FOC永磁同步电机矢量控制Simulink全C语言仿真模型探索
FOC 永磁同步电机矢量控制Simulink全C语言仿真模型 (1)全C永磁同步电机Foc磁场定向控制框架(Clarke Park iPark Svpwm 转速、转矩斜坡函数)在Simulink S-Function中完成C编写(非独立离散模块搭建),贴近试验工况; (2)考虑大功率开关频率低,针对IGBT导通、关断上升及下降沿设置死区,针对死区时间方便补偿; (3)提供了完整的永磁同步电机在Simulink中的Foc(开源),授之以渔,便于后续独立算法开发、实现; (4)算法程序较多采用结构体、指针,避免了全局变量的使用,状态机程序架构清晰、维护性很强,可直接粘贴到你现有DSP、ARM等平台的程序框架中,直接实现和测试应用;
在电机控制领域,FOC(磁场定向控制)永磁同步电机矢量控制是一项非常关键的技术。今天咱们就来聊聊这个超实用的Simulink全C语言仿真模型。
一、全C永磁同步电机Foc磁场定向控制框架搭建
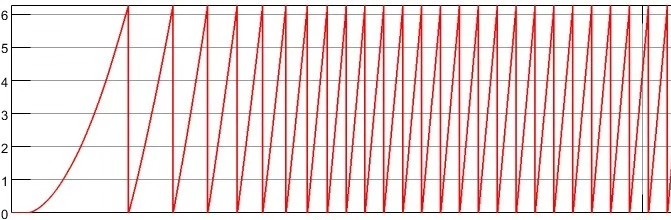
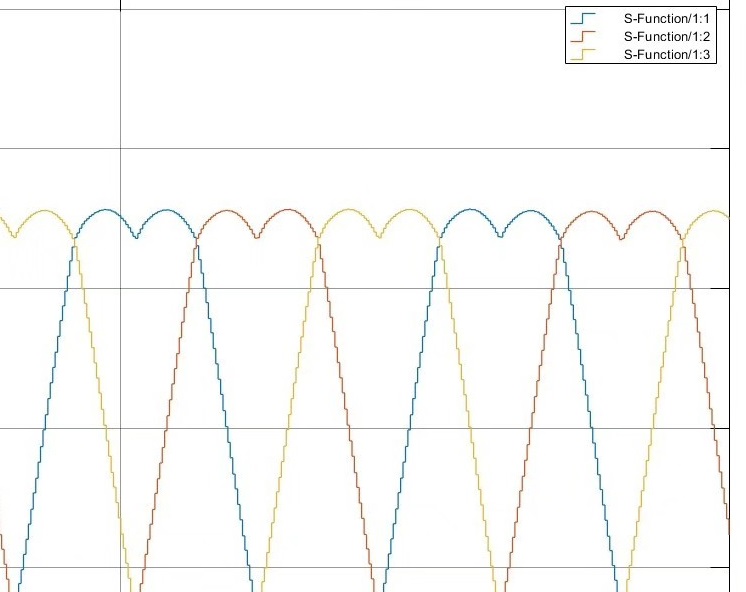
这个模型的核心部分,是在Simulink的S - Function中完成C编写的全C永磁同步电机Foc磁场定向控制框架。这里面涵盖了Clarke变换、Park变换、iPark变换、Svpwm(空间矢量脉宽调制),还有转速、转矩斜坡函数等重要环节。它没有采用那种一个个独立离散模块搭建的方式,而是直接在S - Function里用C语言写,为啥这么做呢?因为这样能更贴近实际试验工况。
就拿Clarke变换来说,代码大概长这样:
void Clarke_Transform(float id, float iq, float *alpha, float *beta) {
*alpha = id;
*beta = iq * sqrt(3) / 2;
}这段代码实现了将三相静止坐标系下的电流(这里简单假设输入为id和iq)转换到两相静止坐标系下的alpha和beta轴电流。通过这个变换,我们可以把复杂的三相电机控制问题简化到两相坐标系下处理,方便后续的控制算法实现。
FOC 永磁同步电机矢量控制Simulink全C语言仿真模型 (1)全C永磁同步电机Foc磁场定向控制框架(Clarke Park iPark Svpwm 转速、转矩斜坡函数)在Simulink S-Function中完成C编写(非独立离散模块搭建),贴近试验工况; (2)考虑大功率开关频率低,针对IGBT导通、关断上升及下降沿设置死区,针对死区时间方便补偿; (3)提供了完整的永磁同步电机在Simulink中的Foc(开源),授之以渔,便于后续独立算法开发、实现; (4)算法程序较多采用结构体、指针,避免了全局变量的使用,状态机程序架构清晰、维护性很强,可直接粘贴到你现有DSP、ARM等平台的程序框架中,直接实现和测试应用;
Park变换也是类似的原理,通过特定的三角函数关系,将两相静止坐标系下的量转换到两相旋转坐标系下,从而实现对电机磁场和转矩的解耦控制。
二、死区设置与补偿
在大功率应用场景下,开关频率往往比较低。这时候,IGBT的导通、关断上升及下降沿就需要特别关注,所以针对这些情况设置死区就很有必要。而且这个模型里,对死区时间的设置很方便进行补偿。
// 假设这里是设置死区时间的相关结构体
typedef struct {
float deadTime;
// 其他相关参数
} DeadTimeConfig;
// 死区补偿函数示例
void DeadTimeCompensation(DeadTimeConfig *config, float *pwmSignal) {
// 根据死区时间对PWM信号进行补偿计算
if (*pwmSignal > 0) {
*pwmSignal -= config->deadTime;
} else {
*pwmSignal += config->deadTime;
}
}这段代码先定义了一个死区配置结构体,里面包含死区时间等参数。然后通过DeadTimeCompensation函数,根据死区时间对PWM信号进行简单的补偿处理,确保电机控制的准确性和稳定性。
三、开源的意义与便利性
这个模型提供了完整的永磁同步电机在Simulink中的Foc实现,并且是开源的。这就像是给大家传授了钓鱼的方法(授之以渔),对于后续想要独立开发算法并实现的小伙伴来说,简直太友好了。不管是想深入研究FOC控制的原理,还是在此基础上开发新的控制策略,都有了一个非常好的起点。
四、算法程序架构优势
整个算法程序大量采用结构体和指针,这么做最大的好处就是避免了全局变量的使用。大家都知道,全局变量虽然方便,但在大型项目里很容易造成命名冲突,而且不利于代码的维护和扩展。而结构体和指针的使用,让状态机程序架构变得非常清晰。
// 定义一个电机控制状态的结构体
typedef struct {
int state;
float speed;
float torque;
// 其他相关参数
} MotorControlState;
// 状态机函数示例
void MotorControlStateMachine(MotorControlState *state) {
switch (state->state) {
case 0:
// 初始化状态的处理
state->speed = 0;
state->torque = 0;
state->state = 1;
break;
case 1:
// 运行状态的处理
// 调整速度和转矩等参数
break;
default:
break;
}
}通过这样的结构体定义和状态机函数,整个电机控制的逻辑一目了然。而且这种代码架构维护性很强,你可以直接把它粘贴到现有的DSP、ARM等平台的程序框架中,马上就能实现和测试应用,大大节省了开发时间。
总之,这个FOC永磁同步电机矢量控制Simulink全C语言仿真模型,从框架搭建到实际应用的各个方面,都做了精心的设计和优化,为电机控制领域的研究和开发提供了一个不可多得的利器。


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 4
4 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)