基于LMI的悬架控制:探秘s函数悬架模型与LMI求解文件
基于LMI的悬架控制:s函数悬架模型、LIM求解文件。 赠相关参考文献
在汽车工程领域,悬架系统的性能对车辆的舒适性和操控稳定性起着关键作用。基于线性矩阵不等式(LMI)的悬架控制方法近年来备受关注,它为优化悬架性能提供了一种强大的途径。今天咱们就来深入聊聊与之紧密相关的s函数悬架模型以及LMI求解文件。
s函数悬架模型
s函数在Simulink环境中是一个非常有用的工具,它允许用户以一种灵活的方式自定义动态系统模型。对于悬架模型而言,s函数能够精确地描述悬架系统各个部件之间的复杂动力学关系。
先来看一段简单的s函数框架代码示例(以MATLAB语言为例):
function [sys,x0,str,ts] = suspension_sfun(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end在这段代码中,suspension_sfun是函数名,t代表时间,x是状态变量,u为输入变量,flag则是一个标识,用于指示Simulink当前要执行的操作。
mdlInitializeSizes函数主要用于初始化模型的参数,例如定义状态变量的个数、输入输出端口的数量等。比如我们要设置一个简单双质量悬架模型的状态变量个数,可能就会在这个函数里进行如下操作:
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 4; % 假设双质量模型有4个连续状态变量
sizes.NumDiscStates = 0;
sizes.NumOutputs = 2; % 定义两个输出,比如车身位移和车轮位移
sizes.NumInputs = 2; % 假设两个输入,比如路面激励和控制输入
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [0;0;0;0]; % 初始状态设为0
str = [];
ts = [0 0];mdlDerivatives函数用于计算状态变量的导数,这对于描述悬架系统的动力学特性至关重要。以简单的线性悬架动力学方程为例,可能会有类似这样的计算:
function sys=mdlDerivatives(t,x,u)
m1 = 1000; % 车身质量
m2 = 100; % 车轮质量
k1 = 20000; % 悬架弹簧刚度
k2 = 200000; % 轮胎刚度
c1 = 1000; % 悬架阻尼系数
% 路面激励假设为u(1),控制输入假设为u(2)
sys(1) = x(3); % 车身位移导数是车身速度
sys(2) = x(4); % 车轮位移导数是车轮速度
sys(3) = (-k1*(x(1)-x(2)) - c1*(x(3)-x(4)) + u(2))/m1; % 车身加速度
sys(4) = (k1*(x(1)-x(2)) + c1*(x(3)-x(4)) - k2*(x(2)-u(1)))/m2; % 车轮加速度mdlOutputs函数则负责根据当前的状态变量和输入计算模型的输出,比如返回车身和车轮的位移信息。
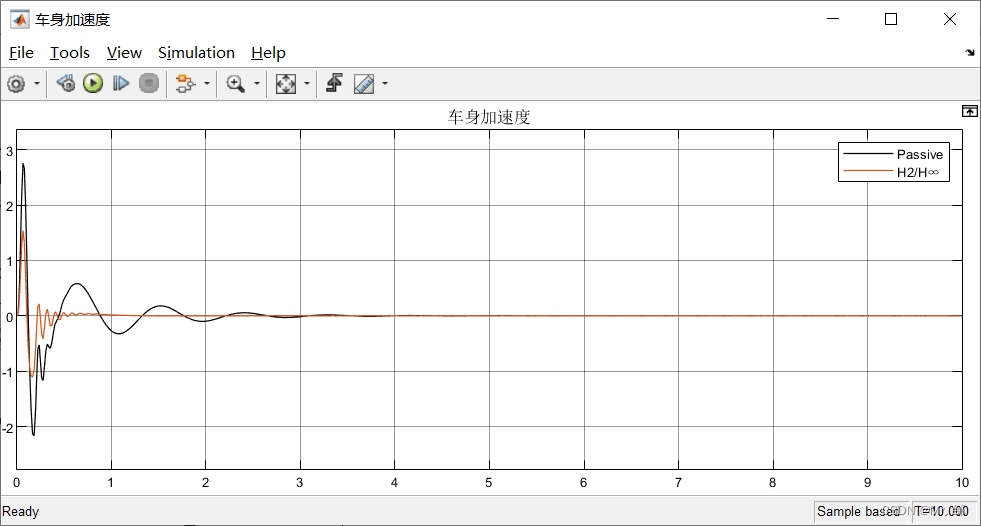
