基于现代Web技术栈的ROS2可视化系统项目分享
0. 摘要
本文将深入分析一个创新的ROS2 Web可视化系统——RVIZ-RQT-VISUAL项目的技术架构与实现细节。该系统通过现代化的Web技术栈,成功将传统桌面端RViz和RQT工具的核心功能迁移到浏览器环境,实现了跨平台、易部署、高性能的机器人可视化解决方案。项目采用Vue.js 3作为前端框架,结合Three.js进行三维渲染,后端使用FastAPI与ROS2 rclpy构建桥接服务,通过WebSocket实现实时双向通信。本文将从系统架构、技术实现、核心算法、性能优化等多个维度,全面剖析这一技术方案的设计理念与工程实践。代码后续会开
源:[https://github.com/lovelyyoshino/
RVIZ-RQT-VISUAL](https://github.com/
lovelyyoshino/RVIZ-RQT-VISUAL),如有需要私
聊博主
1. 项目背景与技术动机
1.1 传统ROS可视化工具的技术局限性分析
在机器人操作系统(ROS)的生态体系中,RViz和RQT作为核心的可视化工具,为机器人系统的开发、调试和监控提供了重要支撑。RViz基于Qt框架和OpenGL图形库构建,提供了强大的三维数据可视化能力,能够实时显示机器人的传感器数据、路径规划结果、定位信息等关键数据。RQT则作为Qt-based的工具集合,提供了节点图谱显示、参数编辑、话题监控等丰富的调试功能。然而,随着云计算、边缘计算和分布式机器人系统的快速发展,这些传统的桌面端工具逐渐暴露出明显的技术局限性。
首先,平台依赖性问题日益突出。传统的RViz和RQT工具需要在本地安装完整的ROS环境,包括底层的DDS通信中间件、消息类型定义、以及各种依赖库。这种重度依赖使得工具的部署和维护变得复杂,特别是在异构系统环境下,不同操作系统版本、依赖库版本之间的兼容性问题经常导致部署失败。此外,这些工具还需要图形界面支持,在云端服务器或嵌入式设备等无头环境中无法直接运行,限制了其在现代化部署架构中的应用。
其次,远程访问和协作能力的不足成为制约因素。现代机器人项目往往涉及分布在不同地理位置的多个开发团队,需要实时共享可视化数据和调试状态。传统桌面端工具难以支持多用户同时访问同一个机器人系统,也无法实现跨网络的实时协作调试。虽然可以通过VNC、SSH X11转发等技术实现远程访问,但这些方案在网络延迟、带宽限制、安全策略等方面都存在明显的局限性,用户体验较差。
1.2 Web技术在机器人可视化领域的技术优势
Web技术的跨平台特性和标准化程度为解决传统工具的局限性提供了新的技术路径。现代Web浏览器作为一个通用的运行平台,内置了强大的JavaScript引擎、WebGL图形渲染能力、WebSocket双向通信支持等功能,为构建复杂的可视化应用提供了坚实的技术基础。通过浏览器这一标准化平台,可以实现"一次开发,处处运行"的理想状态,大大降低了应用的部署门槛和维护成本。
WebGL技术的成熟为Web端的三维可视化提供了接近原生应用的性能表现。WebGL基于OpenGL ES标准,能够充分利用GPU的并行计算能力进行高效的图形渲染。结合现代JavaScript引擎的优化技术,如即时编译(JIT)、类型推断、内存管理优化等,Web应用在数据处理和渲染性能方面已经能够满足大多数机器人可视化场景的需求。
WebSocket协议的普及使得Web应用能够与后端服务建立持久的双向通信连接,实现真正的实时数据传输。相比于传统的HTTP请求-响应模式,WebSocket能够大幅降低通信延迟,提高数据传输效率。这为实现Web端的机器人数据可视化奠定了重要的技术基础。
2. 系统架构设计与技术栈分析
2.1 分层架构设计理念
RVIZ-RQT-VISUAL项目采用现代化的分层架构设计,将复杂的机器人可视化系统分解为职责清晰、耦合度低的功能模块。整体架构遵循前后端分离的设计原则,通过WebSocket协议实现实时双向通信,形成了"Web前端 + API服务层 + ROS2桥接层"的三层架构模式。这种架构设计不仅确保了系统的可扩展性和可维护性,还为后续的功能扩展和性能优化提供了良好的基础。
系统架构图:
┌─────────────────────────────────────────────────────────────────────────────────────┐
│ Web浏览器客户端 │
│ ┌─────────────────┐ ┌─────────────────┐ ┌─────────────────┐ │
│ │ Vue.js 3 │ │ Three.js │ │ Element Plus │ │
│ │ 组件系统 │ │ 3D渲染引擎 │ │ UI组件库 │ │
│ └─────────────────┘ └─────────────────┘ └─────────────────┘ │
│ ┌─────────────────────────────────────────────────────────────────────────────────┐ │
│ │ Pinia状态管理 + Composition API │ │
│ └─────────────────────────────────────────────────────────────────────────────────┘ │
└─────────────────────────────────────────────────────────────────────────────────────┘
│ WebSocket + HTTP
▼
┌─────────────────────────────────────────────────────────────────────────────────────┐
│ FastAPI Web服务层 │
│ ┌─────────────────┐ ┌─────────────────┐ ┌─────────────────┐ │
│ │ API路由 │ │ WebSocket │ │ 静态资源 │ │
│ │ 管理模块 │ │ 通信管理 │ │ 服务模块 │ │
│ └─────────────────┘ └─────────────────┘ └─────────────────┘ │
│ ┌─────────────────────────────────────────────────────────────────────────────────┐ │
│ │ Rosbridge协议实现 + 消息转换 │ │
│ └─────────────────────────────────────────────────────────────────────────────────┘ │
└─────────────────────────────────────────────────────────────────────────────────────┘
│ ROS2 DDS
▼
┌─────────────────────────────────────────────────────────────────────────────────────┐
