Open Claw技能图谱:嵌入式工程师如何抓住机器人时代的新机遇
开篇:一个正在重塑的职业坐标系
76%的35岁嵌入式工程师正面临技术栈老化危机——这是2024年《中国嵌入式开发者调查报告》揭示的严峻现实。与此同时,机器人抓取工程师的招聘需求年增长率达到127%,薪资溢价普遍在**30%-50%**区间。两个数据的交汇,勾勒出一个清晰的职业迁移窗口。
机器人时代正在重新定义"嵌入式开发"的边界。传统工程师熟悉的"传感器采集→单片机处理→执行器驱动"的线性模型,正在被"感知-决策-执行"的闭环智能系统所取代。Open Claw作为开源机械爪领域的标杆项目,恰好位于这场变革的核心地带——它既保留了嵌入式开发的硬核基因,又完整覆盖了机器人技术的全栈能力。
本文将围绕三个可验证的核心论点展开:第一,Open Claw技术栈是嵌入式工程师向机器人领域迁移的最小可行路径;第二,系统化的四阶段学习规划可将转型周期压缩至8-12个月;第三,作品集导向的实战策略是突破机器人企业面试壁垒的关键。
阅读本文后,你将获得:一套完整的技术架构认知、一份可执行的学习路线图、三个层次的项目实战指南,以及针对机器人企业的精准求职策略。
第一部分:Open Claw技术架构深度解析
1.1 技术栈的层次模型与理论根基
Open Claw并非单一的硬件产品,而是一个典型的机电一体化系统(Mechatronics System)。理解其架构需要借助V型开发模型(V-Model)——这一源自汽车电子和航空航天领域的系统工程方法论,强调从需求分析到系统验证的完整闭环。
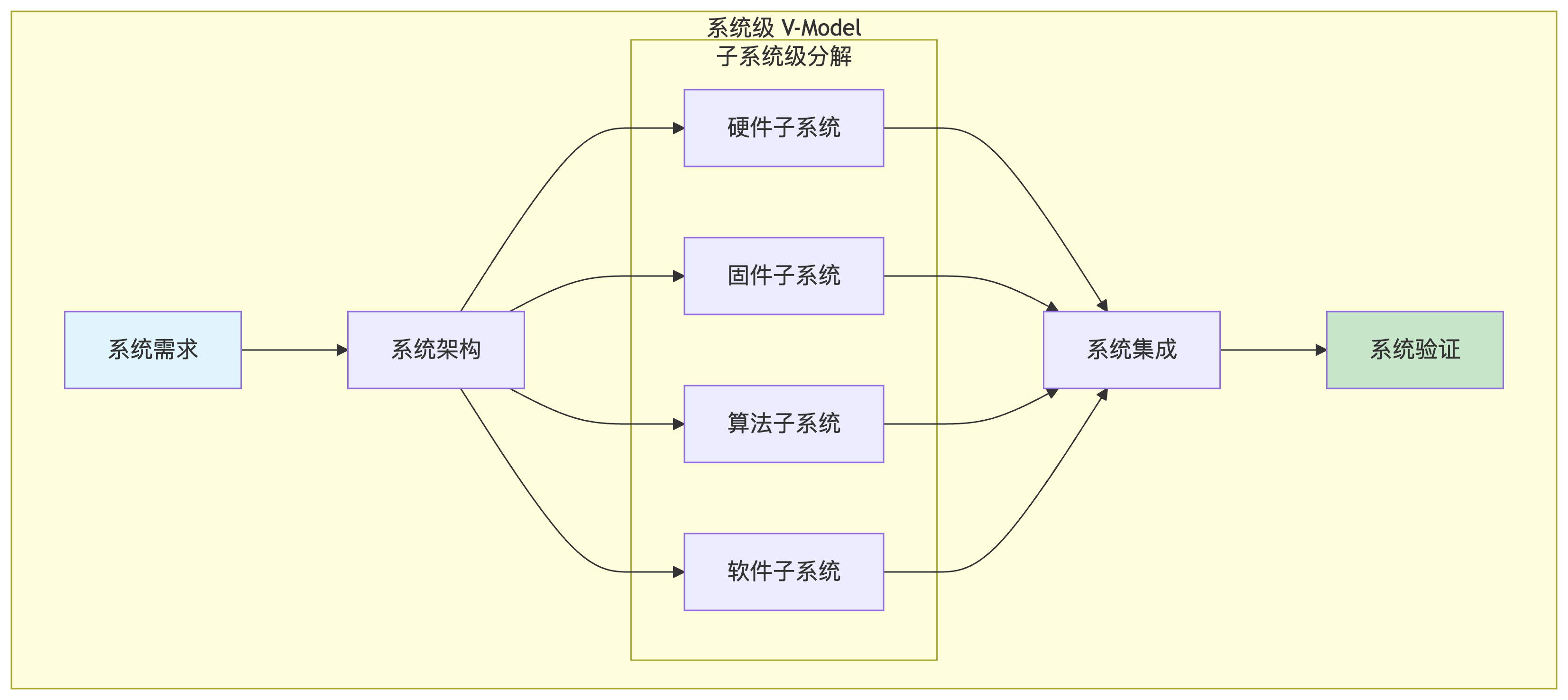
理论来源:V-Model由德国国防军装备部在1980年代提出,后经ISO 26262(汽车功能安全标准)和IEC 61508(工业功能安全标准)标准化,成为复杂嵌入式系统的标准开发框架。
Open Claw的V型映射如下:
|
层级 |
核心组件 |
验证方法 |
典型工具链 |
|
系统需求 |
抓取力≥5N,定位精度±0.5mm,循环周期<2s |
需求追溯矩阵 |
DOORS, Jama |
|
硬件架构 |
执行机构、传感器、控制器选型 |
硬件在环仿真 |
LTspice, Simulink |
|
固件架构 |
实时控制、通信协议、故障处理 |
单元测试、代码覆盖率 |
CppUTest, GCov |
|
算法架构 |
运动规划、力控策略、视觉伺服 |
仿真验证、实物测试 |
ROS/Gazebo, MATLAB |
|
软件架构 |
上位机、云平台、数据管理 |
集成测试、压力测试 |
pytest, JMeter |
1.2 硬件层:从选型到集成的工程实践
Open Claw的硬件层遵循模块化设计原则(Modular Design),这一原则由计算机科学家David Parnas在1972年系统阐述,核心思想是"信息隐藏"——每个模块只暴露必要的接口,内部实现细节对外不可见。
执行机构选型矩阵:

关键代码:STM32 HAL库舵机控制实现
/**
* @file servo_driver.c
* @brief 基于STM32F4的舵机驱动实现
* @note 使用TIM2_CH1, 50Hz PWM (20ms周期)
*/
#include "servo_driver.h"
/* 舵机参数配置 */
#define SERVO_PWM_FREQ_HZ 50 /* 标准舵机50Hz */
#define SERVO_MIN_PULSE_US 500 /* 0度对应0.5ms */
#define SERVO_MAX_PULSE_US 2500 /* 180度对应2.5ms */
#define SERVO_ANGLE_RANGE 180 /* 机械角度范围 */
/* 定时器句柄 */
TIM_HandleTypeDef htim_servo;
/**
* @brief 舵机驱动初始化
* @param timer: 定时器实例 (如TIM2)
