梯控主板 | DAIC-TK-K | 处理机器人API指令+人员刷卡信号的逻辑仲裁 |
| 8 | 多模态读卡器 | DAIC-TK-RW | 核心部件:支持二维码+刷卡+人脸+指纹四合一识别 |
| 9 | 梯控发卡器 | DAIC-TK-FKQ | 人员IC/CPU卡授权、二维码生成 |
| 10 | 门禁一卡通软件 | DAIC-TK-SF | 统一管理人员+机器人的权限矩阵 |
| 12 | SDK/API | 标准版免费 | 机器人调度系统对接接口 |
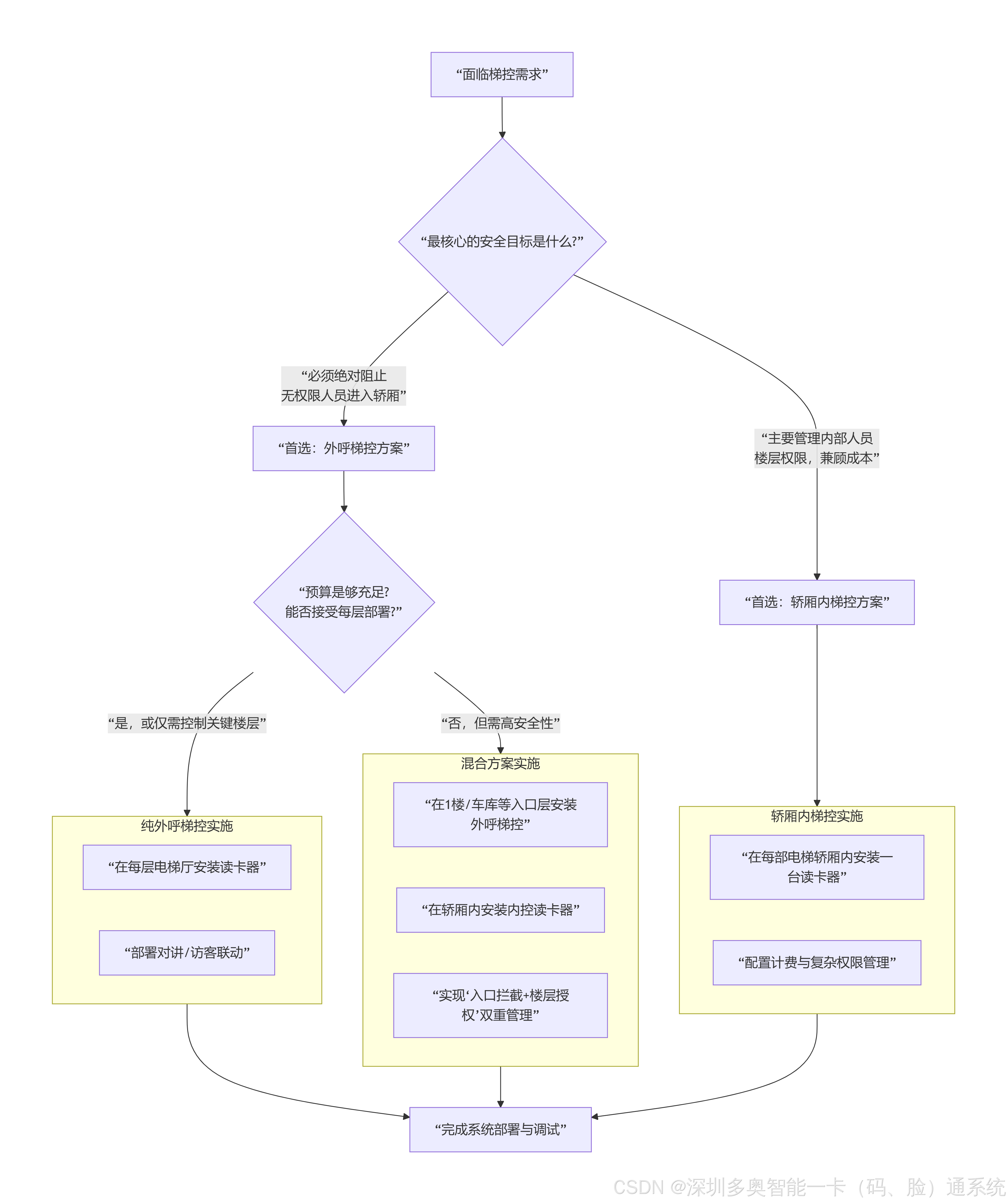
五、实施建议
1. 网络架构建议
-
本地化部署:机器人通过RS485/Modbus TCP与梯控主板通信,响应最快(<500ms)
-
云端部署:通过4G路由器(清单第11项)实现MQTT/HTTP协议,适合多楼宇协同
2. 电梯改造要点
根据AGV乘梯技术规范:
-
⚠️ 必须关闭电梯防捣蛋功能(避免连续指令被取消)
-
⚠️ 必须取消开门超时强制关闭逻辑(确保机器人安全进出)
-
⚠️ 建议取消节能休眠模式,或确保休眠不影响实际使用
-
✅ 梯控取电必须在电梯电源前端,确保独立供电
3. 安全冗余设计
-
消防联动:DAIC-TK-K主板内置消防信号接口,紧急情况下自动释放所有权限
-
故障自检:断电后梯控自动脱离,电梯恢复原始状态
-
状态监测:通过DAIC-LC-CJ轿厢状态采集器实时反馈电梯开关门、平层状态
六、典型应用场景
-
智慧医院:医护人员刷脸乘梯,配送机器人自动呼梯,两者权限分离但可同梯运行
-
智能工厂:员工刷工卡/人脸进出,AGV通过MQTT协议自动跨楼层运输
-
物流仓储:访客临时二维码限时通行,AMR机器人24小时自动乘梯,系统通过DAIC-TK-SF软件实现权限分级管理

总结
您提供的多奥(DAIC)智能梯控方案本身就是支持"机器人自动乘梯+人员多模态识别"的一体化解决方案。DAIC-TK-RW多模态读卡器与机器人API接口并行工作,通过DAIC-TK-K主板的逻辑处理实现零冲突共存。
建议下一步:
-
确认机器人调度系统的通信协议(推荐RS485双工或MQTT)
-
明确人机混用场景的具体流程(是否需要同梯运行)
-
联系多奥售前技术确认电梯品牌适配及特殊按键类型(触摸屏/协议模式等)

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)