永磁同步电机 MTPA 最大转矩电流比控制算法仿真模型探索
永磁同步电机的MTPA最大转矩电流比控制算法的仿真模型,有详细的算法设计文档。 1. 永磁同步电机的数学模型; 2. 永磁同步电机的矢量控制原理; 3. 最大转矩电流比控制; 4. 前馈补偿提高抗负载扰动性能; 5. 弱磁控制; 6. SVPWM调制。
在电机控制领域,永磁同步电机(PMSM)凭借其高效、节能等诸多优点,应用愈发广泛。今天咱们就唠唠 PMSM 的 MTPA 最大转矩电流比控制算法仿真模型,顺便带大家瞅瞅相关算法设计里都藏了啥门道。
永磁同步电机的数学模型
想要控制好 PMSM,得先把它的数学模型搞明白。PMSM 在三相静止坐标系下的电压方程可以写成:
\[
\begin{cases}
u{a}=R{s}i{a}+p\psi{a} \\
u{b}=R{s}i{b}+p\psi{b} \\
u{c}=R{s}i{c}+p\psi{c}
\end{cases}
\]
这里 \( u{a}, u{b}, u{c} \) 是三相绕组电压, \( i{a}, i{b}, i{c} \) 是三相绕组电流, \( R{s} \) 是定子电阻, \( p \) 是微分算子, \( \psi{a}, \psi{b}, \psi{c} \) 是三相绕组磁链。这组方程描述了电压、电流和磁链之间的关系,是后续控制算法设计的根基。简单说,就好比咱们开车得知道车的动力、速度、操控之间的联系,这样才能开好车,控制电机也一样。
永磁同步电机的矢量控制原理
矢量控制那可是 PMSM 控制的关键一招。它的核心思路就是把三相交流电机等效成直流电机来控制。咱们通过坐标变换,把三相静止坐标系下的物理量变换到两相旋转坐标系(dq 坐标系)下。
以电流为例,从三相静止坐标系 \( abc \) 变换到两相静止坐标系 \( \alpha\beta \) 的变换矩阵 \( C_{3s/2s} \) 为:
\[
C_{3s/2s}=\sqrt{\frac{2}{3}}\begin{bmatrix}
1 & -\frac{1}{2} & -\frac{1}{2} \\
永磁同步电机的MTPA最大转矩电流比控制算法的仿真模型,有详细的算法设计文档。 1. 永磁同步电机的数学模型; 2. 永磁同步电机的矢量控制原理; 3. 最大转矩电流比控制; 4. 前馈补偿提高抗负载扰动性能; 5. 弱磁控制; 6. SVPWM调制。