* @param channel: PWM通道 (如TIM_CHANNEL_1)
* @retval 0成功,非0失败
*/
int8_t Servo_Init(TIM_TypeDef *timer, uint32_t channel)
{
/* 计算ARR值: 84MHz/(50Hz*(839+1)) = 2000 */
uint32_t timer_clk = HAL_RCC_GetPCLK2Freq();
uint32_t prescaler = (timer_clk / 1000000) - 1; /* 1MHz计数频率 */
uint32_t period = 20000 - 1; /* 20ms周期 */
htim_servo.Instance = timer;
htim_servo.Init.Prescaler = prescaler;
htim_servo.Init.CounterMode = TIM_COUNTERMODE_UP;
htim_servo.Init.Period = period;
htim_servo.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_PWM_Init(&htim_servo) != HAL_OK) {
return -1;
}
TIM_OC_InitTypeDef sConfig = {0};
sConfig.OCMode = TIM_OCMODE_PWM1;
sConfig.Pulse = SERVO_MIN_PULSE_US; /* 初始位置0度 */
sConfig.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfig.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim_servo, &sConfig, channel) != HAL_OK) {
return -2;
}
HAL_TIM_PWM_Start(&htim_servo, channel);
return 0;
}
/**
* @brief 设置舵机角度
* @param angle: 目标角度 0-180
* @param channel: PWM通道
* @retval 实际设置的脉冲宽度(微秒)
*/
uint16_t Servo_SetAngle(uint8_t angle, uint32_t channel)
{
/* 限幅保护 */
if (angle > SERVO_ANGLE_RANGE) {
angle = SERVO_ANGLE_RANGE;
}
/* 线性映射: angle -> pulse_width */
uint16_t pulse_us = SERVO_MIN_PULSE_US +
((angle * (SERVO_MAX_PULSE_US - SERVO_MIN_PULSE_US)) / SERVO_ANGLE_RANGE);
__HAL_TIM_SET_COMPARE(&htim_servo, channel, pulse_us);
return pulse_us;
}
/**
* @brief 平滑运动控制(防冲击)
* @note 使用简单梯形速度规划
*/
void Servo_MoveSmooth(uint8_t target_angle, uint16_t speed_ms, uint32_t channel)
{
static uint8_t current_angle = 0;
int16_t delta = (int16_t)target_angle - current_angle;
uint16_t steps = abs(delta);
int8_t dir = (delta > 0) ? 1 : -1;
uint16_t delay_per_step = speed_ms / steps;