│ ROS2生态系统 │
│ ┌─────────────────┐ ┌─────────────────┐ ┌─────────────────┐ │
│ │ 机器人节点 │ │ 传感器数据 │ │ 导航系统 │ │
│ │ (rclpy) │ │ 话题发布 │ │ 路径规划 │ │
│ └─────────────────┘ └─────────────────┘ └─────────────────┘ │
└─────────────────────────────────────────────────────────────────────────────────────┘
2.2 前端技术栈的深度选型分析
前端技术栈的选择体现了对现代Web开发趋势和机器人可视化特殊需求的深刻理解。Vue.js 3作为核心框架的选择并非偶然,其引入的Composition API为复杂的实时数据流处理提供了更加灵活和强大的状态管理方案。在机器人可视化场景中,需要同时处理来自多个传感器的高频数据流,传统的Options API在处理这种复杂状态逻辑时往往会导致代码结构混乱。Composition API通过函数式的组合方式,能够将相关的状态逻辑组织在一起,提高代码的可读性和可维护性。
Three.js的选择解决了Web环境下三维渲染的核心挑战。作为WebGL的高级抽象层,Three.js提供了完整的三维图形渲染管线,包括场景管理、几何体处理、材质系统、光照计算等功能。在机器人可视化中,需要同时渲染点云、激光雷达数据、三维模型、路径轨迹等多种类型的几何数据,Three.js的丰富API和优化的渲染引擎为这些复杂的可视化需求提供了强有力的支撑。特别是其内置的性能优化机制,如视锥剔除、几何体合并、材质批处理等,能够有效提升大规模数据的渲染性能。
Element Plus作为UI组件库的选择,主要考虑了其在企业级应用中的成熟度和丰富性。机器人调试和监控界面需要大量的表单控件、数据表格、图表组件等UI元素,Element Plus提供的现成组件能够大幅提升开发效率。同时,其设计语言与工程应用的严肃性相匹配,避免了过于花哨的视觉效果对专业用户造成的干扰。
2.3 后端架构的技术特点与优势
后端技术栈以FastAPI为核心,这一选择体现了对Python生态系统和异步编程模式的深度考量。FastAPI基于现代Python的类型注解和异步特性构建,在处理高并发连接和实时数据流方面具有显著优势。在机器人可视化场景中,后端服务需要同时处理多个WebSocket连接、接收高频的ROS消息、进行数据格式转换等任务,FastAPI的异步架构能够高效地处理这种I/O密集型的工作负载。
ROS2 rclpy作为Python的官方客户端库,提供了完整的ROS2功能访问能力。相比于其他语言的ROS2绑定,Python在数据处理、科学计算、快速原型开发等方面具有天然优势。特别是在处理复杂的消息类型转换、数据压缩、算法实现等任务时,Python丰富的第三方库生态系统能够提供强大的支撑。同时,Python的动态特性也为系统的灵活配置和运行时扩展提供了便利。
Rosbridge协议的实现是整个系统的技术核心之一。该协议定义了Web客户端与ROS系统之间的标准化通信接口,包括话题订阅、消息发布、服务调用、参数操作等功能。项目对该协议进行了完整实现,确保了与标准ROS工具的兼容性。这种标准化的设计使得系统不仅能够作为独立的可视化工具使用,还可以与其他基于Rosbridge的工具和服务进行无缝集成。
2.4 分层架构的精妙设计
系统的分层架构体现了软件工程中关注点分离的核心原则。表现层由 Vue.js 组件构成,负责用户界面的渲染和交互逻辑;业务逻辑层通过 Composable 函数封装,实现了状态管理和 API 调用的抽象;数据访问层则通过 WebSocket 连接和 HTTP API 与后端通信。
在后端,同样采用了清晰的分层结构。API 层负责 HTTP 请求的路由和响应处理;服务层实现了具体的业务逻辑,包括 ROS2 节点管理、主题订阅和消息转换;数据层则直接与 ROS2 系统交互,处理底层的消息传递和状态同步。
这种分层设计的优势在于,每一层都有明确的职责边界,便于测试、维护和扩展。当需要支持新的 ROS2 消息类型时,主要的修改集中在数据层和服务层;当需要优化用户界面时,变更主要局限在表现层,不会影响底层的数据处理逻辑。
# 后端核心架构示例:FastAPI + ROS2 的桥接实现
from fastapi import FastAPI, WebSocket
import rclpy
from rclpy.node import Node
class RosbridgeService:
"""Rosbridge 核心服务类"""
def __init__(self, settings):
self.node = Node('ros_web_viz_bridge')
self.subscribers = {}
self.publishers = {}
self.connection_manager = ConnectionManager()
async def handle_websocket(self, websocket: WebSocket):
"""处理 WebSocket 连接的核心逻辑"""
client_id = await self.connection_manager.connect(websocket)
try:
while True:
data = await websocket.receive_text()
await self._handle_message(client_id, json.loads(data))
except WebSocketDisconnect:
self.connection_manager.disconnect(client_id)
3. 核心功能实现与技术创新
3.1 ROS2消息类型的Web端适配机制
RVIZ-RQT-VISUAL项目在ROS2消息类型适配方面实现了重要的技术突破,成功将ROS2生态系统中的复杂消息格式转换为Web端可以高效处理的数据结构。这一过程涉及对ROS2消息定义语言(IDL)的深度理解、二进制数据格式的精确解析,以及针对不同消息类型的专门优化策略。系统支持的核心消息类型包括sensor_msgs/PointCloud2点云数据、sensor_msgs/LaserScan激光雷达数据、nav_msgs/OccupancyGrid栅格地图、geometry_msgs/PoseStamped位姿信息、nav_msgs/Path路径规划结果、visualization_msgs/Marker和MarkerArray可视化标记等。
点云数据的处理是整个系统中最具挑战性的技术环节之一。sensor_msgs/PointCloud2消息采用了灵活的字段定义机制,能够描述不同维度和属性的点云数据。系统实现了完整的点云解析算法,能够正确处理包含位置、颜色、强度、法向量等多种属性的点云数据。针对点云数据量大、传输带宽要求高的特点,系统实现了多级优化策略,包括空间网格采样、字段选择性传输、Base64编码压缩等技术,在保持可视化质量的同时显著降低了网络传输负载。
