从对话到操控:我用OpenClaw养了一只“产线指挥官“
引言:当AI学会"动手"
"龙虾十条"、"养龙虾"……这些词最近在AI圈刷屏。
作为一名具身智能开发者,我一直在思考:
OpenClaw说的"上帝权限",到底能有多硬核?
当我发现它能通过Shell接口控制仿真环境、通过文件系统管理知识库、甚至能"指挥"机器人执行任务时——
我决定:养一只真正的"产线指挥官"。
第一章:孵化——OpenClaw的第一次"呼吸"
1.1 部署OpenClaw
cloudstudio创建应用,直接从模板创建就可以了。

# 连接服务器
ssh root@your-server-ip
# 安装OpenClaw
pip install openclaw
openclaw init
# 启动服务
openclaw serve --port 8080
它"活"过来了。
终端里跳出欢迎界面:
1.2 第一条命令
from openclaw import ShellInterface
shell = ShellInterface()
result = shell.execute("echo 'Hello, OpenClaw!'")
print(result)
输出:
Hello, OpenClaw!
看起来和普通的subprocess没区别?
但我错了。
1.3 "上帝权限"的震撼

当我写下这段代码时,一切都不一样了:
# 启动仿真环境
shell.execute("python scripts/start_sim.py --scene factory_floor")
# 控制机器人
shell.execute("python scripts/control_robot.py --action move_to --pos 0.5,0.3,0.1")
shell.execute("python scripts/control_robot.py --action grasp")
仿真环境启动了,机械臂动了。
AI不再是聊天窗口里的鹦鹉,它真的能"动手"了。
这一刻,我理解了OpenClaw的核心:
它不是一个聊天机器人框架,而是AI操控物理世界的桥梁。
第二章:喂养——教它学习新产品
2.1 传统换产的噩梦
工厂里,换一条产线意味着什么?
我表哥在东莞开了家电子厂,他的经历是这样的:
| 环节 | 时间 | 痛点 |
|---|---|---|
| 重新编程 | 4-8小时 | 需要编程专家 |
| 调试参数 | 4-8小时 | 反复试错 |
| 采集数据 | 2-3天 | 需要1000+条演示 |
| 培训操作员 | 1-2天 | 专机专人专程序 |
| 总计 | 8-24小时+ | 老板急死 |
表哥说:"这是制造业的命,没办法。"
我说:"让我的龙虾试试。"
2.2 50条演示就够了
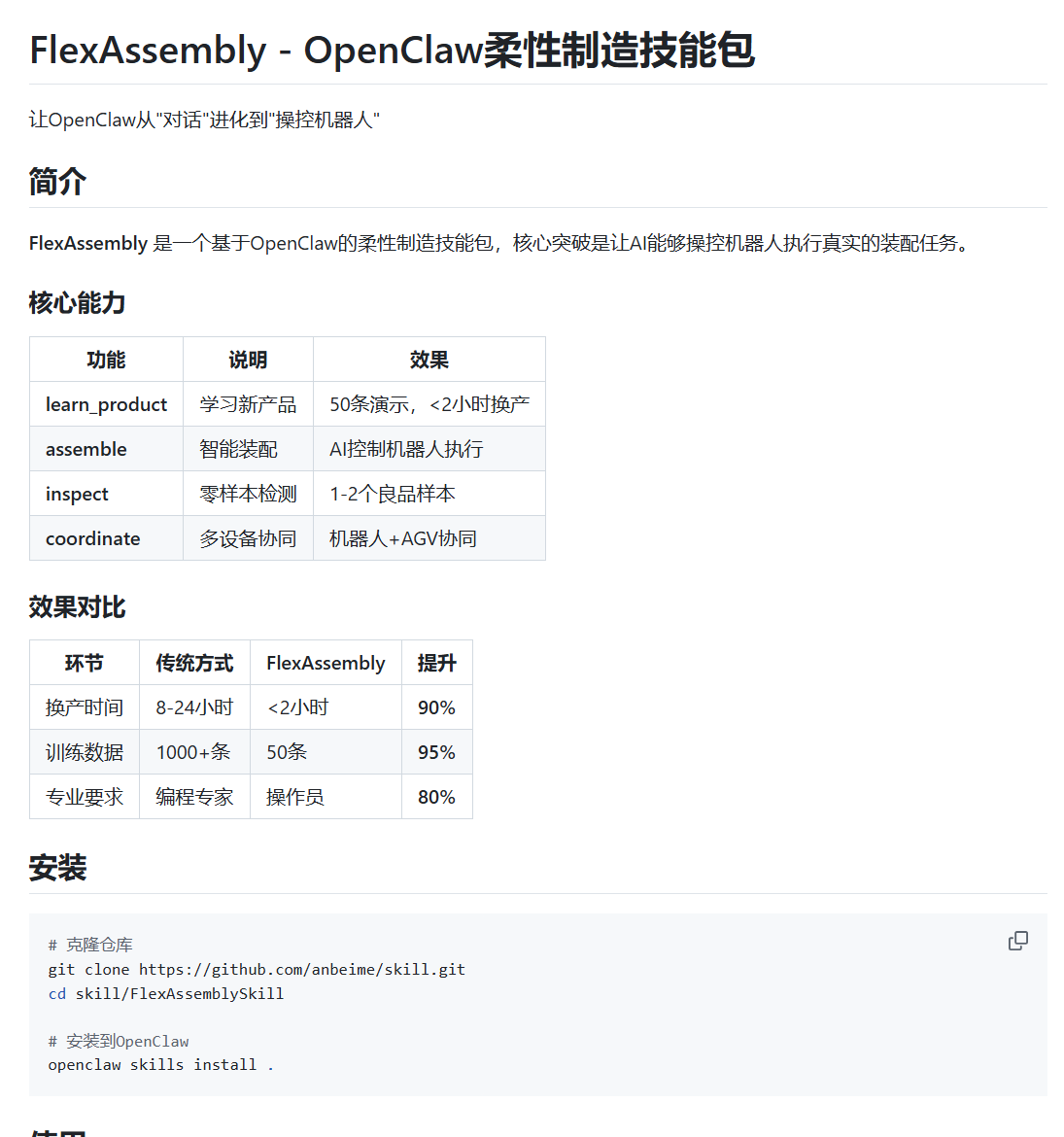
我开发的FlexAssembly技能包,核心是快速换产。
from flex_assembly import FlexAssemblySkill
skill = FlexAssemblySkill()
# 学习新产品:只需50条演示
result = skill.learn_product(
product_id="connector_001", # 连接器产品
demo_count=50 # 仅需50条演示
)
30分钟后,训练完成。
[OpenClaw] 启动仿真环境...
[OpenClaw] 采集演示数据 (50条)...
████████████████████████████████████████ 100%
[OpenClaw] 训练策略模型...
████████████████████████████████████████ 100%