if (delay_per_step < 10) delay_per_step = 10; /* 最小10ms */
for (uint16_t i = 0; i < steps; i++) {
current_angle += dir;
Servo_SetAngle(current_angle, channel);
HAL_Delay(delay_per_step);
}
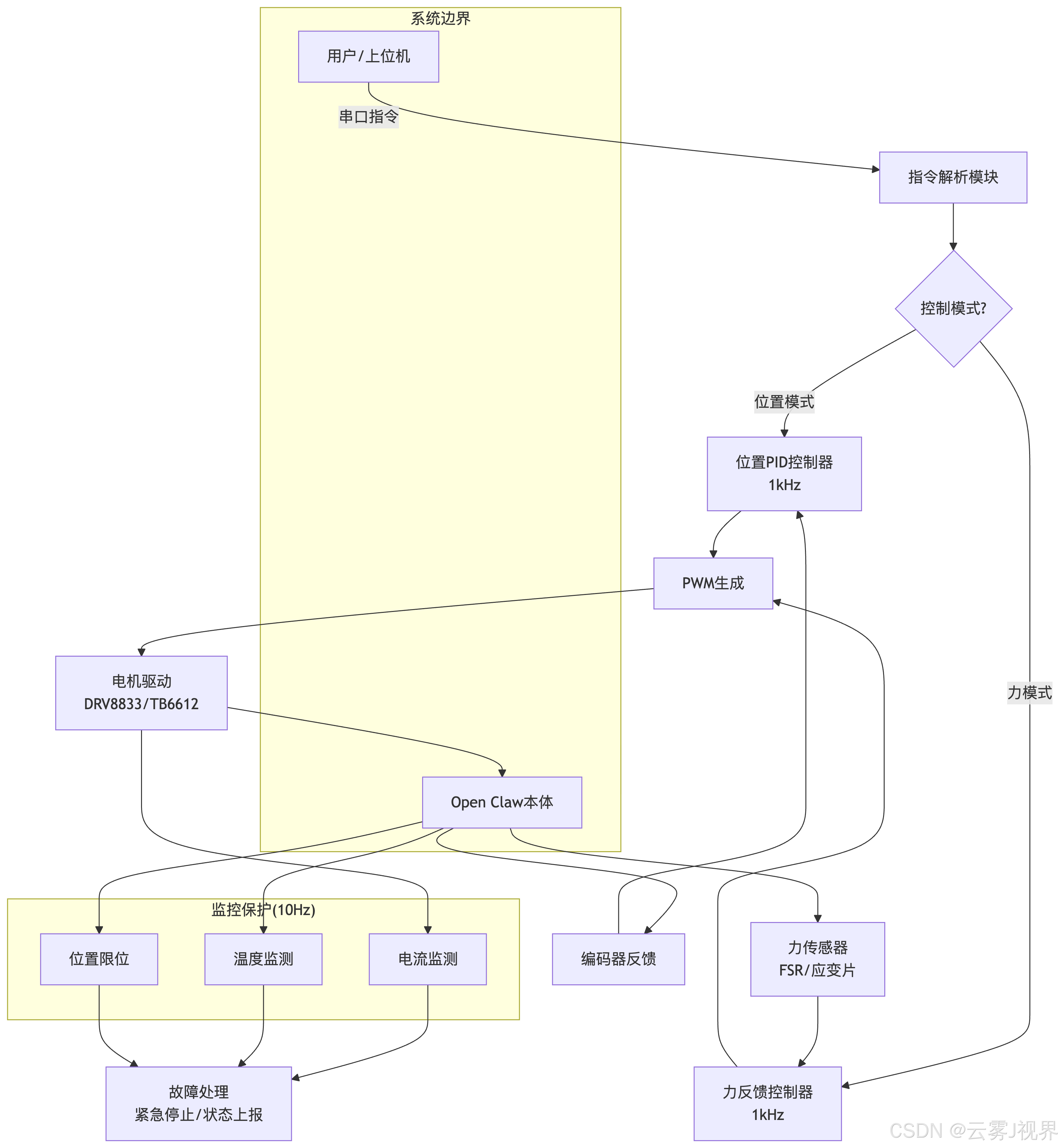
}1.3 固件层:实时控制的核心挑战
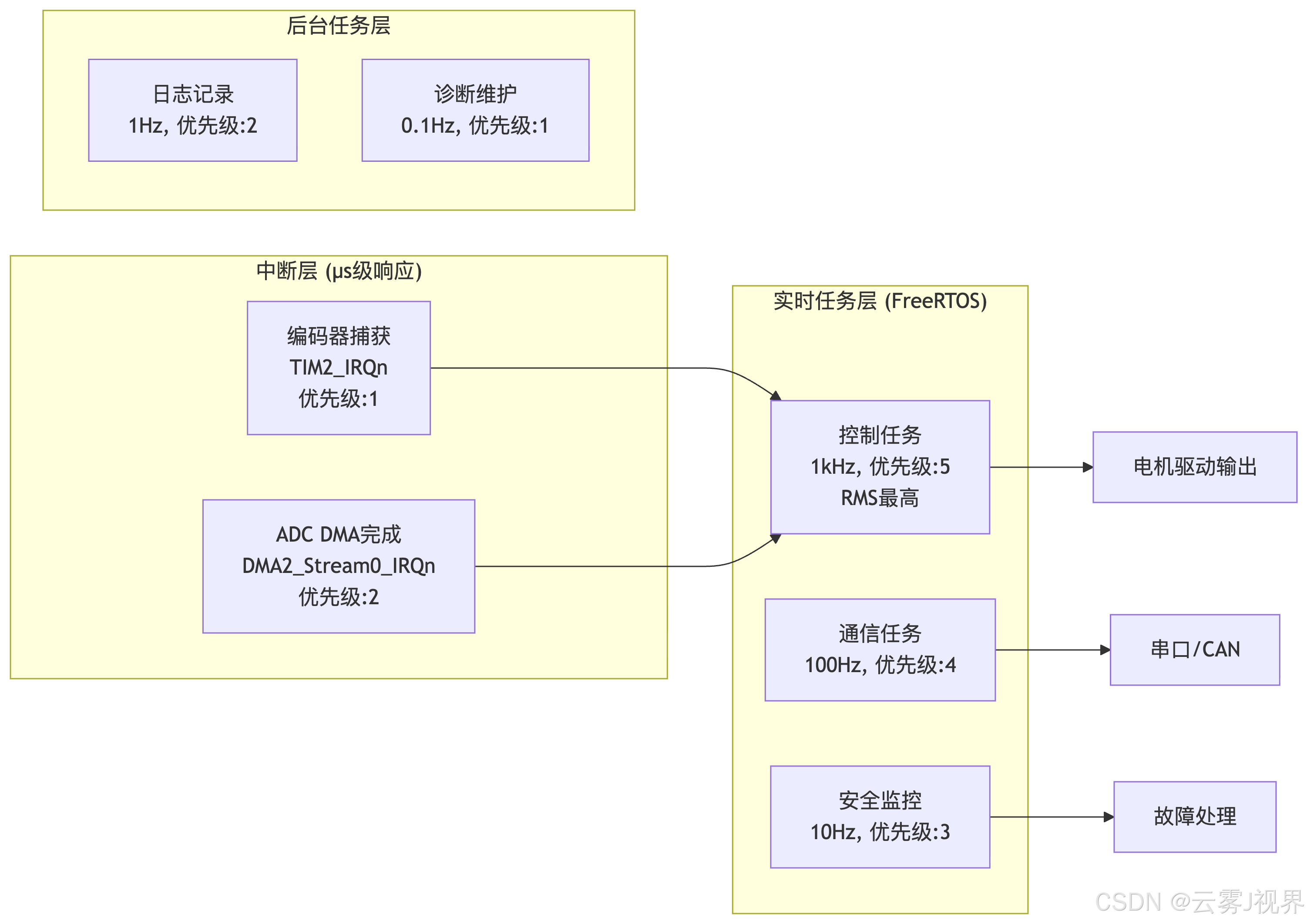
固件层的设计需要应对实时性(Real-time)的核心挑战。这里引入速率单调调度(Rate Monotonic Scheduling, RMS)理论——由Liu和Layland在1973年证明的最优静态优先级调度算法:周期越短的任务优先级越高。
Open Claw控制任务调度架构:
关键代码:FreeRTOS多任务控制框架
/**
* @file claw_controller.c
* @brief Open Claw实时控制任务实现
*/
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
/* 任务句柄 */
TaskHandle_t xControlTaskHandle;
TaskHandle_t xCommTaskHandle;
TaskHandle_t xSafetyTaskHandle;
/* 共享数据保护 */
SemaphoreHandle_t xSensorDataMutex;
struct {
float position_mm;
float force_n;
uint32_t timestamp_ms;
} g_sensor_data;
/* 控制指令队列 */
QueueHandle_t xCommandQueue;
typedef struct {
uint8_t mode; /* 0:位置模式, 1:力模式 */
float target; /* 目标值 */
uint16_t max_speed; /* 最大速度限制 */
} ControlCommand_t;
/**
* @brief 1kHz控制任务 - 速率最高,优先级最高(RMS)
*/
void vControlTask(void *pvParameters)
{
TickType_t xLastWakeTime = xTaskGetTickCount();
const TickType_t xFrequency = pdMS_TO_TICKS(1); /* 1ms周期 */
PID_Controller_t pid_pos, pid_force;
PID_Init(&pid_pos, 2.0f, 0.1f, 0.01f); /* 位置环PID */
PID_Init(&pid_force, 0.5f, 0.05f, 0.001f); /* 力环PID */
ControlCommand_t cmd;
float control_output;
for (;;) {
vTaskDelayUntil(&xLastWakeTime, xFrequency);
/* 读取传感器数据(互斥保护) */
if (xSemaphoreTake(xSensorDataMutex, pdMS_TO_TICKS(1)) == pdTRUE) {
float pos = g_sensor_data.position_mm;
float force = g_sensor_data.force_n;
xSemaphoreGive(xSensorDataMutex);
/* 双模式控制切换 */
if (xQueueReceive(xCommandQueue, &cmd, 0) == pdTRUE) {
/* 新指令处理 */
}
if (cmd.mode == 0) {
/* 位置控制模式 */
