永磁同步电机电流内环PR控制的Simulink仿真探秘
永磁同步电机电流内环PR控制Matlab/simulink仿真模型,参数已设置好,可直接运行。 属于PMSM转速电流双闭环矢量控制系统模型。 电流内环采用PR控制器,不需要旋转坐标变换,在静止坐标下进行矢量控制,转速外环采用PI控制器。 波形完美,包含原理说明文档和参考文献。
最近在研究永磁同步电机(PMSM)控制,给大家分享一个超实用的 PMSM 转速电流双闭环矢量控制系统的 Matlab/Simulink 仿真模型,特别是电流内环采用 PR 控制的版本。
模型概述
这个模型参数都已经设置妥当,拿到手就能直接运行,相当方便。它属于 PMSM 转速电流双闭环矢量控制系统,转速外环用的是经典的 PI 控制器,而电流内环则采用 PR 控制器。这里的 PR 控制器可不一般,它不需要进行旋转坐标变换,直接在静止坐标下就能实现矢量控制,这就大大简化了控制算法的复杂度。
电流内环 PR 控制器原理
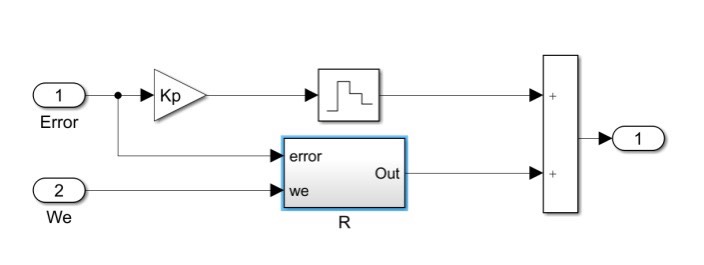
PR 控制器,也就是比例谐振控制器,其传递函数一般可以写成:
% 假设kp为比例系数,kr为谐振系数,wc为截止频率,w0为谐振频率
kp = 0.5;
kr = 10;
wc = 100;
w0 = 314; % 对应50Hz
num = [kp*wc^2+kr, 0, kr*w0^2];
den = [1, wc, w0^2];
PR_controller = tf(num, den);这段 Matlab 代码构建了一个简单的 PR 控制器传递函数模型。这里 kp 是比例系数,它主要影响系统的快速响应性,数值越大,系统对误差的响应就越快。kr 是谐振系数,它决定了控制器对特定频率信号的增益,在永磁同步电机控制中,我们希望它对电机的基波频率(比如常见的 50Hz 或 60Hz)有很高的增益,从而能很好地跟踪和控制该频率下的电流。wc 是截止频率,它类似于一个“门槛”,控制着控制器对不同频率信号的作用范围。w0 就是我们期望跟踪的谐振频率,比如这里设置为 314rad/s,对应 50Hz 的市电频率。
永磁同步电机电流内环PR控制Matlab/simulink仿真模型,参数已设置好,可直接运行。 属于PMSM转速电流双闭环矢量控制系统模型。 电流内环采用PR控制器,不需要旋转坐标变换,在静止坐标下进行矢量控制,转速外环采用PI控制器。 波形完美,包含原理说明文档和参考文献。
