探索IMMD混动架构混合动力汽车Cruise仿真模型
IMMD混动架构混合动力汽车Cruise仿真模型(P13构型混合动力整车仿真模型)(串并联式混动构型),Cruise整车仿真模型,混动仿真模型,IMMD混联混动整车仿真模型。 模型介绍: 1.immd架构与THS架构均为最经典的混动架构,基于Cruise平台搭建整车部件等动力学模型,基于MATLAB/Simulink平台完成整车控制策略的建模,策略模型具备纯电模式,增程模式,发动机驱动,再生制动等功能,实现IMMD混联构型车辆全部工作模式,策略严谨正确,附带完整详尽的策略说明文档; 2.采用DLL联合仿真方式,完全采用正向建模思维,仿真模型具备较高精度; 3.可进行循环工况油耗,等速,加速性能,最高车速等动力性经济性计算仿真,cruise模型与Simulink策略不懂随时交流; 4.如需纯Simulink搭建的P2混合动力整车模型与Prius功率分流混合动力整车模型
在混动汽车领域,IMMD混动架构与THS架构堪称经典中的经典。今天咱就来深入聊聊基于Cruise平台搭建的IMMD混动架构混合动力汽车的仿真模型,也就是P13构型混合动力整车仿真模型,它属于串并联式混动构型。
模型搭建与功能实现
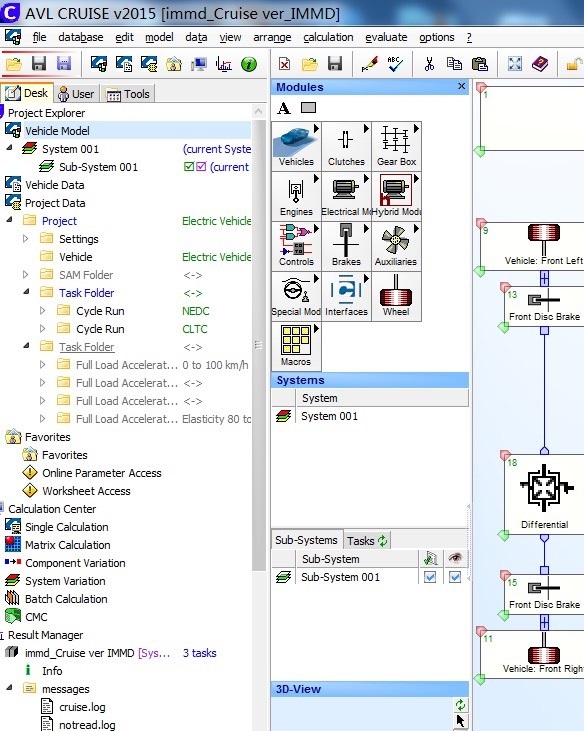
动力学模型搭建
基于Cruise平台,我们完成了整车部件等动力学模型的搭建。这就好比搭建一座高楼,Cruise平台为我们提供了坚实的基础框架,让各个部件能够有机地组合在一起,模拟出真实车辆行驶时的动力学特性。比如说车辆的质量分布、轮胎与地面的摩擦力特性,都能在这个模型中得到体现。
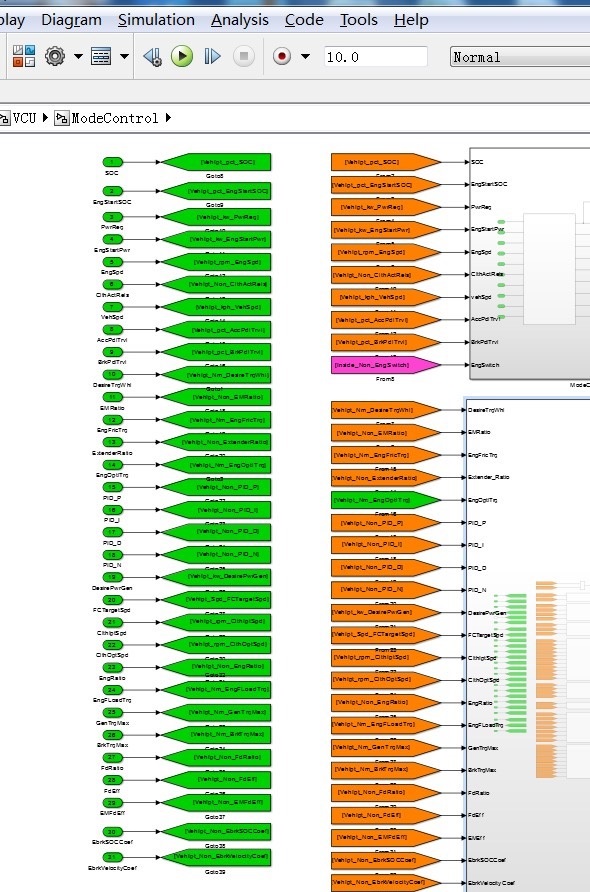
控制策略建模
而整车控制策略的建模则是在MATLAB/Simulink平台上完成的。这可是整个模型的“大脑”,决定了车辆在不同工况下如何运行。它具备多种实用功能,像纯电模式,代码示例如下:
function [motor_power] = pure_electric_mode(state, demand_power)
if state == 'pure_electric'
motor_power = demand_power;
