牵引车与半挂车三自由度动力学模型探索
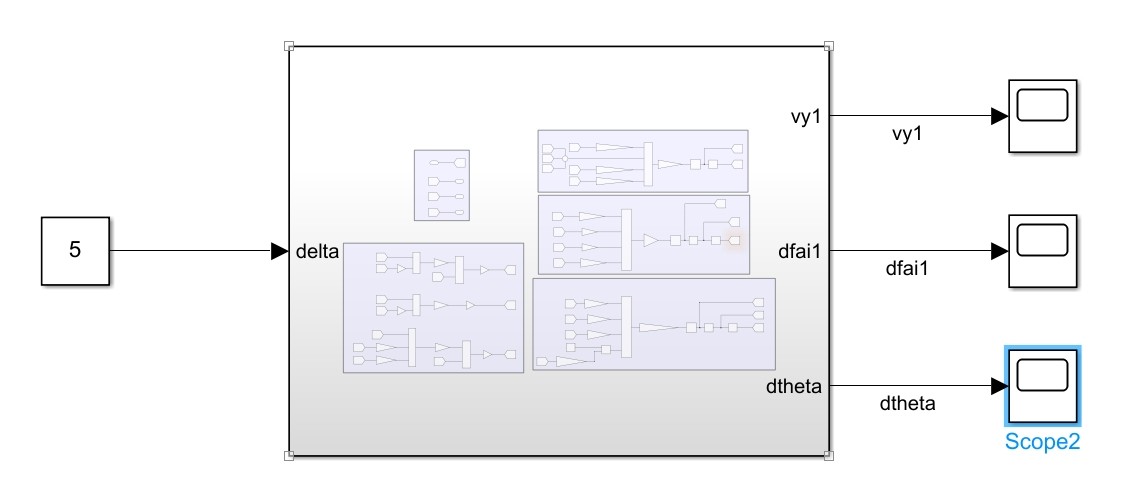
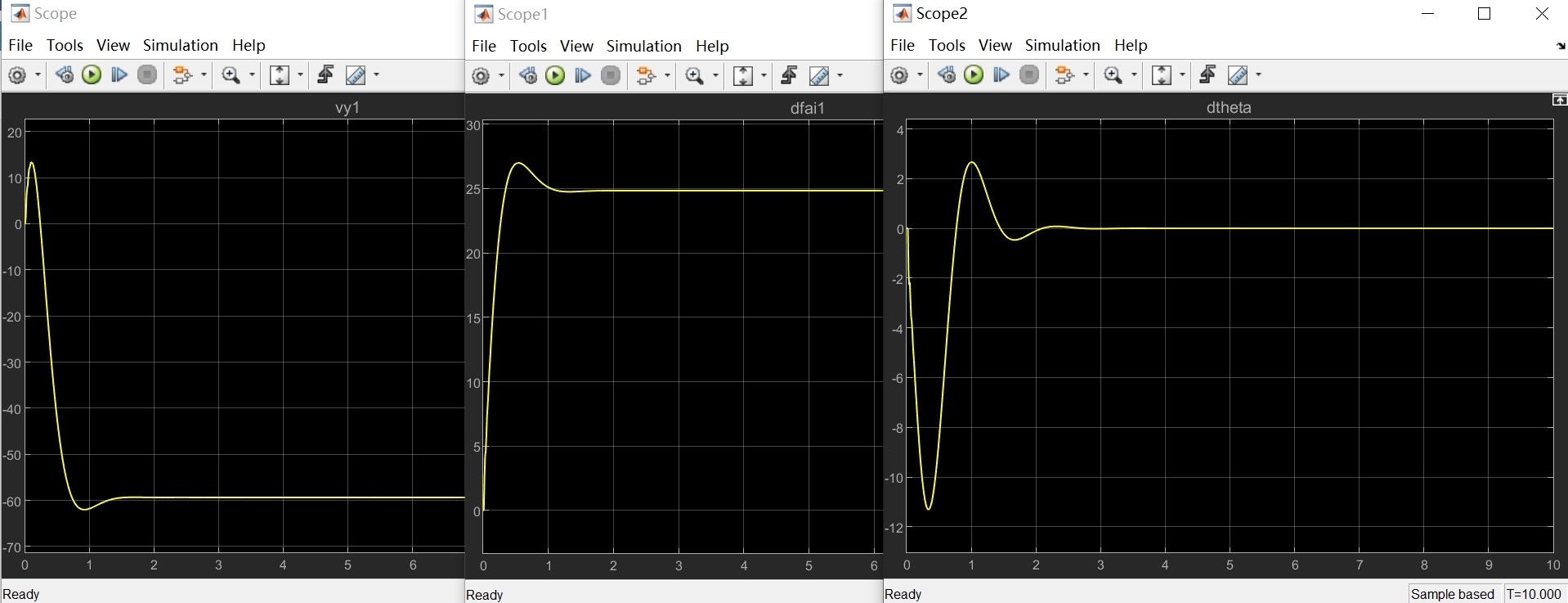
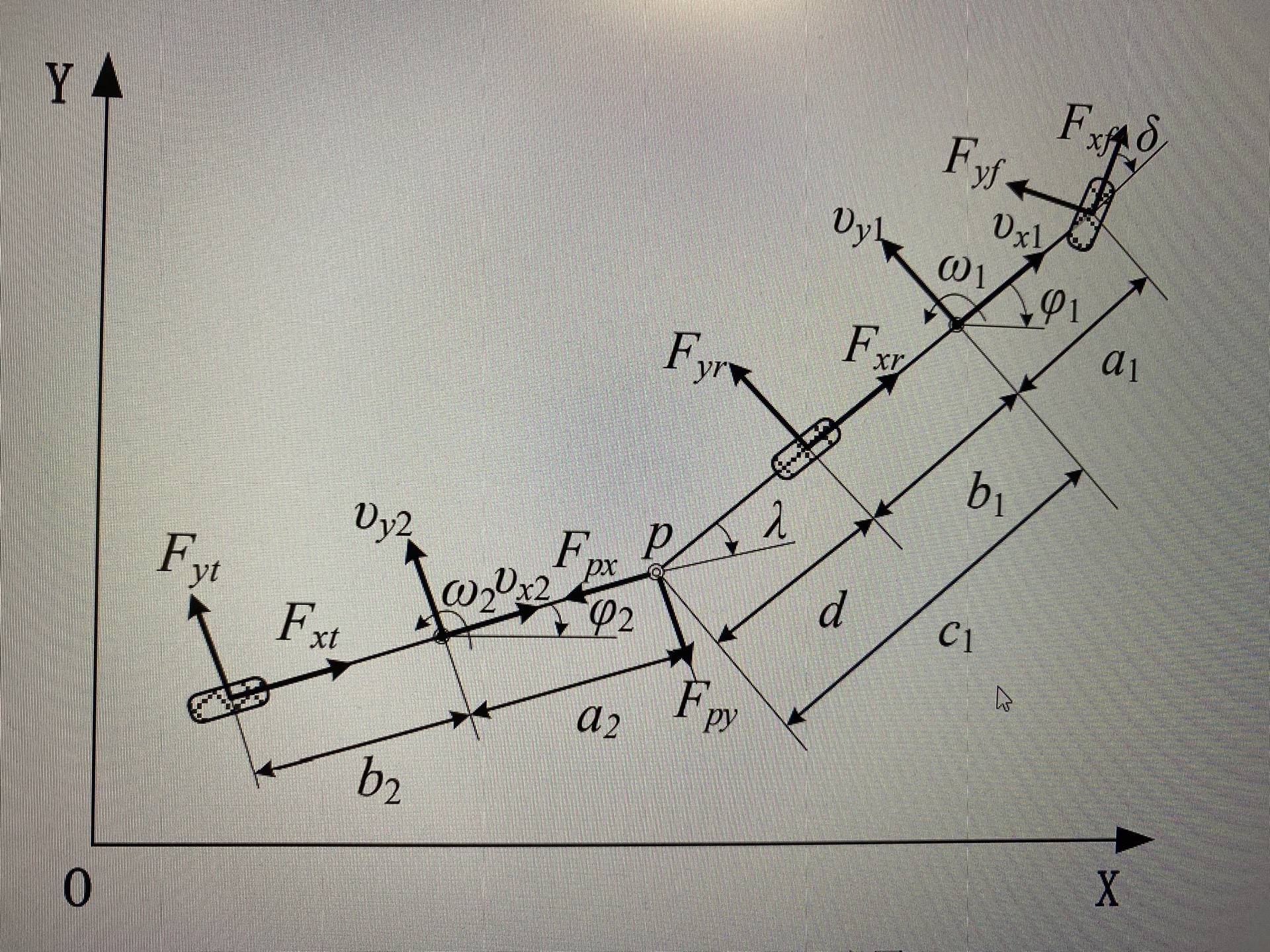
牵引车+半挂车三自由度动力学模型 自由度包括:牵引车侧向运动,牵引车及挂车横摆运动 图为仿真效果,模型有说明文档
说到车辆动力学模型,尤其是牵引车和半挂车的组合,可能会让人觉得这是一个复杂的话题。但其实,只要把它分解开来,一步一步地分析,就能发现其中的规律和趣味。最近我在研究一个三自由度的动力学模型,想和大家分享一下我的思考过程,以及代码实现的一些小细节。
模型背景
牵引车和半挂车组成的车辆系统,在道路上行驶时,其运动状态远比单一车辆复杂。尤其是当牵引车和挂车同时发生侧向运动和横摆运动时,两者的相互作用会对整体稳定性产生显著影响。因此,建立一个能够描述这种运动的模型就显得尤为重要。
这个模型包含三个自由度:
- 牵引车的侧向运动(Lateral Motion of Trailer)。
- 牵引车的横摆运动(Yaw Motion of Trailer)。
- 半挂车的横摆运动(Yaw Motion of Semi-trailor)。
听起来是不是有点抽象?没关系,接下来我会用代码和仿真效果来帮助理解。
模型的建立
首先,我们需要明确各个自由度对应的物理量。侧向运动可以用侧向位移 \( y \) 来表示,而横摆运动则用横摆角速度 \( r \) 来表示。不过,因为模型中有牵引车和挂车两部分,我需要分别定义牵引车的横摆角速度 \( rt \) 和挂车的横摆角速度 \( rs \)。