激光雷达数据的可视化实现了2D和3D两种显示模式。在2D模式下,系统将激光扫描数据投影到水平面上,形成扇形的激光束显示效果;在3D模式下,系统根据激光雷达的安装位置和姿态信息,将扫描数据转换为三维空间中的线段集合,提供更加直观的空间感知效果。系统还支持多线激光雷达的数据融合显示,能够同时处理来自不同激光雷达传感器的数据流。
3.2 Web端三维交互机制的设计与实现
传统RViz中的机器人导航交互功能在Web环境中面临着全新的技术挑战。系统需要在浏览器环境中重现桌面应用的精确交互体验,同时还要考虑触屏设备、移动端等多种交互方式的支持。项目在这方面实现了多项技术创新,包括基于Three.js的三维场景交互管理、精确的鼠标射线投射算法、视觉反馈的实时渲染机制等。
2D导航目标设置功能的实现体现了Web技术与机器人导航系统的深度融合。用户通过鼠标在三维场景中点击并拖拽的方式,即可完成机器人导航目标点的设置。系统在用户操作过程中提供实时的视觉反馈,包括目标点位置预览、方向指示箭头、距离和角度信息显示等。当用户确认操作后,系统自动构造符合ROS2标准的geometry_msgs/PoseStamped消息,并通过WebSocket连接发布到指定话题,实现与机器人导航系统的无缝对接。
初始位姿估计功能采用了类似的交互设计理念,但在技术实现上更加复杂。系统需要准确计算用户在三维场景中的操作意图,将鼠标的二维移动转换为机器人在三维空间中的位置和姿态信息。这一过程涉及复杂的坐标系变换、投影计算、姿态插值等数学运算,要求系统具备高精度的几何计算能力。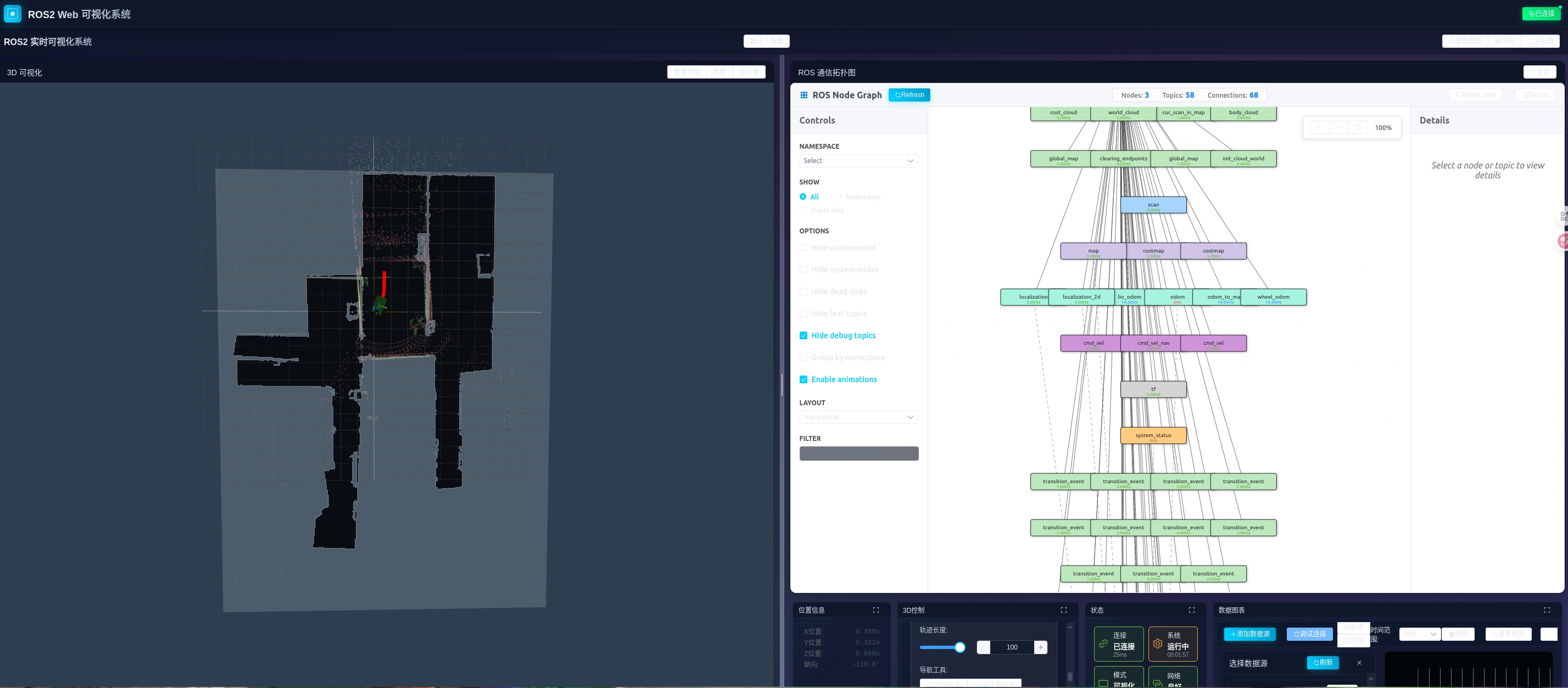
3.3 RQT工具集的Web化改造
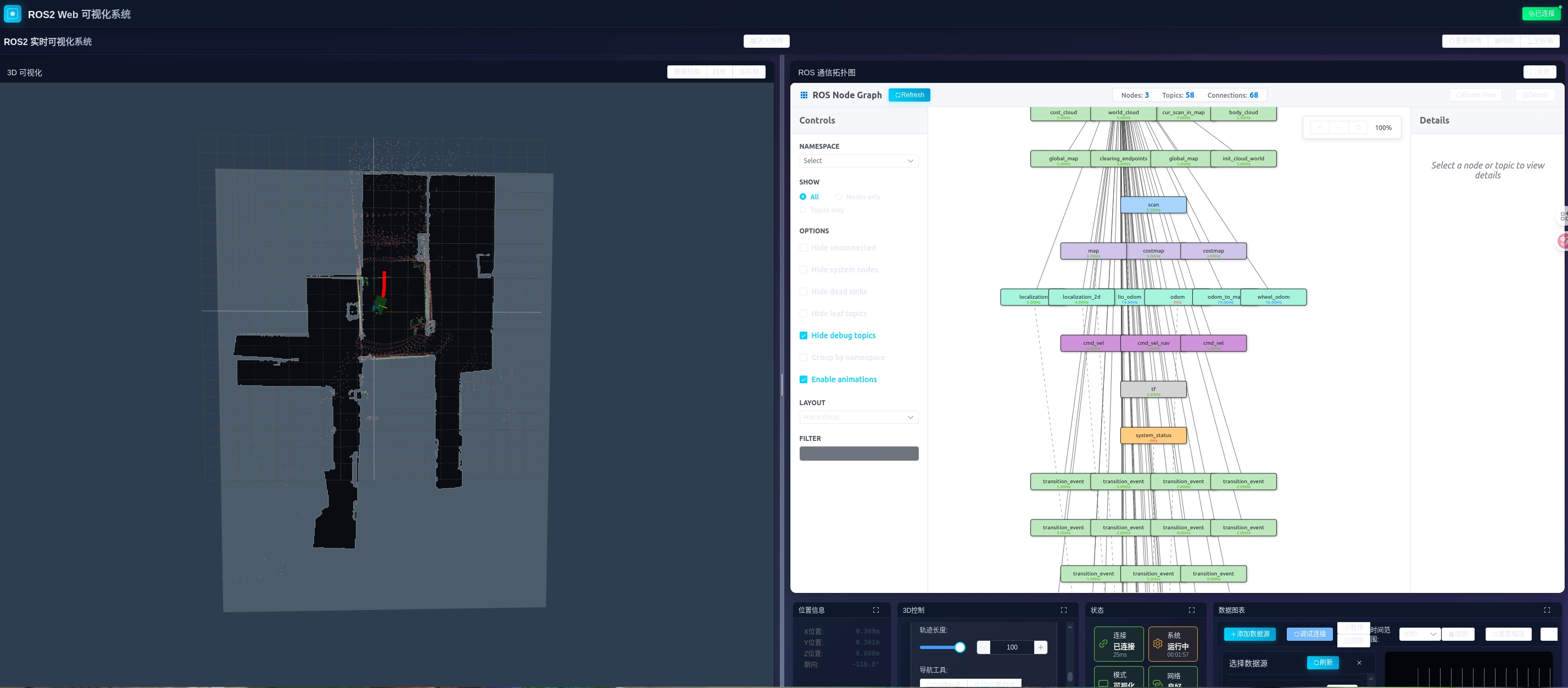
RQT作为ROS生态系统中重要的调试和监控工具集,其Web化改造面临着从桌面应用到浏览器环境的全面技术迁移。项目成功实现了RQT核心功能的Web端重构,包括节点拓扑图可视化、话题监控、参数编辑、服务调用等关键功能。这一过程不仅涉及用户界面的重新设计,更重要的是底层数据获取和处理机制的完全重构。
节点拓扑图可视化功能采用了基于力导向算法的自动布局机制,能够动态生成美观且易于理解的节点关系图。系统通过定期查询ROS2系统的节点信息、话题连接关系、服务接口定义等元数据,构建完整的系统拓扑结构。可视化引擎使用D3.js库实现,支持节点拖拽、缩放、筛选等交互操作,为用户提供直观的系统结构分析工具。
话题监控功能实现了对ROS2系统中所有活跃话题的实时监控,包括话题名称、消息类型、发布频率、数据大小等关键信息。系统采用高效的轮询机制,定期获取话题状态信息,并通过优化的数据结构和渲染算法,确保在处理大量话题时仍能保持流畅的用户体验。用户可以通过筛选、排序等功能快速定位感兴趣的话题,并进行进一步的分析和调试操作。

4. 核心算法与技术实现深度分析
4.1 前端架构的技术创新与实现细节
4.1.1 Vue.js 3 Composition API在复杂状态管理中的应用
Vue.js 3的Composition API为处理机器人可视化系统中的复杂状态逻辑提供了强大的技术支撑。在传统的Options API模式下,处理多个传感器数据流、连接状态管理、用户交互状态等复杂逻辑时,往往会导致代码散布在不同的生命周期钩子中,降低了代码的内聚性和可维护性。Composition API通过函数式的组合方式,将相关的状态逻辑组织在一起,形成了更加清晰和可复用的代码结构。
// useRosbridge Composable的高级实现
export function useRosbridge() {
const connectionStore = useConnectionStore()
const subscribedTopics = ref(new Map())
const messageBuffer = ref(new Map())
const connectionHealth = ref({
lastHeartbeat: null,
latency: 0,
packetLoss: 0
})
// 智能重连机制
const { pause, resume, isActive } = useIntervalFn(() => {
if (!connectionStore.isConnected) {
attemptReconnection()
}
updateConnectionHealth()
}, 5000)
const subscribe = (topic, messageType, callback, options = {}) => {
const {
qos = 'default',
bufferSize = 100,
throttle = 0
} = options
if (!connectionStore.isConnected) {
console.warn('WebSocket连接未建立,订阅请求将在连接建立后重试')
return scheduleRetrySubscription(topic, messageType, callback, options)
}
const subscriptionId = generateSubscriptionId(topic, messageType)
const subscription = {
id: subscriptionId,
topic,
messageType,
callback: throttle > 0 ? throttleCallback(callback, throttle) : callback,
qos,
bufferSize,
timestamp: Date.now(),
messageCount: 0,
lastMessage: null
}
subscribedTopics.value.set(subscriptionId, subscription)
initializeMessageBuffer(subscriptionId, bufferSize)
return connectionStore.subscribeTopic(topic, messageType, (message) => {
handleIncomingMessage(subscriptionId, message)
}, { qos })
}
const handleIncomingMessage = (subscriptionId, message) => {
const subscription = subscribedTopics.value.get(subscriptionId)
if (!subscription) return
// 更新消息统计
subscription.messageCount++
subscription.lastMessage = Date.now()
// 消息缓冲管理
