探索 MPC_ACC_2020-master:四旋翼飞机的智能模型预测跟踪控制
MPC_ACC_2020-master 具有设定点收敛保证的四旋翼飞机的模型预测跟踪控制器 matlab
在飞行器控制领域,四旋翼飞机的精准控制一直是个热门话题。今天咱们就来聊聊“MPCACC2020-master”,这个具有设定点收敛保证的四旋翼飞机的模型预测跟踪控制器,并且是基于 Matlab 实现的哦。
四旋翼飞机控制难点与模型预测控制优势
四旋翼飞机作为一种高度非线性、强耦合的系统,想要实现精准稳定的飞行控制可不容易。传统控制方法在应对复杂动态环境时,常常显得力不从心。而模型预测控制(MPC)则脱颖而出,它能够基于系统的模型预测未来状态,并根据预测结果在线优化控制输入,以达到跟踪设定点的目的。MPCACC2020-master 就是将这种强大的控制策略应用到四旋翼飞机上,实现可靠的设定点收敛。
Matlab 代码示例与解析
咱们直接来看关键代码片段,以下是简化后的模型预测控制核心代码部分(基于 Matlab):
% 定义系统参数
A = [1 dt 0 0; 0 1 0 0; 0 0 1 dt; 0 0 0 1]; % 状态转移矩阵
B = [0.5*dt^2; dt; 0.5*dt^2; dt]; % 控制输入矩阵
Q = [10 0 0 0; 0 10 0 0; 0 0 1 0; 0 0 0 1]; % 状态权重矩阵
R = 1; % 控制输入权重矩阵
% 初始化状态和预测时域
x = [0; 0; 0; 0]; % 初始状态
N = 10; % 预测时域
for k = 1:num_time_steps
% 构建预测模型
X = zeros(4, N+1);
U = zeros(1, N);
X(:,1) = x;
for i = 1:N
X(:,i+1) = A*X(:,i) + B*U(i);
end
% 构建成本函数
cost = 0;
for i = 1:N
cost = cost + (X(:,i+1)'*Q*X(:,i+1)) + (U(i)'*R*U(i));
end
% 应用优化求解器
options = optimoptions('quadprog','Display','off');
[U_opt, fval] = quadprog(2*[R*ones(1,N); zeros(4*N,N)], zeros(4*N+N,1), [], [], [], [], [], [], [], options);
U_opt = U_opt(1:N);
% 应用最优控制输入
u = U_opt(1);
x = A*x + B*u;