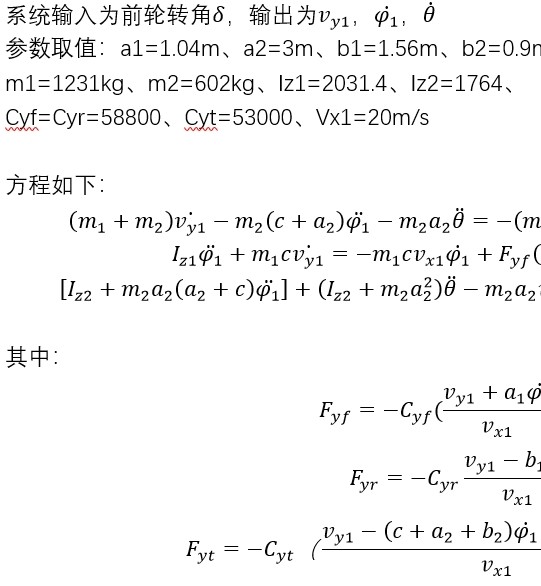
这样,整个系统的状态空间方程可以写成一个三阶的状态向量:
\[
\mathbf{x} = \begin{bmatrix}
y \\
牵引车+半挂车三自由度动力学模型 自由度包括:牵引车侧向运动,牵引车及挂车横摆运动 图为仿真效果,模型有说明文档
\dot{y} \\
rt - rs
\end{bmatrix}
\]
这看起来是不是有点复杂?没关系,我们一步一步来推导。
代码实现中的状态空间方程
为了方便,我打算用Python来实现这个模型。首先,需要定义各个参数,比如牵引车和挂车的质量、转动惯量、轴距等等。假设我们已经有了一份说明文档,里面详细列出了所有参数的定义和单位。
# 参数定义
m_t = 3000 # 牵引车质量 (kg)
m_s = 2000 # 挂车质量 (kg)
J_t = 5000 # 牵引车转动惯量 (kg·m²)
J_s = 3500 # 挂车转动惯量 (kg·m²)
a = 1.5 # 牵引车前轴到质心的距离 (m)
b = 2.0 # 牵引车后轴到质心的距离 (m)
l = 12.0 # 牵引车和挂车之间的连接杆长度 (m)
g = 9.81 # 重力加速度 (m/s²)
# 状态空间方程的系数矩阵
def state_equation(x, u, t):
y, y_dot, d_r = x
delta, tau = u
# 计算各力和力矩
lateral_force = ... # 这里需要根据具体模型计算侧向力