% 这里假设电池能提供足够功率,实际需考虑电池SOC等因素
else
motor_power = 0;
end
end这段代码的逻辑很简单,当车辆处于纯电模式时,电机就输出需求的功率。在实际应用中,我们当然还得考虑电池的电量状态(SOC)等诸多因素,确保电机功率输出的可持续性。
IMMD混动架构混合动力汽车Cruise仿真模型(P13构型混合动力整车仿真模型)(串并联式混动构型),Cruise整车仿真模型,混动仿真模型,IMMD混联混动整车仿真模型。 模型介绍: 1.immd架构与THS架构均为最经典的混动架构,基于Cruise平台搭建整车部件等动力学模型,基于MATLAB/Simulink平台完成整车控制策略的建模,策略模型具备纯电模式,增程模式,发动机驱动,再生制动等功能,实现IMMD混联构型车辆全部工作模式,策略严谨正确,附带完整详尽的策略说明文档; 2.采用DLL联合仿真方式,完全采用正向建模思维,仿真模型具备较高精度; 3.可进行循环工况油耗,等速,加速性能,最高车速等动力性经济性计算仿真,cruise模型与Simulink策略不懂随时交流; 4.如需纯Simulink搭建的P2混合动力整车模型与Prius功率分流混合动力整车模型
增程模式也不可或缺,其核心思路是发动机发电为电池充电,再由电池为电机供电驱动车辆。代码示例:
function [engine_power, motor_power] = range_extender_mode(state, demand_power)
if state == 'range_extender'
engine_power = demand_power + battery_charging_power;
motor_power = demand_power;
else
engine_power = 0;
motor_power = 0;
end
end这里我们假设发动机功率除了满足车辆行驶需求,还得给电池充电。在真实场景里,发动机的发电功率需要根据电池SOC、车辆行驶功率需求等动态调整。
发动机驱动模式和再生制动模式同样重要。发动机驱动模式下,发动机直接提供动力驱动车辆,代码实现大概如下:
