探索 H2/H 无穷半车悬架控制:基于 4 自由度悬架模型的奇妙之旅
H2/H无穷半车悬架控制-4自由度悬架:s函数搭建悬架模型、随机路面激励模型、LMI求解文件。 赠送word详解文件
在汽车工程领域,悬架系统的性能对于车辆的行驶舒适性、操控稳定性起着至关重要的作用。今天咱们就来深入聊聊 H2/H 无穷半车悬架控制,并且围绕 4 自由度悬架模型,看看如何通过 s 函数搭建悬架模型、随机路面激励模型,以及利用 LMI 求解文件来优化控制。最后还会给大家赠送 word 详解文件哦,方便深入研究。
4 自由度悬架模型基础
4 自由度悬架模型通常考虑车身垂直位移、俯仰角位移以及两个车轮的垂直位移。这种模型能够较为准确地描述车辆悬架在行驶过程中的动态特性。想象一下,车辆行驶在路上,车身会因为路面的起伏而上下颠簸,同时还可能产生俯仰运动,而车轮也会随着路面情况有自己的垂直跳动,这就是 4 自由度悬架模型所关注的关键运动状态。
s 函数搭建悬架模型
什么是 s 函数
s 函数(System Function)是一种用于在 Simulink 环境中创建自定义模块的有力工具。它允许我们用 MATLAB 代码来定义模块的输入输出关系、动态特性等。对于悬架模型来说,使用 s 函数可以更加灵活地实现复杂的动力学方程。
代码示例与分析
function [sys,x0,str,ts] = suspension_sfunc(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
% 设置输入端口个数
sizes.NumInputPorts = 2;
% 设置输出端口个数
sizes.NumOutputPorts = 4;
% 设置连续状态个数
sizes.NumContStates = 4;
% 设置离散状态个数
sizes.NumDiscStates = 0;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [0;0;0;0];
str = [];
ts = [0 0];
end
function sys=mdlDerivatives(t,x,u)
% 这里根据悬架动力学方程计算状态变量的导数
% 假设已知一些参数,如质量、刚度、阻尼等
m1 = 1000; % 车身质量
m2 = 100; % 车轮质量
k1 = 20000; % 悬架刚度
k2 = 200000; % 轮胎刚度
c1 = 2000; % 悬架阻尼
z1 = x(1); % 车身垂直位移
theta = x(2); % 车身俯仰角位移
z2 = x(3); % 左前轮垂直位移
z3 = x(4); % 右前轮垂直位移
f1 = u(1); % 左前轮路面激励力
f2 = u(2); % 右前轮路面激励力
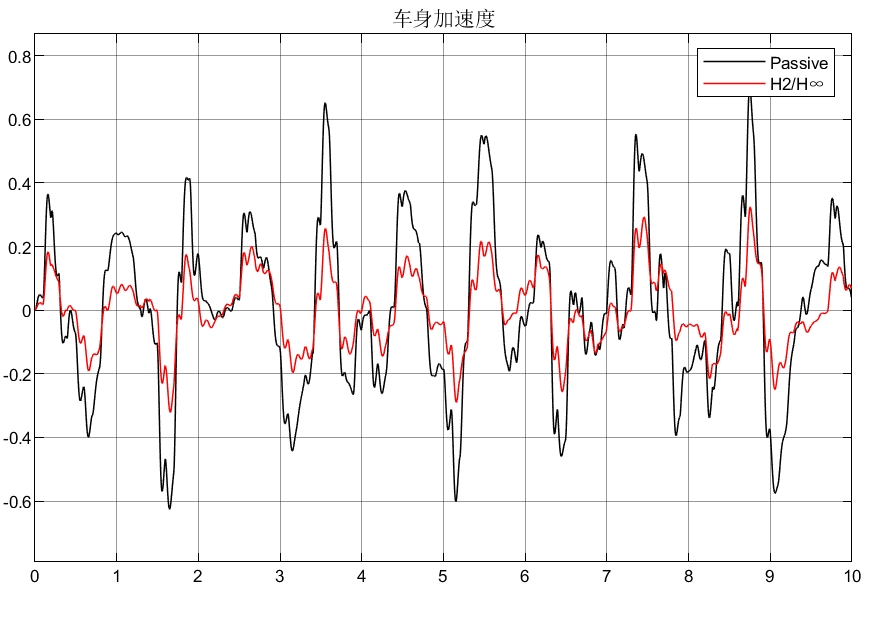
% 计算车身垂直方向加速度
dz1dt = (m2*(k2*(f1 - z2) + k2*(f2 - z3)) - 2*c1*(dz1dt - (dz2dt + L*theta*cos(theta)/2)) - 2*k1*(z1 - (z2 + L*theta*cos(theta)/2)))/m1;
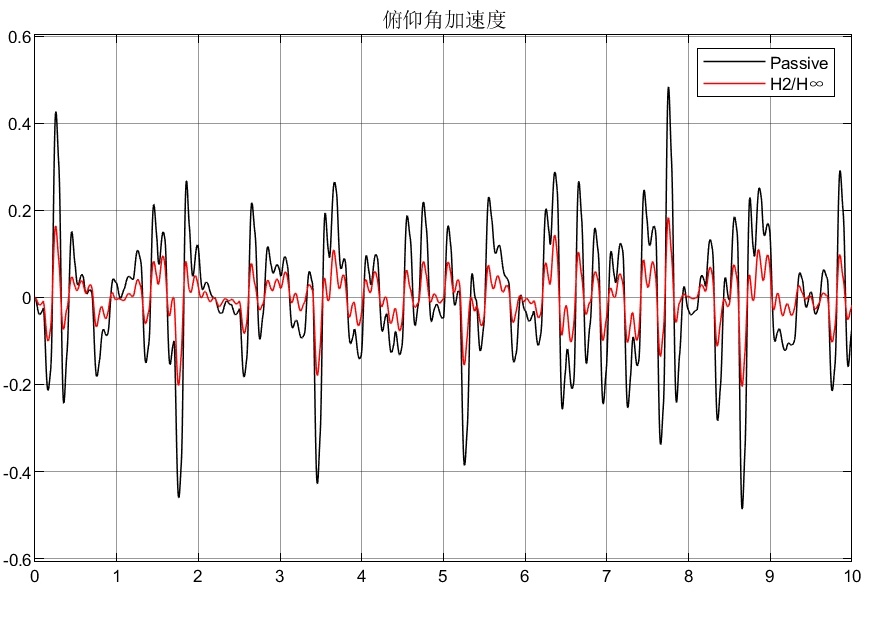
% 计算车身俯仰角加速度