yaw_moment_t = ... # 计算牵引车的横摆力矩
yaw_moment_s = ... # 计算挂车的横摆力矩
dydt = [y_dot,
lateral_force/(m_t + m_s),
(yaw_moment_t - yaw_moment_s)/(J_t + J_s)]
return dydt这段代码其实是一个动态模型的框架,具体的计算需要根据力和力矩的表达式进一步完善。不过,这里已经可以看到模型的基本结构。
自由度的意义
接下来,分析一下每个自由度的意义。牵引车的侧向运动 \( y \) 表示了车辆在道路上的左右偏移,这与驾驶员的操作(如方向盘的转动)密切相关。而牵引车和挂车的横摆运动,则描述了车辆在行驶过程中的旋转状态。
想象一下,当你在高速公路上驾驶一辆牵引车,如果后面拖着一个挂车,当你突然转动方向盘时,牵引车和挂车的反应是不是会有差异?这就是我们模型中 \( rt \) 和 \( rs \) 的差异所在。
调整与优化
在建模过程中,参数的选取和调整非常重要。比如,连接杆长度 \( l \) 对系统稳定性的影响,就是一个值得探讨的问题。过长的连接杆可能增加系统的不稳定性,而过短的连接杆又可能无法充分发挥挂车的跟随性能。
# 不同连接杆长度下的仿真
def simulate_vehicles(l_values):
for l in l_values:
x0 = [0, 0, 0] # 初始状态
u = [delta(t), tau(t)] # 输入控制
sol = solve_ivp(state_equation, t_span, x0, args=(u,))
