基于Matlab的直流电机模糊自适应PID控制仿真研究:出报告+程序+PPT现成文件
基于matlab的直流电机模糊自适应pid控制仿真研究 出报告+程序+ppt 现成文件
基于MATLAB的直流电机模糊自适应PID控制仿真,是一个挺有意思的研究方向。最近正好在准备一个相关的报告,所以决定写一篇博文,把我的思考过程和一些实现细节分享一下。
项目背景
直流电机控制在工业自动化中应用广泛,而PID控制作为经典的控制算法,一直占据着重要地位。不过,传统的PID控制在面对系统参数变化或者外部干扰时,表现可能会不尽如人意。于是,模糊控制和自适应PID控制的概念被引入,以提高系统的鲁棒性和适应性。
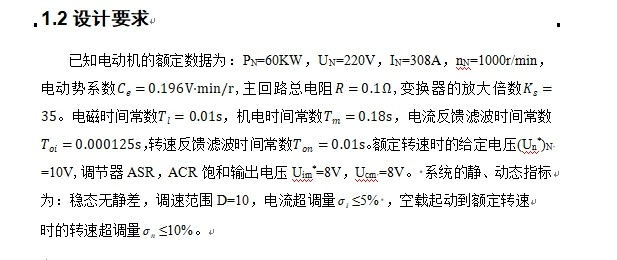
这次的研究,主要利用MATLAB进行仿真实验,目标是设计一种模糊自适应PID控制器,用于直流电机的速度控制。
所需材料
先整理一下需要用到的资源和工具:
- MATLAB软件(最好是R2021a或更高版本)
- 直流电机的数学模型(包括传递函数或状态空间方程)
- 模糊逻辑工具箱(Fuzzy Logic Toolbox)
- PID控制器设计工具箱(Control System Toolbox)
现成的文件包括:
- MATLAB仿真模型文件(.mdl或.slx)
- 代码脚本(.m文件)
- 汇报PPT
- 中英文报告模板
如果你需要,可以私信我,我可以分享一些代码和资源哦。
模糊自适应PID控制简介
模糊自适应PID控制的基本思想是利用模糊逻辑来调整PID控制器的参数(Kp、Ki、Kd)。这样,控制器可以根据系统的实时状态,动态地调整参数,从而提高控制性能。
模糊控制的基本结构
- 输入模糊化:将系统的误差(e)和误差变化率(de)转化为模糊语言变量(如“正大”、“负小”等)。
- 模糊规则库:根据控制经验,定义模糊控制规则(如“如果误差大且误差变化率正,那么比例增益增加”)。
- 模糊推理:根据输入和规则库,推理出PID参数的调整量。
- 清晰化:将模糊结果转换为实际的Kp、Ki、Kd值。
PID控制器模型
PID控制器的传递函数可以表示为:
\[
G(s) = Kp + \frac{Ki}{s} + K_d s
\]
在MATLAB中,可以很容易地通过pid函数来实现这个模型。
仿真实验
接下来,介绍一下仿真的主要步骤。
第一步:建立直流电机模型
直流电机的传递函数可以表示为:
基于matlab的直流电机模糊自适应pid控制仿真研究 出报告+程序+ppt 现成文件
\[
G(s) = \frac{K}{s + a}
\]
其中,K是电机的增益,a是时间常数。在MATLAB中,可以使用tf函数来创建传递函数模型。
% 创建直流电机的传递函数模型
K = 10; % 增益
a = 0.1; % 时间常数
G = tf(K, [a 1]); % 转速传递函数第二步:搭建模糊自适应PID控制器
模糊控制器的搭建可以使用MATLAB的Fuzzy Logic Toolbox。这里简单介绍一下模糊推理系统(FIS)的搭建。
- 定义输入变量(误差e和误差变化率de),以及输出变量(PID参数调整量)。
- 定义模糊集合,比如“负大”、“负中”、“零”、“正中”、“正大”等。
- 编写模糊规则。例如:
如果e是正大,且de是正大,那么Kp增加,Ki增加,Kd增加。
如果e是负大,且de是负大,那么Kp减少,Ki减少,Kd减少。
在MATLAB中,可以使用fuzzy函数来创建和编辑模糊推理系统。
第三步:闭环控制系统的仿真
将模糊自适应PID控制器与直流电机模型连接起来,进行闭环仿真。
% 闭环仿真
sys = feedback(G * C, 1); % C是模糊自适应PID控制器
t = 0:0.01:10; % 时间向量
[y, t, x] = lsim(sys, u, t); % u是输入信号,这里是阶跃信号通过调整模糊规则和PID参数,可以观察系统的阶跃响应曲线,并评估控制效果。
结果分析
在仿真过程中,我发现模糊自适应PID控制相比传统PID控制,能够更快地响应系统的参数变化。尤其是在面对外部扰动时,系统的超调量和调节时间都有明显的改善。
不过,也有一些需要改进的地方。例如,模糊规则的设计依赖于控制经验,如何更系统地优化这些规则,可能还需要进一步的研究。
报告与PPT
为了完成这次研究,我还制作了一份报告和PPT,里面包含以下内容:
- 研究背景与意义
- 模糊自适应PID控制的原理
- MATLAB仿真模型与实现
- 仿真结果与分析
- 结论与展望
PPT的设计也比较简洁,重点突出仿真结果和对比分析。
总结
这次基于MATLAB的直流电机模糊自适应PID控制仿真研究,让我对模糊控制和自适应控制有了更深的理解。虽然过程中遇到了一些问题,比如模糊规则的优化和仿真参数的调试,但最终还是得出了满意的结果。
如果你对这个方向感兴趣,可以尝试自己动手搭建一个简单的仿真模型,相信会有不一样的收获!如果有问题或者需要帮助,可以随时联系我哦。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)