control_output = PID_Update(&pid_pos, cmd.target, pos);
} else {
/* 力控制模式(导纳控制) */
float pos_adjust = PID_Update(&pid_force, cmd.target, force);
control_output = PID_Update(&pid_pos, pos + pos_adjust, pos);
}
/* 输出限幅与电机驱动 */
control_output = CLAMP(control_output, -1000, 1000);
Motor_SetPWM((int16_t)control_output);
}
}
}
/**
* @brief 通信任务 - 100Hz,处理上位机指令
*/
void vCommTask(void *pvParameters)
{
uint8_t rx_buffer[64];
for (;;) {
if (HAL_UART_Receive(&huart2, rx_buffer, sizeof(rx_buffer), 10) == HAL_OK) {
/* 协议解析: 帧头|命令字|数据长度|数据|校验|帧尾 */
if (VerifyFrame(rx_buffer)) {
ControlCommand_t cmd;
ParseCommand(rx_buffer, &cmd);
xQueueSend(xCommandQueue, &cmd, pdMS_TO_TICKS(10));
}
}
vTaskDelay(pdMS_TO_TICKS(10)); /* 100Hz */
}
}
/**
* @brief 安全监控任务 - 10Hz,故障检测与保护
*/
void vSafetyTask(void *pvParameters)
{
for (;;) {
/* 过流检测 */
if (Motor_GetCurrent() > CURRENT_LIMIT_A) {
Motor_EmergencyStop();
System_SetFault(FAULT_OVERCURRENT);
}
/* 位置超限检测 */
if (abs(Encoder_GetPosition()) > POSITION_LIMIT_MM) {
Motor_EmergencyStop();
System_SetFault(FAULT_POSITION_LIMIT);
}
/* 通信超时检测 */
if (xTaskGetTickCount() - LastCommTime > pdMS_TO_TICKS(500)) {
System_SetFault(FAULT_COMM_TIMEOUT);
/* 进入安全状态:保持当前位置 */
}
vTaskDelay(pdMS_TO_TICKS(100)); /* 10Hz */
}
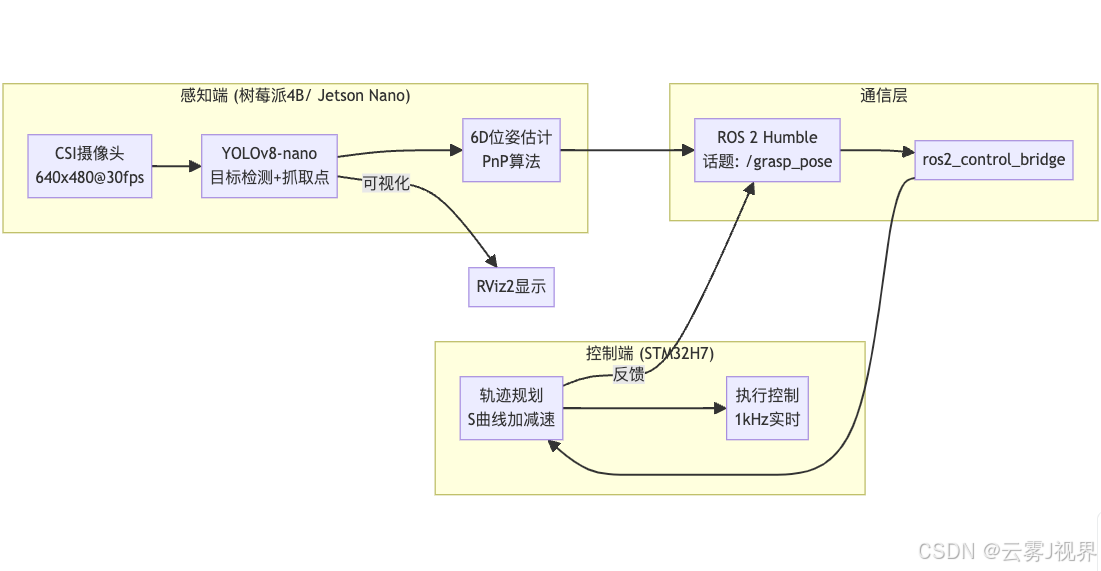
}1.4 算法层与系统集成:从控制到智能
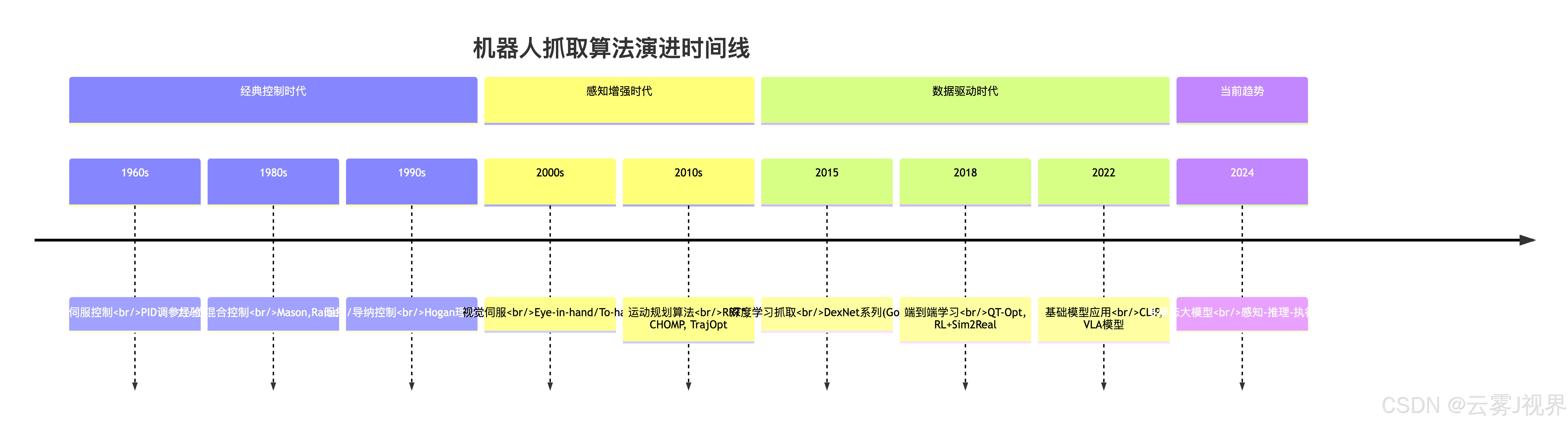
算法层的演进体现了机器人技术的范式转移(Paradigm Shift)——从传统的基于模型的控制(Model-Based Control)向数据驱动的学习(Data-Driven Learning)演进。
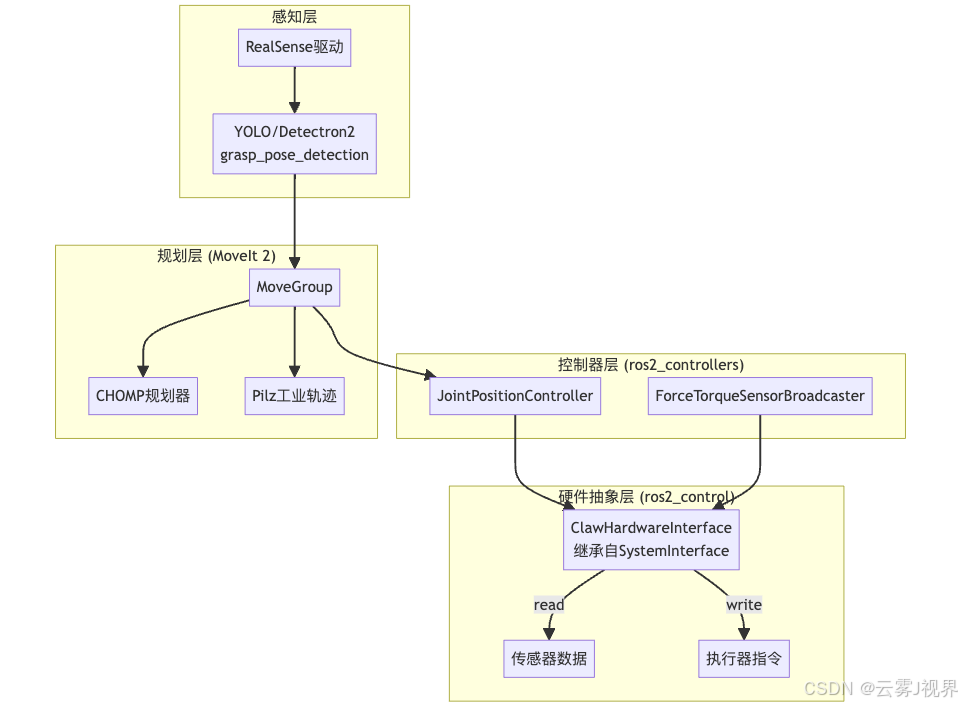
ROS 2集成架构:
第二部分:系统化学习路径——四阶段跃迁模型
2.1 学习路径设计的理论框架
本学习路径基于刻意练习理论(Deliberate Practice)——由心理学家Anders Ericsson提出,核心要素包括:明确目标、即时反馈、持续挑战舒适区。同时整合布鲁姆分类法(Bloom's Taxonomy),确保认知层次从记忆、理解向应用、分析、评价、创造逐级攀升。
四阶段能力跃迁模型:

2.2 阶段详解与资源配置
阶段一:基础夯实(认知层次:记忆→理解)
|