const buffer = messageBuffer.value.get(subscriptionId)
if (buffer.length >= subscription.bufferSize) {
buffer.shift() // 移除最旧的消息
}
buffer.push(message)
// 执行回调
try {
subscription.callback(message, {
count: subscription.messageCount,
buffer: [...buffer],
latency: Date.now() - message.header?.stamp?.sec * 1000 || 0
})
} catch (error) {
console.error(`处理消息时发生错误 [${subscription.topic}]:`, error)
}
}
// 生命周期管理
onMounted(() => {
resume()
})
onUnmounted(() => {
pause()
// 清理所有订阅
subscribedTopics.value.forEach((subscription, id) => {
connectionStore.unsubscribeTopic(subscription.topic)
})
subscribedTopics.value.clear()
messageBuffer.value.clear()
})
return {
subscribe,
unsubscribe,
publish,
connectionHealth: readonly(connectionHealth),
subscribedTopics: readonly(subscribedTopics),
getMessageHistory: (subscriptionId) => messageBuffer.value.get(subscriptionId) || []
}
}
这种高级的Composable实现不仅封装了基础的ROS通信功能,还集成了连接健康监控、消息缓冲管理、错误处理、性能统计等高级特性。通过这种方式,组件层的代码可以专注于业务逻辑的实现,而所有的底层复杂性都被优雅地封装在可复用的函数中。
4.1.2 Three.js高性能渲染引擎的设计与优化
Three.js作为Web端三维渲染的核心引擎,在处理机器人可视化场景中的大规模数据时面临着严峻的性能挑战。项目团队通过深入分析WebGL渲染管线、GPU内存管理、JavaScript引擎优化等技术要点,设计了一套完整的性能优化解决方案。这套方案不仅解决了大规模点云数据的实时渲染问题,还确保了系统在各种硬件配置下的稳定运行。
渲染对象的生命周期管理是性能优化的关键环节。传统的Three.js应用中,频繁的几何体创建和销毁会导致严重的垃圾回收压力,特别是在处理实时数据流时。项目实现了基于对象池的资源管理机制,通过预分配和复用几何体、材质、纹理等渲染资源,显著减少了运行时的内存分配开销。对象池不仅管理几何体对象,还包括顶点缓冲区、索引缓冲区、着色器程序等底层资源,形成了完整的资源回收利用体系。
层级细节(LOD)技术的应用是另一个重要的性能优化策略。系统根据观察距离动态调整渲染精度,对于距离相机较远的对象使用较低的几何精度和纹理分辨率,对于近距离对象则保持高精度渲染。这种策略在保证视觉质量的同时,显著减少了GPU的计算负担。同时,系统还实现了视锥剔除算法,自动排除视野范围外的对象,避免无效的渲染计算。
// 高性能点云渲染器的完整实现
class PointCloudRenderer {
constructor(scene) {
this.scene = scene
this.pointsMaterial = new THREE.PointsMaterial({
size: 0.05,
vertexColors: true
})
this.geometryPool = [] // 几何体对象池
}
updatePointCloud(pointCloudData) {
// 解码 Base64 点云数据
const decodedData = this.decodePointCloudData(pointCloudData)
// 从对象池获取或创建几何体
const geometry = this.getGeometry()
// 批量更新顶点数据
const positions = new Float32Array(decodedData.positions)
const colors = new Float32Array(decodedData.colors)
geometry.setAttribute('position', new THREE.BufferAttribute(positions, 3))
geometry.setAttribute('color', new THREE.BufferAttribute(colors, 3))
// 创建点云对象并添加到场景
const points = new THREE.Points(geometry, this.pointsMaterial)
this.scene.add(points)
}
decodePointCloudData(data) {
// 高效的点云数据解码算法
if (data.data_encoding === 'base64') {
const buffer = Uint8Array.from(atob(data.data), c => c.charCodeAt(0))
return this.parsePointCloudBuffer(buffer, data.fields)
}
return this.parsePointCloudArray(data.data, data.fields)
}
}
其次是渲染性能的动态调节机制。系统实现了基于帧率的自适应渲染策略,当检测到帧率下降时,自动降低点云密度、减少粒子数量或调整渲染质量,确保流畅的用户体验。这种策略特别适合在不同性能的设备上提供一致的使用体验。
4.2 响应式设计与用户交互
在用户交互设计方面,项目充分考虑了 Web 环境的特点和用户习惯。三维场景的相机控制采用了 Three.js 的 OrbitControls,提供了平滑的缩放、旋转和平移操作。同时,针对移动设备优化了触控操作,支持多点触控的手势识别。
导航工具的实现特别值得关注。传统 RViz 中的 2D 目标点设置和初始位姿估计功能,在 Web 环境中通过鼠标交互和可视化反馈得到了很好的重现。用户可以在三维场景中直接点击设置目标点,系统会实时显示方向指示器,并在确认后发布相应的 ROS 消息。
// 导航工具的交互实现
const handleMouseDown = (event) => {
if (currentNavigationTool === '2d_goal') {
const intersect = getMouseIntersection(event)
if (intersect) {
dragStartPosition = intersect.point