plot(sol.t, sol.y[0], label=f'l = {l} m')
plt.legend()
plt.show()从这段代码中,我们可以看到,通过调整连接杆长度 \( l \),能够明显地影响系统的动态行为。这也说明了在实际应用中,合理的设计和参数匹配是多么重要。
仿真效果
为了让模型更加直观,我们进行了一些仿真。以下是牵引车和挂车在不同方向盘转角下的侧向运动响应:
# 仿真输入:方向盘转角
def delta(t):
if t < 2:
return 0
else:
return 0.1 # 转向角为0.1弧度
# 仿真并绘制结果
simulate_vehicles([12.0, 15.0, 18.0])仿真结果表明,随着连接杆长度的增加,系统的侧向响应变得更加平缓。这为我们优化车辆的设计提供了重要的参考。
总结
通过这次对三自由度动力学模型的研究,不仅加深了我对车辆动力学的理解,也让我意识到,即使是复杂的系统,只要将其拆解开来,逐步分析,最终都能够找到解决问题的方法。
如果你对这个模型感兴趣,不妨自己动手尝试,调整不同的参数,看看会对系统的行为产生什么样的影响。也许你会在这个过程中发现更多有趣的现象!
这就是我的一些思考和代码实现的分享,希望能够对你有所帮助。如果你有任何问题或建议,欢迎随时交流!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 4
4 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)