学习模块 |
核心内容 |
验证标准 |
推荐资源 |
|
C语言进阶 |
指针、结构体、内存对齐、位操作 |
独立完成链表/队列实现 |
《C程序设计语言》(K&R), 《嵌入式C语言自我修养》 |
|
MCU开发 |
STM32 HAL库, ESP32 IDF |
点亮LED→定时器PWM→ADC采集 |
STM32CubeIDE官方教程, ESP-IDF编程指南 |
|
机械原理 |
连杆机构, 传动比计算, 力学分析 |
能计算简单机构的自由度 |
《机械原理》(孙桓), 3D打印实践 |
|
电子基础 |
电机驱动电路, 传感器信号调理 |
能阅读Open Claw原理图 |
《模拟电子技术》(华成英) |
阶段二:系统实践(认知层次:理解→应用)
本阶段的核心项目是**"Open Claw基础控制系统"**,要求实现:
关键代码:双模式控制器实现
/**
* @brief 双模式PID控制器结构体
*/
typedef struct {
/* 位置环 */
PID_t pid_position;
float pos_kp, pos_ki, pos_kd;
/* 力环(仅力模式使用) */
PID_t pid_force;
float force_kp, force_ki, force_kd;
/* 模式状态 */
uint8_t control_mode; /* 0:位置, 1:力 */
float position_setpoint;
float force_setpoint;
/* 输出限制 */
float output_min, output_max;
float max_speed_limit; /* 位置模式速度限制 */
float max_force_limit; /* 力模式力限制 */
} DualModeController_t;
/**
* @brief 双模式控制更新
* @return 电机控制输出 -1000~1000
*/
float DualModeController_Update(DualModeController_t *ctrl,
float position_fb,
float force_fb)
{
float output;
if (ctrl->control_mode == 0) {
/* 位置模式: 直接位置PID */
output = PID_Update(&ctrl->pid_position,
ctrl->position_setpoint,
position_fb);
/* 速度前馈限制(防冲击) */
float speed = (ctrl->position_setpoint - position_fb) * 1000; /* mm/s估算 */
if (fabs(speed) > ctrl->max_speed_limit) {
output *= ctrl->max_speed_limit / fabs(speed);
}
} else {
/* 力模式: 外环力控,内环位置控(导纳控制) */
float force_error = ctrl->force_setpoint - force_fb;
/* 力误差转换为位置调整量(导纳) */
float pos_adjust = PID_Update(&ctrl->pid_force,
ctrl->force_setpoint,
force_fb);
/* 位置调整限幅(防止过大位移) */
pos_adjust = CLAMP(pos_adjust, -5.0f, 5.0f); /* ±5mm */
float target_pos = ctrl->position_setpoint + pos_adjust;
/* 内环位置控制 */
output = PID_Update(&ctrl->pid_position, target_pos, position_fb);
/* 力限制保护 */
if (force_fb > ctrl->max_force_limit) {