isDragging = true
createPreviewArrow(intersect.point)
}
}
}
const handleMouseMove = (event) => {
if (isDragging && dragStartPosition) {
const intersect = getMouseIntersection(event)
if (intersect) {
updatePreviewArrow(dragStartPosition, intersect.point)
}
}
}
const handleMouseUp = (event) => {
if (isDragging && dragStartPosition) {
const intersect = getMouseIntersection(event)
if (intersect) {
const goal = calculateGoalPose(dragStartPosition, intersect.point)
publishGoalPose(goal)
removePreviewArrow()
}
isDragging = false
dragStartPosition = null
}
}
这种直观的交互方式大大降低了用户的学习成本,即使是初次使用的用户也能快速上手。同时,系统提供了丰富的视觉反馈,包括鼠标悬停高亮、拖拽预览和操作确认等,提升了整体的用户体验。
4.3 后端核心算法与Rosbridge协议实现
4.3.1 FastAPI异步架构在高并发场景下的技术实现
FastAPI作为后端服务的核心框架,其异步编程特性为处理机器人可视化场景中的高并发连接和实时数据流提供了理想的技术基础。在传统的同步Web框架中,每个客户端连接都需要独占一个线程资源,当连接数量增加时,系统资源消耗会急剧上升。FastAPI基于Python的asyncio库和ASGI标准,采用事件驱动的异步I/O模型,能够在单个线程中高效处理数千个并发连接。
系统的异步架构设计围绕着几个核心组件展开:异步WebSocket连接管理器、异步ROS2消息处理器、异步任务调度器和异步数据流管道。这些组件通过协程和事件循环机制协同工作,形成了高效的并发处理体系。特别是在处理来自多个传感器的高频数据流时,异步架构能够避免阻塞操作,确保系统的响应性和稳定性。
FastAPI 基于 Python 3.7+ 的 async/await 语法,为高并发场景提供了原生支持。在机器人可视化应用中,需要同时处理多个客户端连接、实时数据流和 ROS2 消息,异步编程模式显著提升了系统的吞吐能力和响应性能。
# FastAPI 应用的核心配置
from fastapi import FastAPI, WebSocket, WebSocketDisconnect
from fastapi.middleware.cors import CORSMiddleware
import asyncio
import logging
class RosbridgeService:
def __init__(self, settings):
self.settings = settings
self.connection_manager = ConnectionManager(settings.max_connections)
self.node = None
self.subscribers = {}
self.publishers = {}
self.message_queue = None
self.message_processor_task = None
async def start(self):
"""启动服务的完整流程"""
try:
# 获取事件循环
self._loop = asyncio.get_event_loop()
# 初始化异步消息队列
self.message_queue = asyncio.Queue(maxsize=1000)
# 初始化 ROS2 节点
if not rclpy.ok():
rclpy.init()
self.node = Node('ros_web_viz_bridge')
# 启动消息处理任务
self.message_processor_task = asyncio.create_task(self._message_processor_loop())
# 启动 ROS2 事件循环
self.ros_spin_task = asyncio.create_task(self._ros_spin_loop())
except Exception as e:
logger.error(f"Failed to start Rosbridge service: {e}")
raise
这种设计的关键在于将 ROS2 的同步回调机制与 FastAPI 的异步处理模式无缝集成。通过事件循环和消息队列,系统能够高效地处理 ROS2 消息的接收、转换和分发,同时保持 Web 服务的高响应性。
4.3.2 消息转换的精妙实现
ROS2 消息与 JSON 格式之间的转换是整个系统的核心挑战之一。ROS2 使用强类型的二进制消息格式,包含复杂的嵌套结构、数组字段和特殊数据类型。项目实现了一套完整的消息转换系统,能够智能处理各种 ROS2 消息类型。
def _message_to_dict(self, msg) -> dict:
"""将 ROS 消息转换为字典的核心算法"""
try:
# 特殊处理点云数据
if isinstance(msg, PointCloud2):
return self._process_pointcloud_data(msg)
# 特殊处理图像数据
if isinstance(msg, (Image, CompressedImage)):
return self._process_image_data(msg)
if hasattr(msg, '__slots__'):
result = {}
for slot in msg.__slots__:
value = getattr(msg, slot)
# 处理时间类型
if isinstance(value, Time):
result[slot] = {
'sec': int(value.sec),
'nanosec': int(value.nanosec)
}
# 处理嵌套消息
elif hasattr(value, '__slots__'):
result[slot] = self._message_to_dict(value)
# 处理数组类型
elif isinstance(value, list):
result[slot] = [
self._message_to_dict(item) if hasattr(item, '__slots__') else
float(item) if isinstance(item, (int, float, np.number)) else
item for item in value
]
else:
result[slot] = value