% 模拟四旋翼飞机状态更新
% 这里省略实际四旋翼飞机动力学模型更新部分,实际应用需替换
end代码分析
- 系统参数定义:首先定义了
A状态转移矩阵和B控制输入矩阵,它们描述了四旋翼飞机离散化后的动态模型。Q和R矩阵分别用于调整状态和控制输入在成本函数中的权重。这几个矩阵的数值选取非常关键,直接影响到控制器的性能。例如,增大Q矩阵对角线上某些元素的值,可以让控制器更关注对应的状态变量,使其更快收敛到设定值。 - 初始化部分:设定了初始状态
x和预测时域N。预测时域决定了控制器向前预测多远的未来状态,一般来说,N越大,对未来的预测越准确,但计算量也会随之增大。 - 预测模型构建:通过循环,基于状态转移矩阵
A和控制输入矩阵B,预测未来N步的状态X。这个过程就像是在模拟四旋翼飞机在不同控制输入下的未来飞行轨迹。 - 成本函数构建:成本函数
cost综合考虑了未来状态与目标状态的偏差(通过Q矩阵加权)以及控制输入的大小(通过R矩阵加权)。控制器的目标就是最小化这个成本函数,以找到最优的控制输入序列。 - 优化求解:使用 Matlab 的
quadprog函数来求解二次规划问题,找到最优的控制输入序列U_opt。options参数用于设置求解器的一些选项,这里我们关闭了显示,以减少不必要的输出。 - 应用控制输入与状态更新:选取最优控制输入序列的第一个值
u应用到系统中,更新四旋翼飞机的状态x。实际应用中,还需要根据四旋翼飞机的具体动力学模型来更新状态,但这里为了简化,省略了这部分复杂代码。
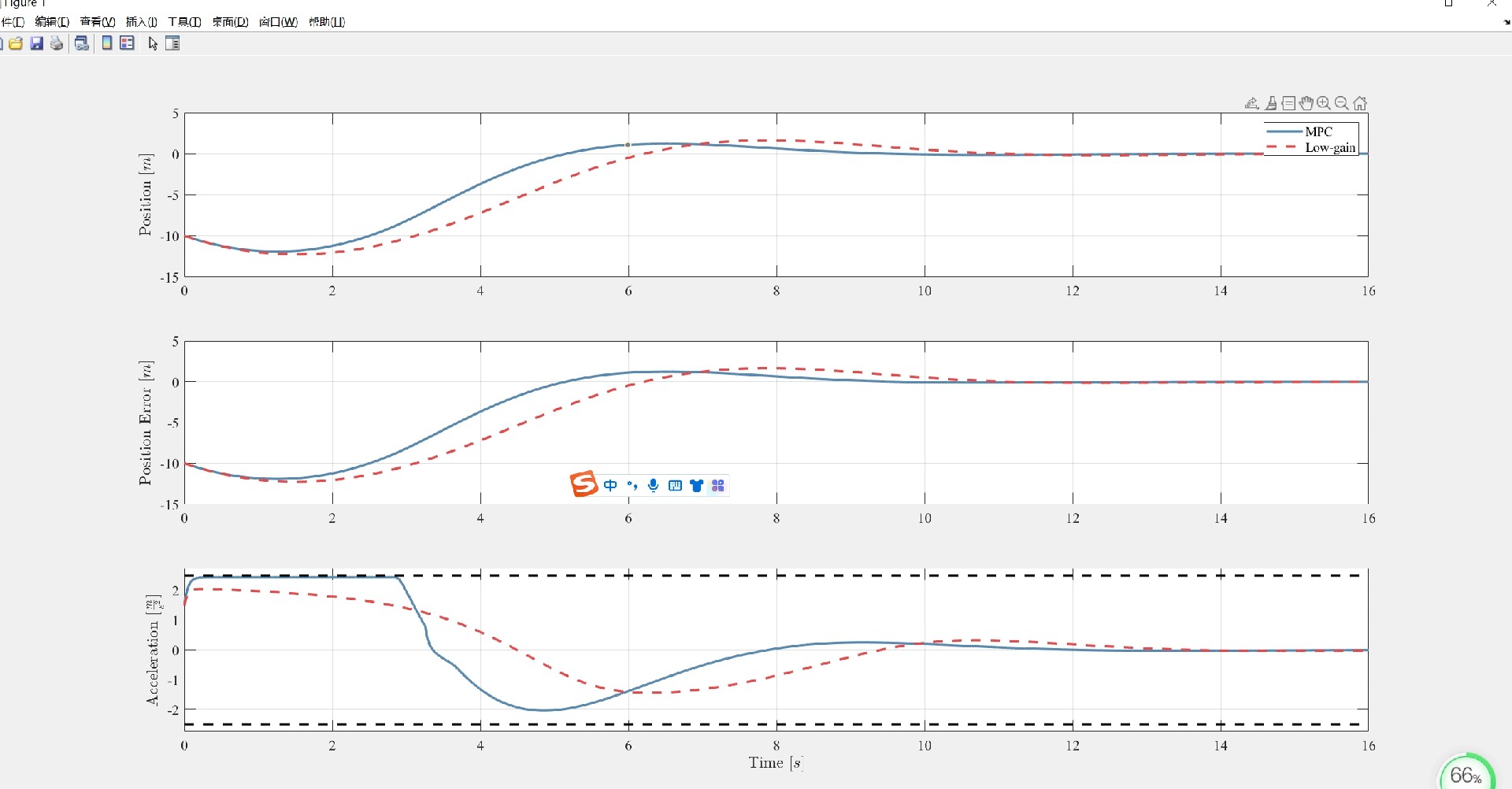
MPC_ACC_2020-master 的设定点收敛保证
MPCACC2020-master 通过精心设计的成本函数和优化算法,能够保证四旋翼飞机的状态收敛到设定点。其核心在于,每次优化求解得到的控制输入序列都是基于当前状态和未来预测状态计算的,并且不断滚动优化。随着时间推进,控制器会持续调整控制输入,使四旋翼飞机逐步靠近并稳定在设定点。这种基于模型预测和在线优化的机制,为四旋翼飞机在复杂环境下实现精准跟踪提供了有力保障。
MPC_ACC_2020-master 具有设定点收敛保证的四旋翼飞机的模型预测跟踪控制器 matlab
总之,MPCACC2020-master 基于 Matlab 的模型预测跟踪控制器为四旋翼飞机控制提供了一种高效且可靠的解决方案。通过深入理解其代码原理和控制策略,我们可以进一步优化和扩展,让四旋翼飞机在更多领域发挥更大作用。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)