0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2}
\end{bmatrix}
\]
再从两相静止坐标系 \( \alpha\beta \) 变换到两相旋转坐标系 \( dq \) 的变换矩阵 \( C_{2s/2r} \) 为:
\[
C_{2s/2r}=\begin{bmatrix}
\cos\theta & \sin\theta \\
-\sin\theta & \cos\theta
\end{bmatrix}
\]
这里 \( \theta \) 是转子位置角。经过这一系列变换,咱们就可以像控制直流电机一样分别控制励磁电流和转矩电流,实现对电机转矩和转速的精准控制,就像玩游戏,把复杂的操作简化成几个关键按键,按对了就能轻松通关。
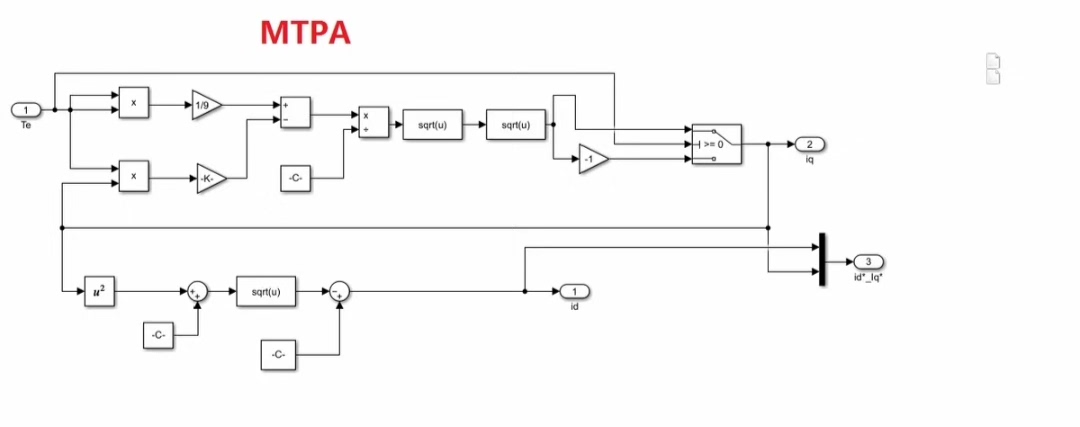
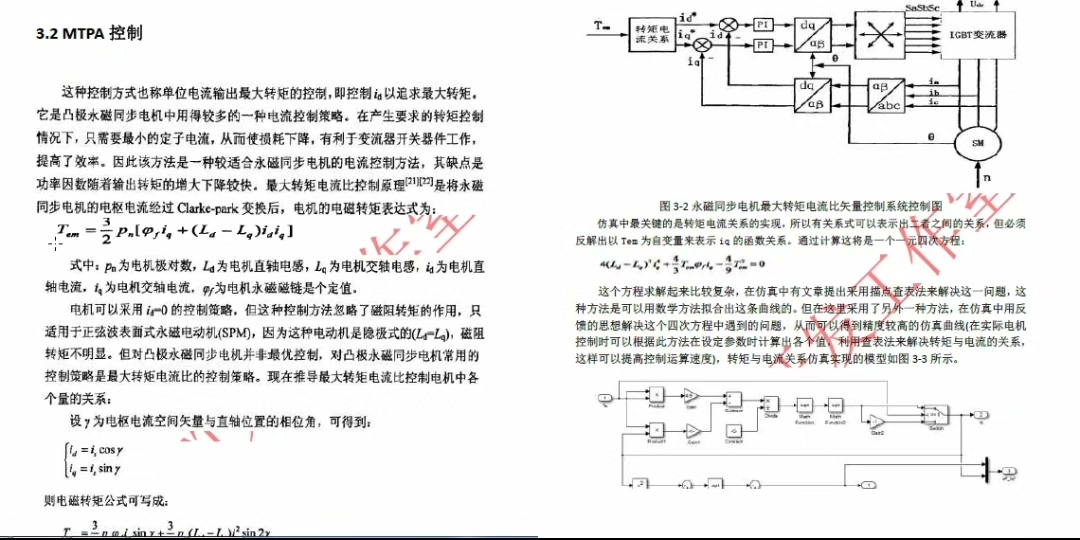
最大转矩电流比控制(MTPA)
MTPA 控制的目标就是在给定电流幅值下,让电机输出最大转矩,提高电机的效率。实现 MTPA 控制,关键在于找到 \( id \) 和 \( iq \) 的最佳关系。一般通过查询预先计算好的 MTPA 曲线表来获取对应关系。代码实现上大概是这样(以 Python 为例):
import numpy as np
# 假设预先计算好的MTPA曲线表
mtpa_table_iq = np.array([0.1, 0.2, 0.3, 0.4, 0.5])
mtpa_table_id = np.array([-0.05, -0.1, -0.15, -0.2, -0.25])
def get_mtpa_id(iq):
# 简单的线性插值查找
for i in range(len(mtpa_table_iq) - 1):
if mtpa_table_iq[i] <= iq < mtpa_table_iq[i + 1]:
slope = (mtpa_table_id[i + 1] - mtpa_table_id[i]) / (mtpa_table_iq[i + 1] - mtpa_table_iq[i])