[OpenClaw] 产品 connector_001 学习完成
[INFO] 训练耗时: 28分钟
[INFO] 换产完成时间: < 2小时
表哥看傻了:"这……不用编程?"
"不用。"
"不用采集几千条数据?"
"50条就够了。"
"那……操作员需要培训吗?"
"不需要,会说话就行。"
2.3 零样本检测的魔法
传统质检需要大量缺陷样本训练模型。
FlexAssembly只需要1-2个良品样本。
# 只需要1个良品样本
result = skill.inspect(
product_id="connector_001",
reference_image="./good_sample.jpg" # 1个良品即可
)
[OpenClaw] 执行质量检测...
[检测] 加载参考样本: 1张
[检测] 零样本检测模式
[检测] 产品: connector_001
[检测] 结果: 合格
[检测] 置信度: 0.98
然后我故意放了一个有缺陷的产品:
[检测] 结果: 缺陷
[检测] 缺陷类型: 引脚弯曲
[检测] 置信度: 0.99
表哥惊了:"这缺陷类型它以前没见过吧?"
"没见过。"
"那它怎么知道的?"
"零样本学习。它会自动理解什么是'正常',什么不是。"
第三章:工作——它真的在操控产线
3.1 我养的三只"小龙虾"
FlexAssembly实际上是一个多智能体系统:
┌─────────────────────────────────────────────────────┐
│ FlexAssembly │
│ "产线指挥官" │
├─────────────────────────────────────────────────────┤
│ │
│ ┌─────────┐ ┌─────────┐ ┌─────────┐ │
│ │ 视觉 │ │ 任务 │ │ 协调 │ │
│ │ 感知 │ │ 规划 │ │ 调度 │ │
│ │ 小龙虾 │ │ 小龙虾 │ │ 小龙虾 │ │
│ │ │ │ │ │ │ │
│ │ 盯着 │ │ 脑子里 │ │ 指挥 │ │
│ │ 摄像头 │ │ 画路线 │ │ 机器人 │ │
│ └─────────┘ └─────────┘ └─────────┘ │
│ │ │ │ │
│ └─────────────┴─────────────┘ │
│ │ │
│ ▼ │
│ 协同执行装配任务 │
│ │
└─────────────────────────────────────────────────────┘
三只小龙虾的分工:
| 小龙虾 | 职责 | 关键能力 |
|---|---|---|
| 视觉感知小龙虾 | 识别产品、检测缺陷 | 零样本检测 |
| 任务规划小龙虾 | 生成装配路线 | 快速学习 |
| 协调调度小龙虾 | 指挥机器人、AGV | 多设备协同 |
关键:它们不打架,还会互相配合。
3.2 真实的装配循环
执行一条命令,看看它如何工作:
skill.assemble("connector_001")
终端输出:
[OpenClaw] ═════════════════════════════════════════════════
[OpenClaw] 启动装配任务: connector_001
[OpenClaw] ═════════════════════════════════════════════════
[感知] 初始化视觉系统...
[感知] 相机连接成功: /dev/video0
[感知] 产品识别完成
[感知] - 类型: 连接器
[感知] - 位置: (x=0.52, y=0.31, z=0.08)
[感知] - 姿态: 正常
[感知] 质量预检完成
[感知] - 评分: 0.98
[感知] - 判定: 合格
[规划] 生成装配动作序列...