dthetadt = (L*(c1*(dz1dt - (dz2dt + L*theta*cos(theta)/2)) + k1*(z1 - (z2 + L*theta*cos(theta)/2))) - L*(c1*(dz1dt - (dz3dt - L*theta*cos(theta)/2)) + k1*(z1 - (dz3dt - L*theta*cos(theta)/2))))/Iz;
% 计算左前轮垂直方向加速度
dz2dt = (k2*(f1 - z2) - k1*(z1 - (z2 + L*theta*cos(theta)/2)) - c1*(dz1dt - (dz2dt + L*theta*cos(theta)/2)))/m2;
% 计算右前轮垂直方向加速度
dz3dt = (k2*(f2 - z3) - k1*(z1 - (dz3dt - L*theta*cos(theta)/2)) - c1*(dz1dt - (dz3dt - L*theta*cos(theta)/2)))/m2;
sys = [dz1dt;dthetadt;dz2dt;dz3dt];
end
function sys=mdlOutputs(t,x,u)
% 输出车身垂直位移、俯仰角位移、左前轮垂直位移、右前轮垂直位移
sys = [x(1);x(2);x(3);x(4)];
end
function sys=mdlUpdate(t,x,u)
sys = [];
end
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 0.01;
sys = t + sampleTime;
end
function sys=mdlTerminate(t,x,u)
sys = [];
end在这段代码中,首先通过 mdlInitializeSizes 函数设置了模块的基本信息,如输入输出端口数量、状态变量个数等。mdlDerivatives 函数则是核心部分,它依据悬架的动力学方程,计算了各个状态变量(车身垂直位移、俯仰角位移、车轮垂直位移)的导数,这里假设了一些质量、刚度、阻尼等参数值来简化计算。mdlOutputs 函数负责输出我们所关心的状态变量值,而其他函数如 mdlUpdate、mdlGetTimeOfNextVarHit 和 mdlTerminate 则分别处理模块更新、采样时间以及结束等操作。
随机路面激励模型
路面激励是影响悬架性能的重要外部因素。实际路面不可能是完全平整的,因此需要建立随机路面激励模型来模拟真实路况。
基于功率谱密度(PSD)的模型
一种常用的方法是基于功率谱密度来生成随机路面激励。功率谱密度描述了路面不平度在不同空间频率下的分布情况。
代码示例与分析
% 定义路面不平度系数
A0 = 256e-6; % 参考空间频率下的路面不平度系数
n0 = 0.1; % 参考空间频率
% 车辆速度
v = 20; % m/s
% 采样时间间隔
dt = 0.01;
% 仿真时间
T = 10;
% 总采样点数
N = T/dt;
% 空间频率向量
n = (0:N - 1)/(N*dt*v);
% 功率谱密度计算
Sq = A0*n0^2./(n.^2 + n0^2);
% 生成随机相位
phi = 2*pi*rand(N,1);
% 逆傅里叶变换生成路面不平度时间序列
q = real(ifft(sqrt(2*Sq)*exp(1i*phi)));这段代码首先定义了路面不平度系数 A0 和参考空间频率 n0,以及车辆速度 v、采样时间间隔 dt 和仿真时间 T。通过这些参数计算出空间频率向量 n 和功率谱密度 Sq。然后生成随机相位 phi,最后通过逆傅里叶变换 ifft 将频域的功率谱密度转换为时域的路面不平度时间序列 q。这样我们就得到了一个随时间变化的随机路面激励信号,可以作为悬架模型的输入。