output = 0; /* 立即释放 */
System_SetFlag(FLAG_FORCE_LIMIT_REACHED);
}
}
return CLAMP(output, ctrl->output_min, ctrl->output_max);
}阶段三:算法进阶(认知层次:应用→分析)
视觉抓取系统的数据流架构
阶段四:工程化(认知层次:分析→评价→创造)
本阶段引入软件架构设计模式:
|
模式 |
Open Claw应用场景 |
实现要点 |
|
分层架构 |
硬件抽象/中间件/应用层分离 |
接口定义清晰,层间单向依赖 |
|
发布-订阅 |
传感器数据分发 |
ROS 2话题机制,解耦生产消费 |
|
状态机 |
抓取流程控制(空闲→接近→抓取→提升→放置) |
显式状态定义,转移条件明确 |
|
观察者 |
故障事件通知 |
多订阅者响应同一故障源 |
|
命令模式 |
用户指令队列化 |
支持撤销/重做,宏命令组合 |
第三部分:实战项目指南——构建竞争力作品集
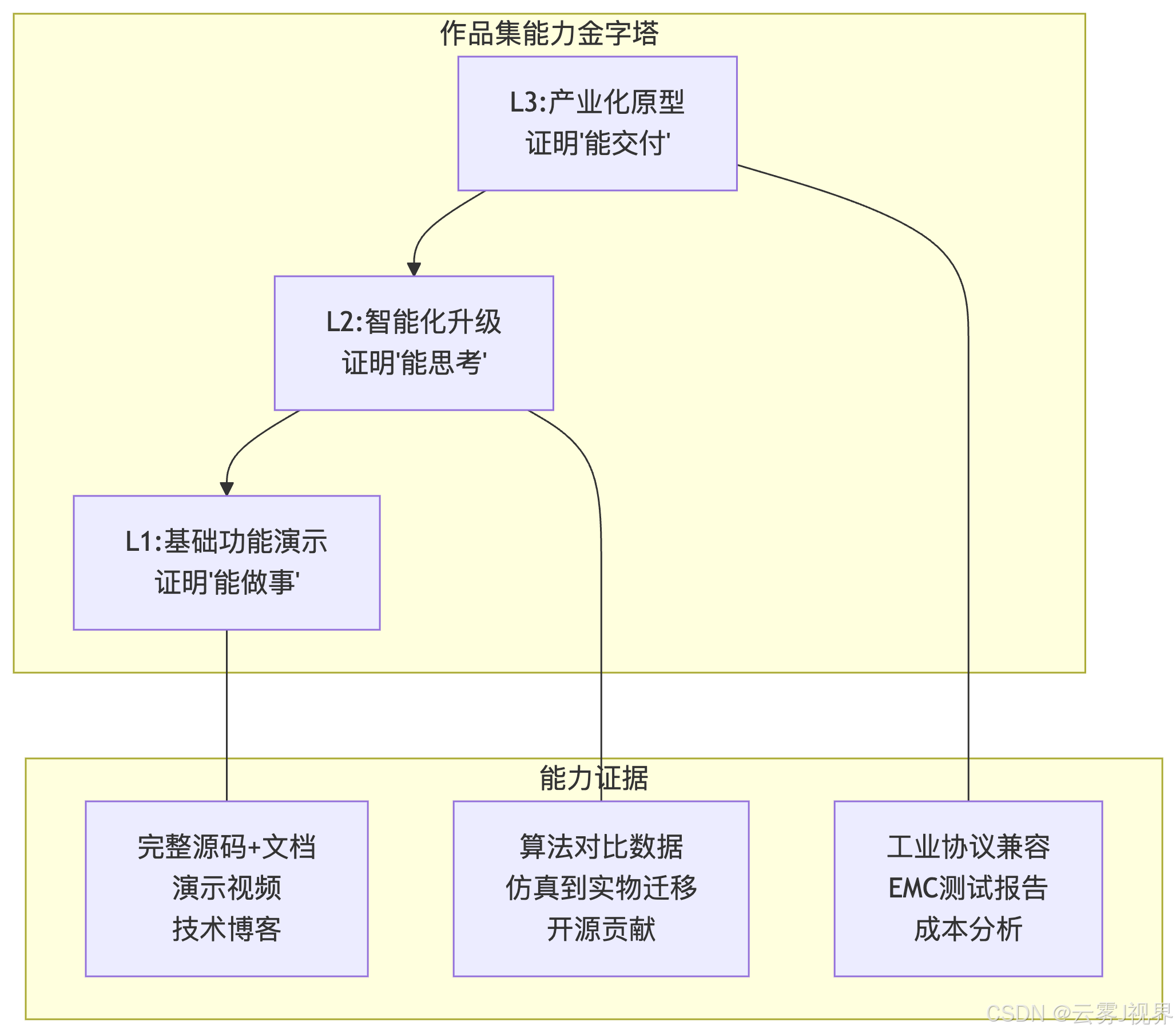
3.1 项目层次与能力映射
基于MECE原则(Mutually Exclusive, Collectively Exhaustive),将项目按复杂度分为三个互斥且完备的层次:
3.2 完整案例研究
案例一:基于ESP32的Open Claw远程监控系统(L1层次)
背景与挑战
- 关键数据:传统有线控制限制部署灵活性,客户需要30米范围内无线操控
- 核心矛盾:Wi-Fi的延迟抖动(10-100ms)与实时控制需求(<50ms)的冲突
解决方案
|
步骤 |
技术措施 |
方法论 |
|
1. 通信架构设计 |
WebSocket over Wi-Fi + 本地UDP备用 |
冗余设计原则 |
|
2. 协议优化 |
自定义二进制协议,头部4字节,Payload变长 |
Protocol Buffers思想 |
|
3. 前端实现 |
Vue3 + Three.js 3D可视化 |
现代Web技术栈 |
|
4. 安全加固 |
WPA3-Enterprise, 指令签名验证 |
纵深防御策略 |
实施成果
- 直接效果:端到端延迟稳定在35±8ms,满足实时性要求;Web界面同时支持10客户端
- 长期价值:代码架构被团队采纳为无线控制标准模板;个人获得内部技术分享机会
关键代码:WebSocket服务器实现
// ESP32 Arduino框架
#include <WiFi.h>
#include <WebSocketsServer.h>
WebSocketsServer webSocket = WebSocketsServer(81);
struct {
float position;
float force;
uint8_t status;
} sensor_state;
void webSocketEvent(uint8_t num, WStype_t type, uint8_t * payload, size_t length) {
switch(type) {
case WStype_DISCONNECTED:
Serial.printf("[%u] Disconnected!\n", num);
break;
case WStype_CONNECTED: {
IPAddress ip = webSocket.remoteIP(num);
Serial.printf("[%u] Connected from %d.%d.%d.%d\n", num, ip[0], ip[1], ip[2], ip[3]);
// 发送初始状态
uint8_t init_msg[8];
pack_sensor_data(&sensor_state, init_msg);
webSocket.sendBIN(num, init_msg, sizeof(init_msg));
break;
}