function [engine_power] = engine_drive_mode(state, demand_power)
if state == 'engine_drive'
engine_power = demand_power;
else
engine_power = 0;
end
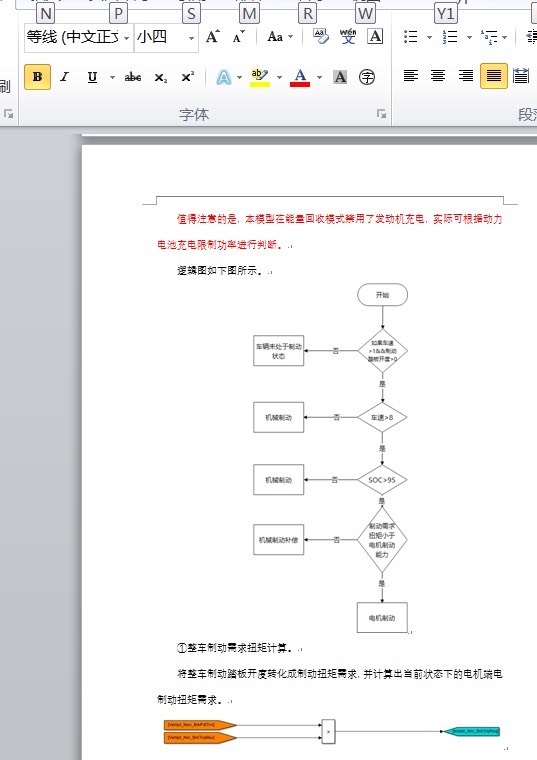
end再生制动模式则是在车辆减速时,将车辆的动能转化为电能储存起来,代码可以这样写:
function [regen_power] = regenerative_braking(state, vehicle_speed)
if state == 'braking' && vehicle_speed > 0
regen_power = braking_force * vehicle_speed;
% 实际需考虑制动系统效率等因素
else
regen_power = 0;
end
end通过这些控制策略,我们成功实现了IMMD混联构型车辆全部工作模式,而且策略严谨正确,还附带完整详尽的策略说明文档,方便大家深入理解和研究。
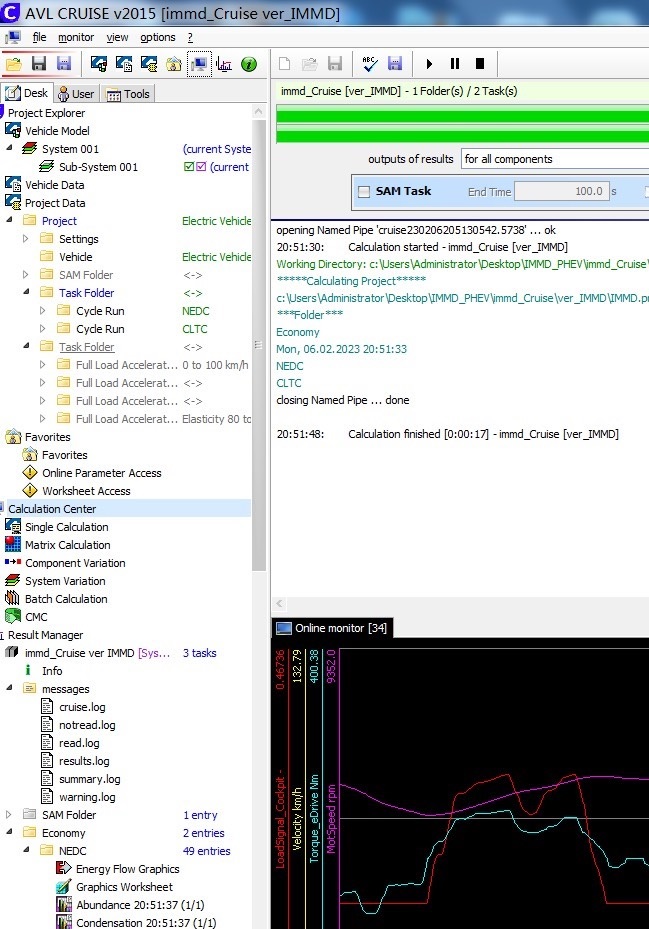
仿真方式与精度
我们采用DLL联合仿真方式,这是一种完全基于正向建模思维的方法。正向建模就像是从一张白纸开始,逐步构建出一个完整的系统,从最底层的物理原理出发,一点点搭建起整个仿真模型。这种方式让我们对模型的每一个细节都有精准的把控,使得仿真模型具备较高精度。无论是车辆在循环工况下的油耗,还是等速、加速性能、最高车速等动力性经济性计算仿真,都能给出较为准确的结果。
交流与拓展
如果在使用cruise模型与Simulink策略过程中有任何不懂的地方,大家都可以随时交流。而且,要是你还需要纯Simulink搭建的P2混合动力整车模型与Prius功率分流混合动力整车模型,这里也能提供相关信息。总之,在混动汽车仿真模型的探索之路上,我们一起前行,不断挖掘更多可能。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 16
16 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)