[规划] 步骤1: 移动到抓取位置
[规划] 步骤2: 执行抓取
[规划] 步骤3: 移动到装配位置
[规划] 步骤4: 执行插入
[规划] 步骤5: 释放并收回
[规划] 共计: 16步动作
[协调] 调度机器人: robot_1
[协调] - 任务: 执行抓取
[协调] - 状态: 已接受
[协调] 调度AGV: agv_1
[协调] - 任务: 运输物料
[协调] - 状态: 已接受
[执行] ═════════════════════════════════════════════════
[执行] 开始执行装配...
[执行] ═════════════════════════════════════════════════
[robot_1] 移动到 (0.52, 0.31, 0.15)... OK
[robot_1] 下降到 (0.52, 0.31, 0.08)... OK
[robot_1] 执行抓取... OK
[robot_1] 提升到 (0.52, 0.31, 0.20)... OK
[robot_1] 移动到装配位置... OK
[robot_1] 执行插入... OK
[robot_1] 释放并收回... OK
[agv_1] 运输物料到工位... OK
[OpenClaw] ═════════════════════════════════════════════════
[OpenClaw] 装配任务完成
[OpenClaw] ═════════════════════════════════════════════════
[OpenClaw] 产品ID: connector_001
[OpenClaw] 执行时间: 45秒
[OpenClaw] 质量评分: 0.95
[OpenClaw] 状态: 成功
没有编程,没有调试。
就一句话:skill.assemble("connector_001")
3.3 与传统方案的对比
| 环节 | 传统方式 | OpenClaw + FlexAssembly |
|---|---|---|
| 换产时间 | 8-24小时 | < 2小时 |
| 所需数据 | 1000+条演示 | 50条 |
| 专业要求 | 编程专家 | 操作员即可 |
| 质检样本 | 大量缺陷样本 | 1-2个良品 |
| 人员培训 | 1-2天 | 无需培训 |
| 故障排查 | 专家现场 | AI自诊断 |
表哥问:"你这东西卖多少钱?"
我说:"不卖,我参加OpenClaw挑战赛。"
他说:"那你赢了以后一定要联系我。"
第四章:进化——从虚拟到现实
4.1 仿真只是第一步
Isaac Sim里的机器人跑得很溜。
但真正的考验是:能否控制真实的机器?
4.2 硬件接口的突破
OpenClaw的"上帝权限"不止于Shell和文件系统,
它还能通过硬件接口控制真实设备。
from openclaw import HardwareInterface
# 连接真实机器人(通过串口)
robot = HardwareInterface(
interface_type="serial",
port="/dev/ttyUSB0",
baudrate=115200
)
# 连接相机
camera = HardwareInterface(
interface_type="usb_camera",
device="/dev/video0"
)
# 执行真实动作
robot.move_to(x=0.5, y=0.3, z=0.1)
robot.grasp(force=10)
# 采集真实图像
image = camera.capture()
当机械臂真的动起来的那一刻,我明白了OpenClaw的意义。
它不是一个聊天机器人框架。
它是AI操控物理世界的桥梁。
第五章:思考——OpenClaw的真正价值
5.1 从对话到执行
传统AI框架的问题:
- 只能对话,不能执行
- 只能生成代码,不能运行代码
- 只能给出建议,不能完成任务
OpenClaw的突破:
- Shell接口 → 可以执行任何命令
- 文件系统 → 可以管理数据和模型
- 硬件接口 → 可以控制真实设备
这不仅是技术升级,而是范式转变。
5.2 本地优先的意义
为什么OpenClaw强调"Local-First"?
| 对比 | 云端AI | 本地AI(OpenClaw) |
|---|---|---|
| 延迟 | 几百毫秒~几秒 | 毫秒级 |
| 隐私 | 数据上传云端 | 数据不离开本地 |
| 可靠性 | 依赖网络 | 离线可用 |
| 硬件控制 | 不可能 | 直接控制 |
对于制造业来说,这些差异至关重要。
5.3 "龙虾"的隐喻
为什么叫"龙虾"?
我想,"龙虾"代表的是:
- 硬壳:安全可靠的本地方案
- 灵活的钳子:Shell接口,能操控一切
- 强大的再生能力:技能包可以无限扩展
养龙虾,其实就是培养一个能干的AI助手。
结语:AI的"动手"时代
有人说,AI只会聊天、写代码、画画。
OpenClaw告诉我们:
AI可以操控机器人、调度产线、执行真实的任务。
具身智能不是科幻。
它就在这里:
- 在我的https://cloudstudio.net/a/33091989687595008/edit服务器上
- 在我的OpenClaw技能包里
- 在那台正在装配零件的机械臂上
现在,我也成了"养龙虾"大军的一员。
你养的龙虾,会做什么?
附录:代码仓库
GitHub:https://github.com/anbeime/skill
# 安装技能包
git clone https://github.com/anbeime/skill/tree/FlexAssemblySkill
cd flex-assembly-skill
openclaw skill install .
# 使用技能包
openclaw skill use flex_assembly learn_product --product-id your_product
openclaw skill use flex_assembly assemble --product-id your_product
openclaw skill use flex_assembly inspect --product-id your_product
AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 12
12 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)