return mtpa_table_id[i] + slope * (iq - mtpa_table_iq[i])
return None这段代码就是根据输入的 \( iq \) 值,在 MTPA 曲线表中通过线性插值找到对应的 \( id \) 值,给电机控制提供最佳电流组合,就像给电机找到了一条高效运转的“最佳路径”。
前馈补偿提高抗负载扰动性能
实际运行中,负载扰动会影响电机性能。前馈补偿就像是给电机加了个“提前预警”系统。比如在速度环控制中,根据负载转矩的变化提前调整控制量。假设已知负载转矩 \( T{L} \) ,在速度环的输出上加上一个与 \( T{L} \) 相关的前馈补偿量 \( \Delta u \) ,公式大概是这样:
\[ \Delta u = K{ff} T{L} \]
这里 \( K_{ff} \) 是前馈补偿系数。代码里体现就是在速度环输出计算时加入这一项:
# 假设已经获取到负载转矩T_L和前馈补偿系数K_ff
T_L = 0.5
K_ff = 0.1
# 速度环输出计算(简化示意)
speed_ref = 100
speed_feedback = 95
Kp = 0.5
Ki = 0.1
integral = 0
error = speed_ref - speed_feedback
integral += error
u_speed = Kp * error + Ki * integral + K_ff * T_L这样电机面对负载变化就能更稳,好比给车装了个能提前感知路况变化并调整动力的系统,开起来更稳当。
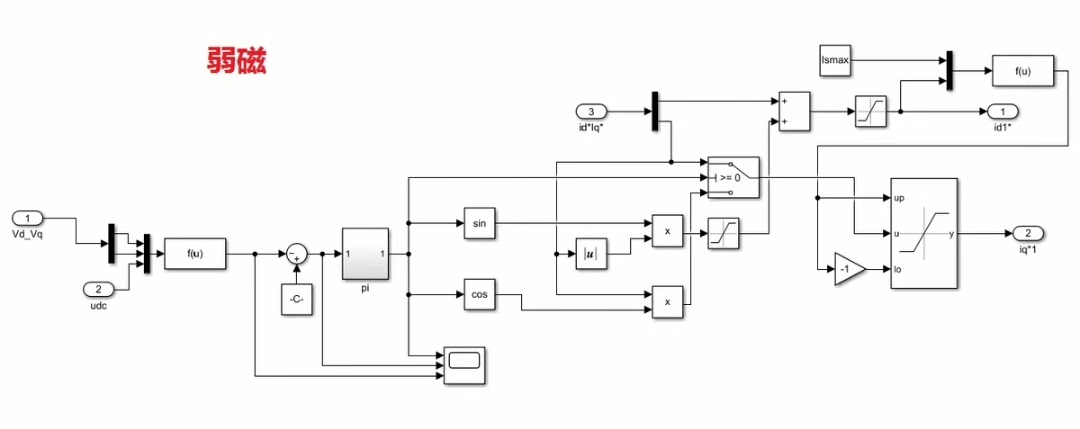
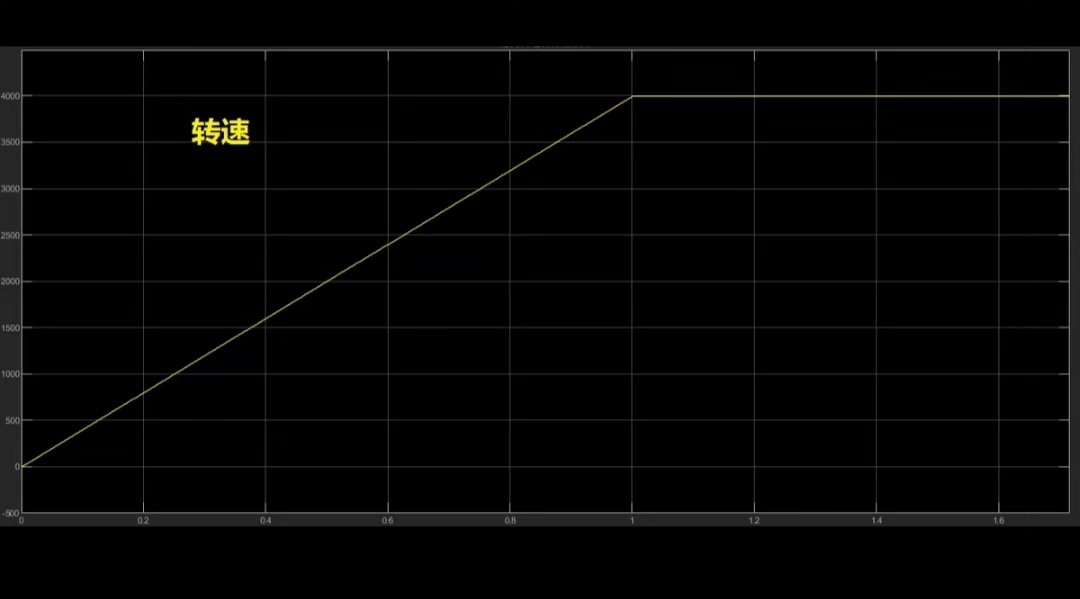
弱磁控制
当电机转速升高到一定程度,为了维持电机的正常运行,就需要弱磁控制。弱磁控制就是通过减小励磁电流 \( i_d \) 来降低电机的磁链,从而使电机能够在更高转速下运行。通常在速度环输出超过一定阈值时,启动弱磁控制逻辑。代码实现可能像这样:
# 假设速度环输出为u_speed,弱磁阈值为weak_magnetic_threshold
weak_magnetic_threshold = 50
if u_speed > weak_magnetic_threshold:
# 进行弱磁控制,减小id
id = id - weak_magnetic_step这就像是给电机“松绑”,让它在高速时也能撒开欢跑。
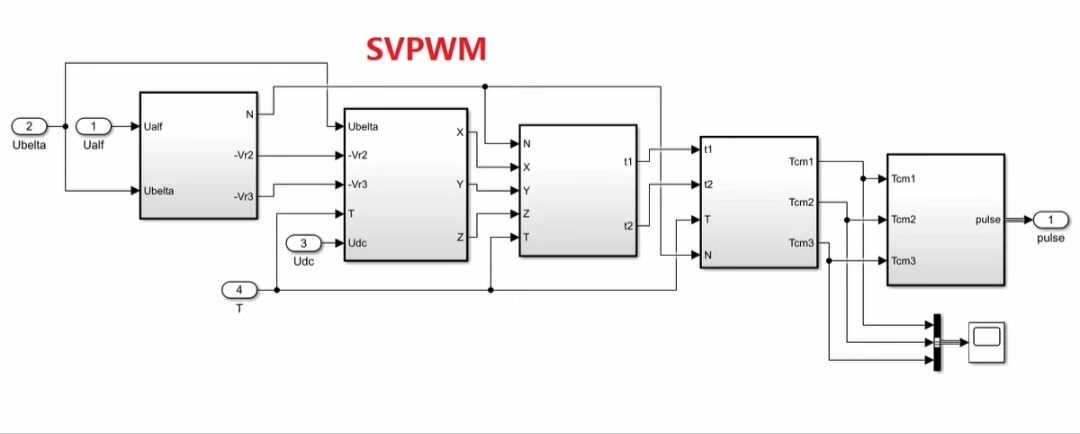
SVPWM 调制
SVPWM(空间矢量脉宽调制)调制是把逆变器的输出电压矢量合成期望的电压矢量,提高直流电压利用率。它的基本原理就是把逆变器的 8 种开关状态组合成不同的空间电压矢量,通过合理分配作用时间来合成期望的电压矢量。下面是一段简单的 SVPWM 实现代码框架(以 C 语言为例):
// SVPWM实现框架
// 假设已经计算出三相电压参考值Urefa, Urefb, Urefc
// 以及直流母线电压Udc
float Urefa, Urefb, Urefc;
float Udc;
// 计算合成电压矢量的幅值和角度
float Uref = sqrt(Urefa * Urefa + Urefb * Urefb + Urefc * Urefc);
float theta = atan2(sqrt(3) * (Urefb - Urefc), 2 * Urefa - Urefb - Urefc);
// 根据幅值和角度确定扇区
int sector = determine_sector(theta);
// 计算各个基本电压矢量的作用时间
float T1, T2, T0;
calculate_time(Uref, sector, &T1, &T2, &T0);
// 根据作用时间生成PWM信号
generate_pwm(T1, T2, T0);这段代码简单展示了 SVPWM 的大致流程,从计算电压矢量到确定扇区,再到计算作用时间并生成 PWM 信号,就像给电机的“动力输出节奏”做了精细编排。
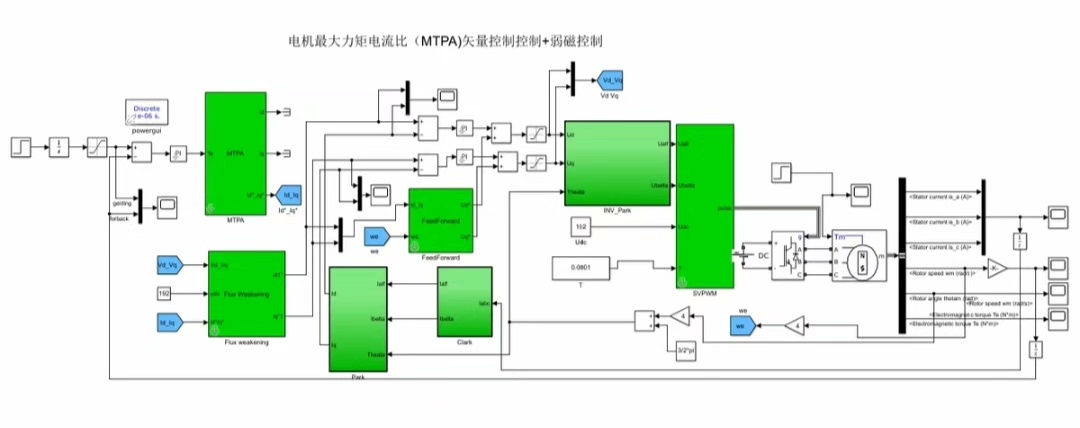
通过上述这些方面,咱们构建起永磁同步电机 MTPA 最大转矩电流比控制算法的仿真模型,从电机的数学模型理解其本质,到各种控制策略和调制方法,每一步都像拼图一样,拼成了高效控制电机的“完整画面”。希望对各位在这个领域探索的朋友有所帮助!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 1
1 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)