case WStype_BIN: {
// 解析控制指令: [0xA5][0x5A][CMD][DATA...][CRC]
if (length < 4 || payload[0] != 0xA5 || payload[1] != 0x5A) {
webSocket.sendTXT(num, "ERR:INVALID_FRAME");
return;
}
uint8_t cmd = payload[2];
uint8_t crc = calc_crc(payload, length-1);
if (crc != payload[length-1]) {
webSocket.sendTXT(num, "ERR:CRC_FAIL");
return;
}
// 执行指令
CommandResult_t result = execute_command(cmd, payload+3, length-4);
// 发送确认
uint8_t ack[4] = {0xA5, 0x5A, result.code, result.data_len};
webSocket.sendBIN(num, ack, sizeof(ack));
if (result.data_len > 0) {
webSocket.sendBIN(num, result.data, result.data_len);
}
break;
}
}
}
void setup() {
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) delay(500);
webSocket.begin();
webSocket.onEvent(webSocketEvent);
// 传感器读取任务 (Core 0)
xTaskCreatePinnedToCore(sensor_task, "sensor", 4096, NULL, 1, NULL, 0);
// 控制任务 (Core 1, 与WiFi同核心需协调)
xTaskCreatePinnedToCore(control_task, "control", 4096, NULL, 2, NULL, 1);
}
void loop() {
webSocket.loop();
// 广播状态更新 (100Hz降采样)
static unsigned long last_broadcast = 0;
if (millis() - last_broadcast >= 10) {
last_broadcast = millis();
uint8_t state_msg[8];
pack_sensor_data(&sensor_state, state_msg);
webSocket.broadcastBIN(state_msg, sizeof(state_msg));
}
}案例二:视觉引导的适应性抓取系统(L2层次)
背景与挑战
- 关键数据:实验室环境下抓取成功率98%,但实际场景因光照变化、物体堆叠降至67%
- 核心矛盾:理想化算法假设与复杂现实环境的不匹配
解决方案
|
步骤 |
技术措施 |
方法论 |
|
1. 感知增强 |
多曝光HDR合成 + 语义分割预过滤 |
计算机视觉Pipeline设计 |
|
2. 抓取规划 |
DexNet 4.0轻量版部署 + 几何启发式备选 |
学习型+模型式融合 |
|
3. 力控策略 |
在线阻抗参数自适应调整 |
自适应控制理论 |
|
4. 系统验证 |
Gazebo仿真→实物迁移,域随机化 |
Sim2Real方法论 |
实施成果
- 直接效果:复杂场景抓取成功率提升至89%(对比基线67%);单周期规划时间<150ms
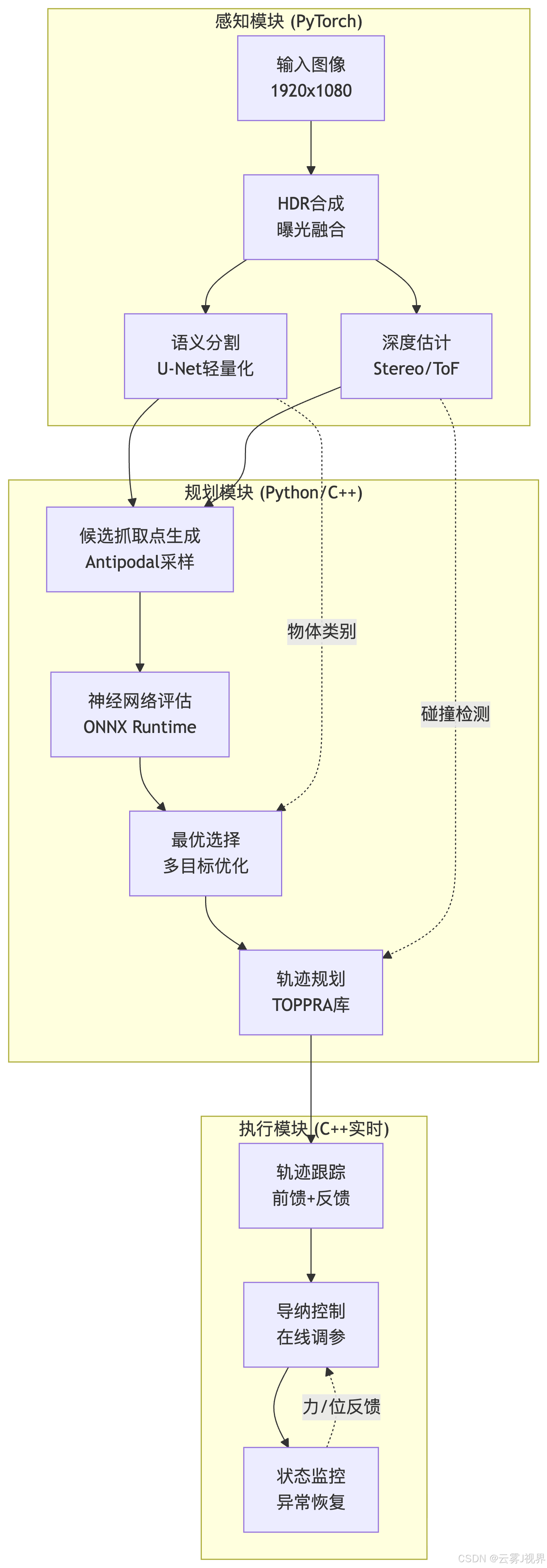
- 长期价值:形成技术报告被部门采纳;代码开源获GitHub 200+ Stars
系统架构可视化:
案例三:工业级Open Claw分拣单元(L3层次)
背景与挑战