LMI 求解文件
线性矩阵不等式(LMI)在控制系统设计中是一种强大的工具,特别是在 H2/H 无穷控制问题中。通过将控制问题转化为 LMI 形式,可以利用成熟的 LMI 求解器来得到满足性能指标的控制器参数。
求解步骤与代码示例
在 MATLAB 中,可以使用 LMI 工具箱来求解相关问题。假设已经建立了悬架系统的状态空间模型 sys:
% 导入 LMI 工具箱
import slycot.lmitool.*
% 将系统转换为状态空间形式
[A,B,C,D] = ssdata(sys);
% 定义变量
n = size(A,1);
P = lmivar(1,[n 1]);
K = lmivar(2,[1 n]);
% 构建 LMI 约束
F = [];
% H2 性能指标相关约束
F = [F; lmiterm([1 1 1 P],A',1,'s'), lmiterm([1 1 1 K],B',1), lmiterm([1 2 1 0],C,1)];
F = [F; lmiterm([1 2 2 0],-eye(size(C,1)),1)];
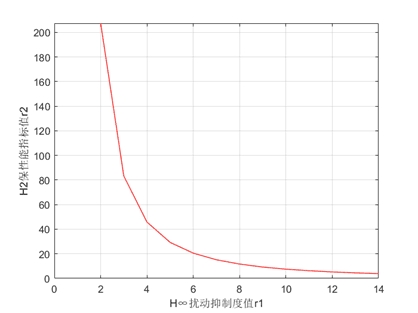
% H 无穷性能指标相关约束
gamma = 1; % 设定一个初始的 gamma 值
F = [F; lmiterm([2 1 1 P],A',1,'s'), lmiterm([2 1 1 K],B',1), lmiterm([2 1 2 0],0,1), lmiterm([2 2 2 0],-gamma^2*eye(size(D,2)),1)];
F = [F; lmiterm([2 1 3 P],0,1), lmiterm([2 3 3 P],-eye(n),1), lmiterm([2 3 2 0],D',1)];
% 求解 LMI
options = [];
[tmin,xfeas] = feasp(F,options);
% 提取控制器增益
K_value = dec2mat(xfeas,K);在这段代码中,首先导入了 LMI 工具箱,然后将悬架系统的状态空间模型分解为 A、B、C、D 矩阵。接着定义了变量 P 和 K,P 用于求解 Riccati 方程相关,K 就是我们要得到的控制器增益矩阵。通过 lmiterm 函数构建了与 H2 和 H 无穷性能指标相关的 LMI 约束。最后使用 feasp 函数求解 LMI,得到可行解 xfeas,并从中提取出控制器增益 K_value。
总结与赠送福利
通过 s 函数搭建悬架模型、随机路面激励模型以及利用 LMI 求解文件,我们对 H2/H 无穷半车悬架控制有了更深入的实践探索。希望大家能从这些内容中获取到有用的知识,用于自己的研究或项目中。为了方便大家进一步学习,我准备了详细的 word 详解文件,里面会对上述内容进行更细致的推导和讲解,大家有需要可以私信我获取。让我们一起在汽车悬架控制这个有趣的领域不断探索前进!
H2/H无穷半车悬架控制-4自由度悬架:s函数搭建悬架模型、随机路面激励模型、LMI求解文件。 赠送word详解文件

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 4
4 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)