return result
except Exception as e:
logger.error(f"Failed to convert message to dict: {e}")
return {"error": str(e), "message_type": type(msg).__name__}
消息转换系统的精妙之处在于其层次化的处理策略。对于不同类型的数据,采用不同的优化手段:时间戳进行精确转换、几何数据保持数值精度、大型数据采用压缩编码。这种差异化处理确保了数据的完整性和传输效率的平衡。
4.4 连接管理与QoS适配
ROS2 的 QoS(Quality of Service)系统为不同应用场景提供了灵活的配置选项。Web 端的可视化应用需要适配各种 QoS 配置,特别是与 rosbag 播放器和实时传感器的兼容性。
async def _create_subscriber(self, topic: str, msg_type: str):
"""创建适配性强的 ROS2 订阅者"""
try:
msg_class = self._get_message_class(msg_type)
if msg_class is None:
raise ValueError(f"Unsupported message type: {msg_type}")
# 智能 QoS 检测和适配
publisher_qos_profiles = []
if self.node:
try:
publishers_info = self.node.get_publishers_info_by_topic(topic)
for pub_info in publishers_info:
publisher_qos_profiles.append(pub_info.qos_profile)
except Exception as e:
logger.warning(f"Could not get publisher QoS info: {e}")
# 根据发布者 QoS 自动适配
if publisher_qos_profiles:
first_pub_qos = publisher_qos_profiles[0]
if first_pub_qos.history == 3: # rosbag2 特殊情况
qos_profile = QoSProfile(
reliability=QoSReliabilityPolicy.RELIABLE,
durability=QoSDurabilityPolicy.VOLATILE,
history=QoSHistoryPolicy.KEEP_ALL,
depth=1000
)
else:
qos_profile = QoSProfile(
reliability=QoSReliabilityPolicy.RELIABLE,
durability=QoSDurabilityPolicy.VOLATILE,
history=QoSHistoryPolicy.KEEP_LAST,
depth=10
)
else:
# 默认配置
qos_profile = QoSProfile(
reliability=QoSReliabilityPolicy.RELIABLE,
durability=QoSDurabilityPolicy.VOLATILE,
history=QoSHistoryPolicy.KEEP_LAST,
depth=10
)
subscriber = self.node.create_subscription(
msg_class, topic, self._create_callback(topic), qos_profile
)
self.subscribers[topic] = subscriber
except Exception as e:
logger.error(f"Failed to create subscriber for {topic}: {e}")
这种自适应的 QoS 配置机制解决了 Web 端与各种 ROS2 数据源的兼容性问题,无论是实时传感器数据还是历史数据回放,都能获得稳定的数据接收效果。
5. 实时通信机制:WebSocket 与 Rosbridge
实时通信是 Web 端机器人可视化系统的生命线。项目通过 WebSocket 技术实现了高效的双向通信机制,并严格遵循 Rosbridge 协议规范,确保与标准 ROS 工具的兼容性。
5.1 WebSocket 连接管理的高可用设计
WebSocket 连接的稳定性直接影响用户体验。项目实现了完善的连接管理机制,包括自动重连、心跳检测和连接池管理等功能。
class ConnectionManager:
"""高可用的 WebSocket 连接管理器"""
def __init__(self, max_connections: int = 100):
self.max_connections = max_connections
self.active_connections: Dict[str, WebSocket] = {}
self.connection_info: Dict[str, ConnectionInfo] = {}
async def connect(self, websocket: WebSocket, client_id: str) -> bool:
"""安全的连接建立过程"""
if len(self.active_connections) >= self.max_connections:
await websocket.close(code=1008, reason="Max connections reached")
return False
await websocket.accept()
self.active_connections[client_id] = websocket
self.connection_info[client_id] = ConnectionInfo(
client_id=client_id,
connected_at=datetime.now(),
subscribed_topics=[],
message_count=0
)
return True
async def broadcast(self, message: dict):
"""智能消息广播机制"""
if not self.active_connections:
return False
message_text = json.dumps(message)
disconnected_clients = []
sent_count = 0
# 针对主题消息的定向发送
if message.get('op') == 'publish' and 'topic' in message:
topic = message['topic']
for client_id, websocket in self.active_connections.items():
client_info = self.connection_info.get(client_id)