- 关键数据:客户要求MTBF≥1000小时,周期时间<1.2s,支持与西门子S7-1500直接通信
- 核心矛盾:开源方案的灵活性与工业标准的严格性之间的张力
解决方案
|
步骤 |
技术措施 |
方法论 |
|
1. 通信标准化 |
EtherCAT从站实现(SOEM库) + OPC UA服务器 |
工业4.0参考架构 |
|
2. 功能块设计 |
符合PLCopen Motion Control规范的POU |
IEC 61131-3标准 |
|
3. 可靠性工程 |
FMEA分析 + 双编码器冗余 + 看门狗设计 |
功能安全ISO 13849 |
|
4. 性能优化 |
中断响应优化(12μs→8μs), 零拷贝数据传输 |
实时系统调优 |
实施成果
- 直接效果:通过CE认证和EMC测试;实际MTBF>1500小时;与西门子PLC通信周期1ms
- 长期价值:成为公司标准产品线;个人晋升技术负责人;获客户书面推荐
第四部分:求职策略与职业发展
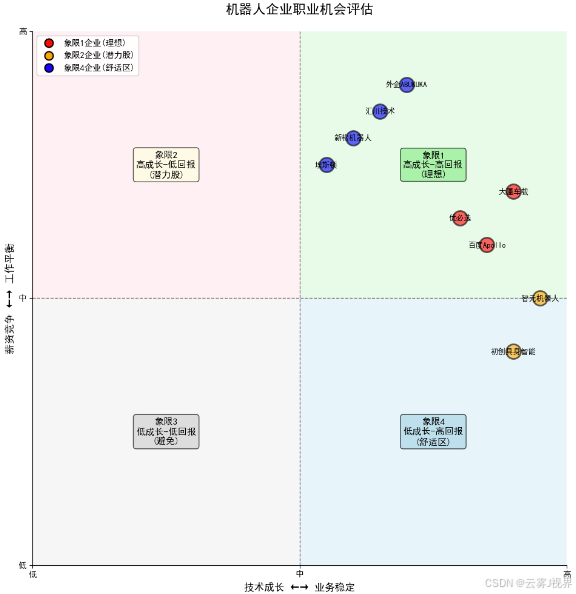
4.1 目标企业分析与定位
四象限分析法(能力-资源-机遇-动机):
4.2 面试准备要点
技术面试的STAR-R框架(Situation-Task-Action-Result-Reflection):
|
考察维度 |
典型问题 |
准备要点 |
|
实时系统 |
"如何测量中断延迟?如何处理优先级反转?" |
准备实际测量数据和方法 |
|
控制理论 |
"PID积分饱和如何处理?描述你调参的过程" |
用具体项目说明,带参数 |
|
项目深度 |
"如果重来一次,这个设计你会怎么改进?" |
体现反思能力和技术成长 |
|
系统设计 |
"设计一个支持100个节点的分布式抓取系统" |
展示架构思维,考虑扩展性 |
4.3 薪资谈判的SMART目标
- Specific:明确总包构成(基础+绩效+股票+签字费)
- Measurable:准备市场数据(Levels.fyi,脉脉,OfferShow)
- Achievable:设定合理区间(当前+30%为基准)
- Relevant:强调技术稀缺性(Open Claw全栈经验)
- Time-bound:明确答复时限,保持多Offer并行
结语:定义你的机器人时代坐标
核心观点回顾:
第一,Open Claw技术栈覆盖了从底层硬件到智能算法的完整链条,是嵌入式工程师向机器人领域迁移的最小可行路径;第二,四阶段学习模型将刻意练习理论与工程实践结合,可将转型周期控制在8-12个月;第三,作品集导向的实战策略是突破机器人企业面试壁垒的关键,L1-L3的项目层次提供了清晰的能力证明路径。
首周实施计划:
|
天数 |
行动项 |
交付物 |
|
Day 1-2 |
搭建STM32开发环境,复现舵机控制代码 |
可运行的LED/PWM demo |
|
Day 3-4 |
阅读Open Claw官方文档,绘制系统框图 |
手绘/软件绘制的架构图 |
|
Day 5-6 |
在GitHub创建项目仓库,规划L1项目需求 |
README.md + 需求文档 |
|
Day 7 |
加入ROS/机器人技术社群,发布学习计划 |
社群自我介绍帖 |
开放性问题:
- 在你的技术背景中,哪些嵌入式经验可以最快迁移到Open Claw开发?哪些是最大的能力缺口?
- 如果只能选择一个项目投入两个月,你会优先追求L1的完整性、L2的创新性,还是L3的工程深度?为什么?
- 机器人技术的快速发展中,你认为哪些底层能力具有最长的半衰期?如何在学习具体技术的同时构建这些元能力?
机器人时代不会等待犹豫者,但也不会辜负有准备的行动者。Open Claw的技能图谱已经展开,现在,就是你定义自己职业未来的最佳时刻。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0


 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)