通过这样的s函数构建的悬架模型,我们可以在Simulink中方便地进行各种工况下的仿真分析,为后续基于LMI的控制算法设计提供基础。
LMI求解文件
线性矩阵不等式(LMI)是一种强大的优化工具,在悬架控制中,它可以用于设计控制器以满足诸如稳定性、性能指标等各种要求。LMI求解文件则是实现这些优化计算的关键。
基于LMI的悬架控制:s函数悬架模型、LIM求解文件。 赠相关参考文献
在MATLAB中,我们可以使用LMI工具箱来处理LMI问题。以下是一个简单的示例,展示如何使用LMI工具箱来求解一个基于LMI的悬架控制器设计问题:
% 定义系统矩阵
A = [0 1 0 0; -k1/m1 -c1/m1 k1/m1 c1/m1; 0 0 0 1; k1/m2 c1/m2 -k1/m2 -c1/m2 -k2/m2];
B = [0; 1/m1; 0; -1/m2];
C = [1 0 0 0; 0 0 1 0];
% 定义LMI变量
P = lmivar(1,[4 1]); % 正定矩阵P
F = lmivar(2,[1 4]); % 反馈增益矩阵F
% 构建LMI
lmiterm([1 1 1 P],A,1,'s');
lmiterm([1 1 1 P],B*F,1);
lmiterm([1 1 2 F],-1,1);
lmiterm([2 1 1 P],-1,1);
% 求解LMI
[tmin,xfeas]=feasp;
% 获取反馈增益
K = dec2mat(xfeas,F);在这段代码中,首先定义了悬架系统的状态空间模型矩阵A、B和C,这些矩阵描述了悬架系统的动力学特性。然后,使用lmivar函数定义了LMI变量,P是一个正定矩阵,它通常与系统的稳定性相关联,F则是我们要设计的反馈增益矩阵。
通过lmiterm函数构建了具体的LMI约束条件。这里面的操作其实就是将我们基于控制理论的一些要求转化为LMI的形式。比如第一个lmiterm语句lmiterm([1 1 1 P],A,1,'s'),它构建了一个与系统稳定性相关的LMI条件,具体来说就是$A^TP + PA + (BF)^TP + PBF < 0$(这里的符号's'表示对称矩阵的另一半会自动补齐)。
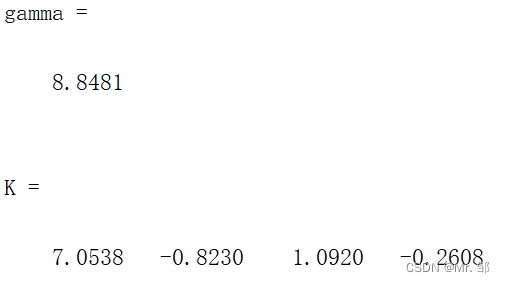
最后使用feasp函数求解这个LMI问题,得到满足条件的解,进而提取出反馈增益矩阵K,这个增益矩阵就可以用于实际的悬架控制器设计,使得悬架系统满足我们预先设定的性能指标。
相关参考文献
- 《汽车动力学及其控制》:这本书详细介绍了汽车悬架系统的动力学原理以及各种控制方法的理论基础,对于理解悬架系统和基于LMI控制的背景知识非常有帮助。
- 《Linear Matrix Inequalities in System and Control Theory》:经典的LMI理论书籍,深入讲解了LMI的数学原理、求解方法以及在系统与控制领域的广泛应用,对于深入研究基于LMI的悬架控制算法有很大的指导意义。
希望通过以上对s函数悬架模型和LMI求解文件的介绍,能让大家对基于LMI的悬架控制有更清晰的认识,在相关研究和实践中有所帮助。欢迎大家一起交流探讨。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献168条内容
已为社区贡献168条内容

所有评论(0)