if client_info and topic in client_info.subscribed_topics:
try:
await websocket.send_text(message_text)
client_info.message_count += 1
sent_count += 1
except Exception as e:
disconnected_clients.append(client_id)
# 清理断开的连接
for client_id in disconnected_clients:
self.disconnect(client_id)
return sent_count > 0
这种设计的优势在于其智能化的消息分发机制。系统不会盲目向所有客户端广播消息,而是根据客户端的订阅状态进行精准投递,显著减少了网络带宽的浪费和客户端的处理负担。
5.2 Rosbridge 协议的完整实现
Rosbridge 协议是 ROS 与 Web 技术交互的标准接口,定义了包括订阅、发布、服务调用等在内的完整通信规范。项目对该协议进行了全面实现,确保与其他 ROS 工具的兼容性。
async def _handle_message(self, client_id: str, message: dict):
"""Rosbridge 协议消息处理的核心逻辑"""
try:
op = message.get('op')
request_id = message.get('id')
# 定义协议操作映射
operation_handlers = {
'subscribe': self._handle_subscribe,
'unsubscribe': self._handle_unsubscribe,
'advertise': self._handle_advertise,
'unadvertise': self._handle_unadvertise,
'publish': self._handle_publish,
'get_topics': self._handle_get_topics,
'get_nodes': self._handle_get_nodes,
'get_topic_types': self._handle_get_topic_types,
'get_topic_frequencies': self._handle_get_topic_frequencies,
'get_services': self._handle_get_services,
'get_service_types': self._handle_get_service_types,
'get_params': self._handle_get_params
}
handler = operation_handlers.get(op)
if handler:
if op.startswith('get_'):
await handler(client_id, request_id)
else:
await handler(client_id, message)
else:
# 未知操作的错误处理
if request_id:
await self.connection_manager.send_to_client(client_id, {
'op': 'error',
'id': request_id,
'error': f'Unknown operation: {op}'
})
except Exception as e:
logger.error(f"Error handling message from {client_id}: {e}")
# 向客户端发送错误响应
request_id = message.get('id')
if request_id:
await self.connection_manager.send_to_client(client_id, {
'op': 'error',
'id': request_id,
'error': str(e)
})
协议实现的关键在于错误处理和状态一致性维护。每个操作都有完善的错误处理机制,确保异常情况下系统的稳定性。同时,通过请求 ID 机制,客户端可以追踪特定请求的处理结果,实现可靠的异步通信。
5.3 数据压缩与传输优化
在实时传输大型数据(如点云、图像)时,数据压缩成为性能优化的关键环节。项目实现了多种压缩策略,根据数据类型和大小自动选择最优方案。
def _process_pointcloud_data(self, pointcloud_msg) -> dict:
"""点云数据的智能压缩处理"""
try:
total_points = pointcloud_msg.width * pointcloud_msg.height
max_points = 50000 # 动态调整的最大点数阈值
result = {
'header': self._message_to_dict(pointcloud_msg.header),
'height': pointcloud_msg.height,
'width': pointcloud_msg.width,
'fields': [self._field_to_dict(field) for field in pointcloud_msg.fields],
'is_bigendian': pointcloud_msg.is_bigendian,
'point_step': pointcloud_msg.point_step,
'row_step': pointcloud_msg.row_step,
'is_dense': pointcloud_msg.is_dense
}
if total_points > max_points and total_points > 0:
# 智能采样算法
sample_step = max(1, total_points // max_points)
sampled_data = []
point_step = pointcloud_msg.point_step
for i in range(0, total_points, sample_step):
byte_start = i * point_step
byte_end = byte_start + point_step
if byte_end <= len(pointcloud_msg.data):
sampled_data.extend(pointcloud_msg.data[byte_start:byte_end])
# Base64 编码传输
import base64
result['data'] = base64.b64encode(bytes(sampled_data)).decode('ascii')
result['data_encoding'] = 'base64'
result['sampled'] = True
result['original_points'] = total_points