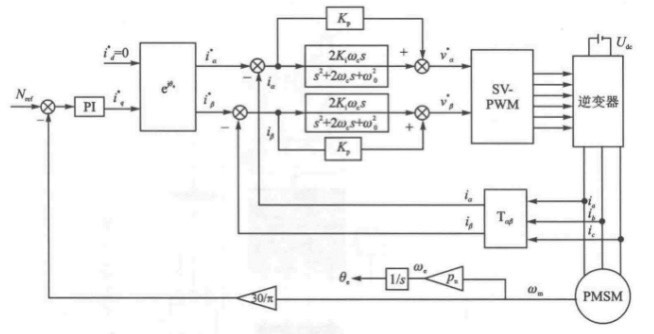
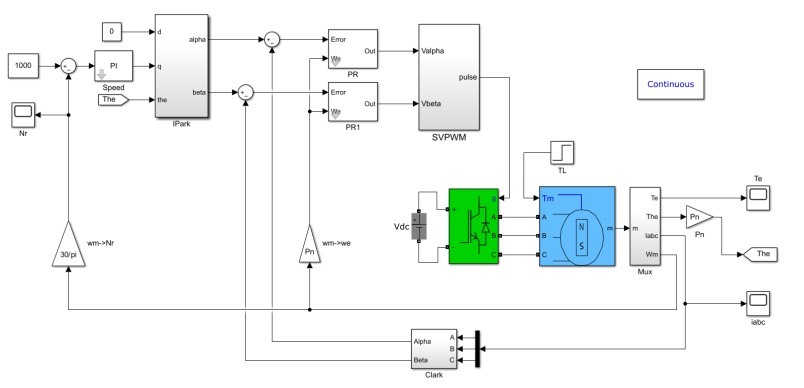
在 Simulink 模型中,电流内环采用 PR 控制器,直接在静止的 $\alpha - \beta$ 坐标系下对电流进行控制。相比于传统的在旋转 $d - q$ 坐标系下的控制方法,它避免了复杂的坐标变换计算,不仅减少了计算量,还提高了系统的实时性和稳定性。
转速外环 PI 控制器
转速外环采用经典的 PI 控制器,其传递函数为:
% 假设kp_speed为转速环比例系数,ki_speed为转速环积分系数
kp_speed = 0.1;
ki_speed = 1;
num_speed = [kp_speed, ki_speed];
den_speed = [1, 0];
PI_speed_controller = tf(num_speed, den_speed);这里 kpspeed 控制着转速环对转速误差的快速响应能力,kispeed 则用于消除稳态误差。通过合理调整这两个参数,可以让电机的转速快速、稳定地跟踪给定值。
仿真波形
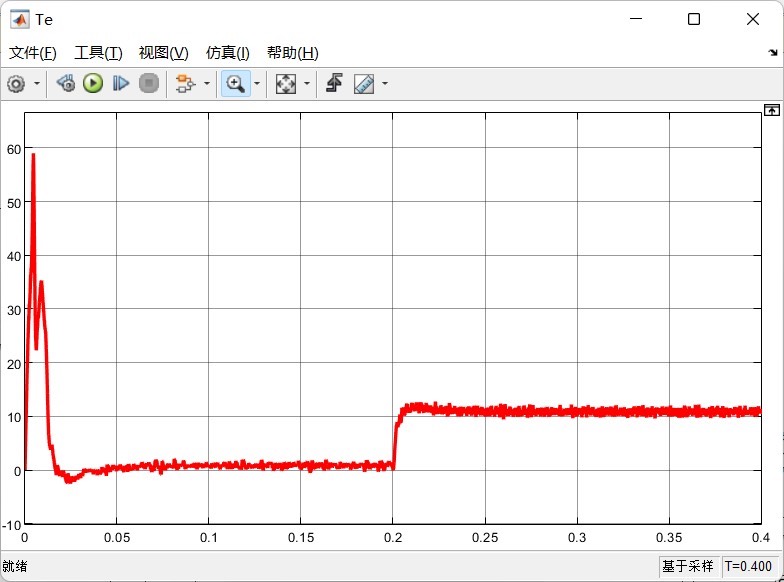
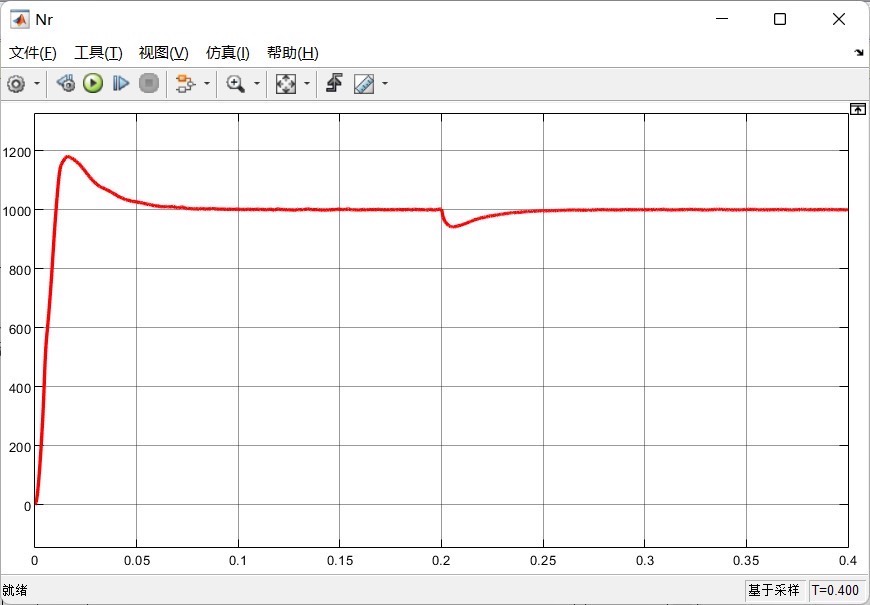
运行这个仿真模型,得到的波形非常完美。从电流波形可以清晰看到,电流内环的 PR 控制器能够很好地跟踪电流指令,在各种工况下都能保持稳定的输出。转速波形也能快速、平滑地达到给定转速,并在负载变化等情况下保持稳定。
资料完备性
这个模型还贴心地配备了原理说明文档和参考文献。原理说明文档详细阐述了 PMSM 的工作原理、双闭环控制策略以及 PR 控制器和 PI 控制器的设计思路,即使是对这块知识不太熟悉的朋友,也能通过文档快速上手理解。参考文献则为进一步深入研究提供了方向,方便大家拓展知识面。
总之,这个永磁同步电机电流内环 PR 控制的 Matlab/Simulink 仿真模型,无论是对于学习 PMSM 控制的新手,还是需要进行相关研究和项目开发的工程师,都是一个不可多得的好资源,强烈推荐大家下载运行研究一番。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 4
4 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)