result['sample_step'] = sample_step
else:
# 小数据量直接传输或轻量压缩
if len(pointcloud_msg.data) > 10000:
import base64
result['data'] = base64.b64encode(pointcloud_msg.data).decode('ascii')
result['data_encoding'] = 'base64'
else:
result['data'] = list(pointcloud_msg.data)
result['data_encoding'] = 'array'
result['sampled'] = False
return result
except Exception as e:
logger.error(f"Failed to process pointcloud data: {e}")
return {'error': str(e), 'data': []}
这种自适应的数据处理策略在保证可视化质量的前提下,最大化了传输效率。通过智能采样、格式优化和编码选择,系统能够在不同网络条件下提供流畅的用户体验。
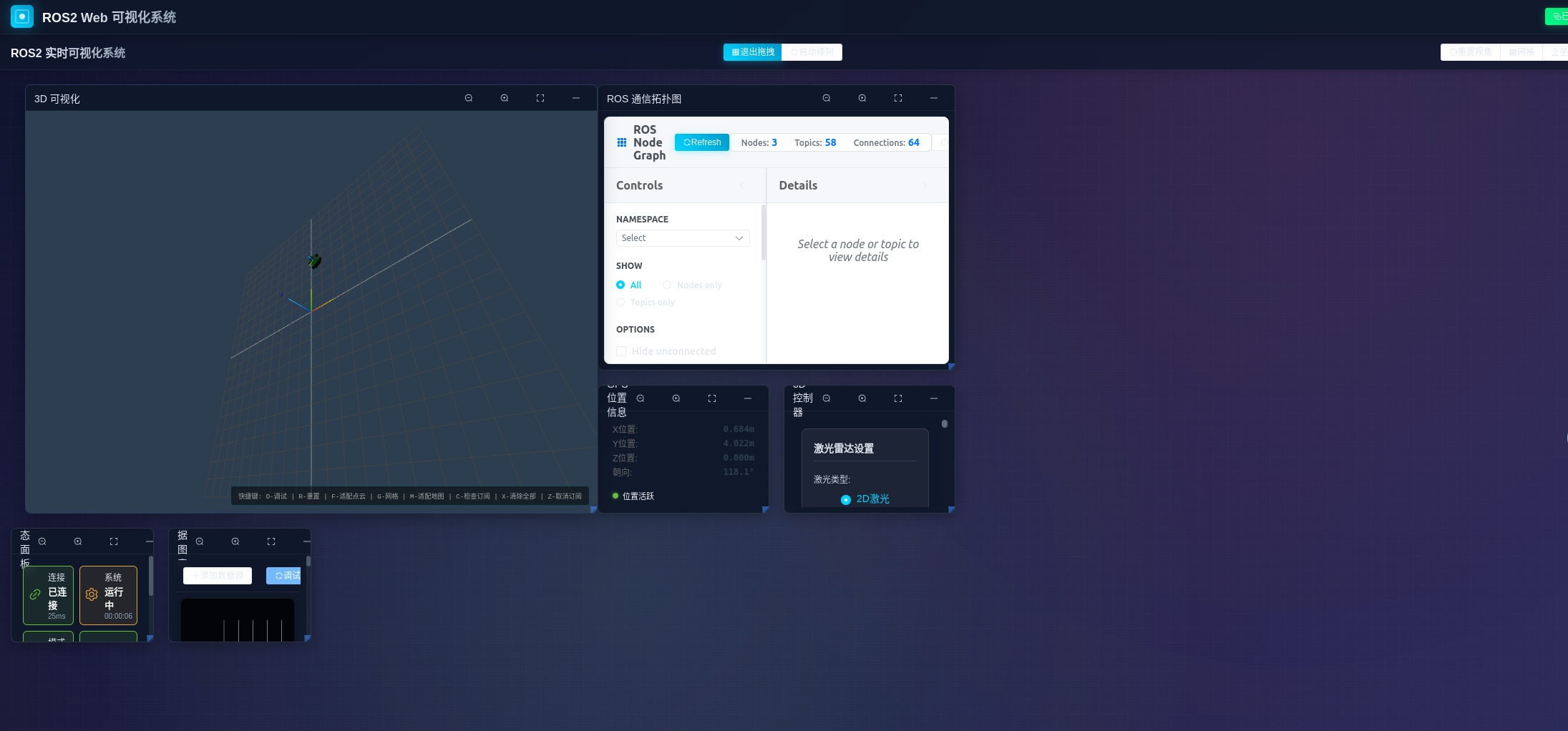
5.4 响应式界面适配
考虑到 Web 应用需要在各种设备上运行,项目实现了完善的响应式设计,能够在桌面、平板和手机上提供优质的用户体验。
<template>
<div class="rviz-container" :class="{ 'mobile-mode': isMobile }">
<!-- 主要的3D视图区域 -->
<div class="scene-container" ref="sceneContainer">
<Scene3D
@object-selected="handleObjectSelection"
@camera-moved="handleCameraMove"
:mobile-mode="isMobile"
/>
</div>
<!-- 可折叠的控制面板 -->
<div class="control-panel" :class="{ 'collapsed': panelCollapsed }">
<div class="panel-header" @click="togglePanel">
<h3>控制面板</h3>
<el-icon><ArrowLeft v-if="!panelCollapsed" /><ArrowRight v-else /></el-icon>
</div>
<div class="panel-content" v-show="!panelCollapsed">
<VisualizationPlugins />
<TopicSubscription />
<DisplaySettings />
</div>
</div>
<!-- 移动端的浮动工具栏 -->
<div class="mobile-toolbar" v-if="isMobile">
<el-button-group>
<el-button @click="setNavigationTool('2d_goal')" type="primary" size="small">
<el-icon><Location /></el-icon>
</el-button>
<el-button @click="setNavigationTool('2d_pose')" type="success" size="small">
<el-icon><Position /></el-icon>
</el-button>
<el-button @click="resetCamera" size="small">
<el-icon><RefreshLeft /></el-icon>
</el-button>
</el-button-group>
</div>
</div>
</template>
<script>
export default {
name: 'RVizInterface',
data() {
return {
isMobile: false,
panelCollapsed: false
}
},
mounted() {
this.checkMobileMode()
window.addEventListener('resize', this.checkMobileMode)
},
methods: {
checkMobileMode() {
this.isMobile = window.innerWidth < 768
// 移动端默认折叠控制面板
if (this.isMobile && !this.panelCollapsed) {
this.panelCollapsed = true
}
},
togglePanel() {
this.panelCollapsed = !this.panelCollapsed
}
}
}
</script>
<style scoped>
.rviz-container {
display: flex;
height: 100vh;
background: #2c3e50;
}
.scene-container {
flex: 1;
position: relative;
overflow: hidden;
}
.control-panel {
width: 350px;
background: #34495e;
border-left: 1px solid #7f8c8d;
transition: width 0.3s ease;
}
.control-panel.collapsed {
width: 50px;
}
.mobile-toolbar {
position: fixed;
bottom: 20px;
left: 50%;
transform: translateX(-50%);
z-index: 1000;
background: rgba(0, 0, 0, 0.8);
border-radius: 25px;
padding: 10px;
}
/* 移动端适配 */
.mobile-mode .control-panel {
position: fixed;
top: 0;
right: -300px;
height: 100vh;
width: 300px;
z-index: 999;
transition: right 0.3s ease;
}
.mobile-mode .control-panel:not(.collapsed) {
right: 0;
}
</style>
这种响应式设计确保了系统在不同设备上都能提供适宜的用户体验。在移动设备上,控制面板变为浮动模式,主要操作通过底部工具栏进行,最大化了三维视图的显示区域。
6. 多阶段构建的优化策略
…详情请参照古月居

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献56条内容
已为社区贡献56条内容

所有评论(0)