CUDA graph 简析
1. CUDA Graph 是什么?
CUDA Graph 是 NVIDIA CUDA 中的一个重要功能,用于优化 GPU 任务的调度和执行效率。它的核心思想是将一系列 GPU 操作(如内核启动、内存拷贝等)预先记录成一个静态的“执行图”,然后一次性提交整个图到 GPU 执行,从而减少 CPU 与 GPU 之间的交互开销(降低 API 调用和同步的开销),提升性能(尤其适合重复执行的固定模式任务)。
构成CUDA图的节点是任意异步CUDA操作,可被 graphs 的的操作(graphs 节点):
- Kernel Launch:CUDA kernel running on GPU(GPU CUDA 操作)
- CPU Function Call:Callback function on CPU(CPU 操作)
- Memcopy / Memset:GPU data management(GPU 数据传输)
- Memory Alloc / Free:Inline memory allocation(内存分配)
- Sub-Graph:Graphs are hierarchical(子图 Graphs)
2. CUDA Graph 发展历程
2017 年:CUDA 9.0 引入基础 CUDA Graphs
- 核心特性 :首次提出 “计算图” 概念,允许将一系列 CUDA 操作(核函数、内存复制、同步等)定义为一个静态图结构
- 功能局限:
- 仅支持完全静态的图(结构和参数在构建后不可修改)
- 图的执行依赖主机端启动,且不支持动态分支或条件执行
- 价值:通过 “一次构建、多次启动” 减少核函数启动的 CPU 开销(避免重复的参数传递和调度指令),适用于固定流程的重复计算(如深度学习推理)
2018 年:CUDA 10.0 增强图的可修改性
- 核心改进:允许对已创建的图进行有限修改,如更新核函数参数、替换部分节点(cudaGraphUpdateNodeParams 等 API)
- 局限:
- 修改后需重新实例化(cudaGraphInstantiate),开销较大
- 仍不支持动态分支,图的整体结构需固定
- 价值:一定程度上提升了静态图的灵活性,适合参数需动态调整但流程固定的场景(如迭代计算中更新输入数据)
2020 年:CUDA 11.0 引入 Graph Segment Table
- 核心突破:支持将大图拆分为多个独立 “图段(Segment)”,通过表格管理段间跳转关系,实现设备端动态分支
- 关键能力:
- 运行时可根据条件在设备端直接切换图段,无需主机端介入
- 图段修改后无需重新构建整个图,仅需更新对应段
- 价值:首次解决了静态图的动态控制流问题,兼顾低启动开销与分支灵活性,适用于需要动态调整路径的场景
2021 年:CUDA 11.4 引入图编译器(Graph Compiler)
- 核心优化:在图实例化阶段加入全局优化模块,自动对图结构进行深度优化
- 关键功能:
- 全局指令重排(合并内存操作、平衡计算与内存密集型任务)
- 自动分片超大规模图,实现设备端并行调度
- 优化 Graph Segment Table 的段间切换效率
- 价值:大幅提升复杂图的执行效率,尤其对包含数百个节点的大图,性能提升可达 10%-30%
2022 年:CUDA 12.0 增强动态图与硬件协同
- 核心改进:
- 扩展 Graph Segment Table 支持多输入 / 多输出分支,适配更复杂的动态逻辑
- 与新 GPU 架构(如 Hopper)的异步拷贝、线程块调度特性深度集成
- 优化图的序列化 / 反序列化,支持跨进程图复用
- 价值:进一步缩小动态图与静态图的性能差距,同时提升大图的可移植性
2023 年至今:持续优化生态适配
- 核心方向:
- 与深度学习框架(PyTorch、TensorFlow)更紧密集成,简化动态图的构建接口
- 增强对稀疏图、异构计算(CPU+GPU)的支持
- 提供更详细的图性能分析工具(如 NSight 中的 Graph Profiler)
- 价值:降低开发者使用门槛,推动计算图在更多领域的普及(如科学计算、自动驾驶)
演进主线总结
- 静态图阶段(2017-2019):解决 “重复启动开销” 问题,支持固定流程的高效执行
- 动态图突破(2020):通过 Graph Segment Table 实现设备端动态分支,解决灵活性问题
- 深度优化阶段(2021 - 至今):引入图编译器并持续硬件协同,提升复杂图的性能与易用性
3. 为什么需要 CUDA Graph?
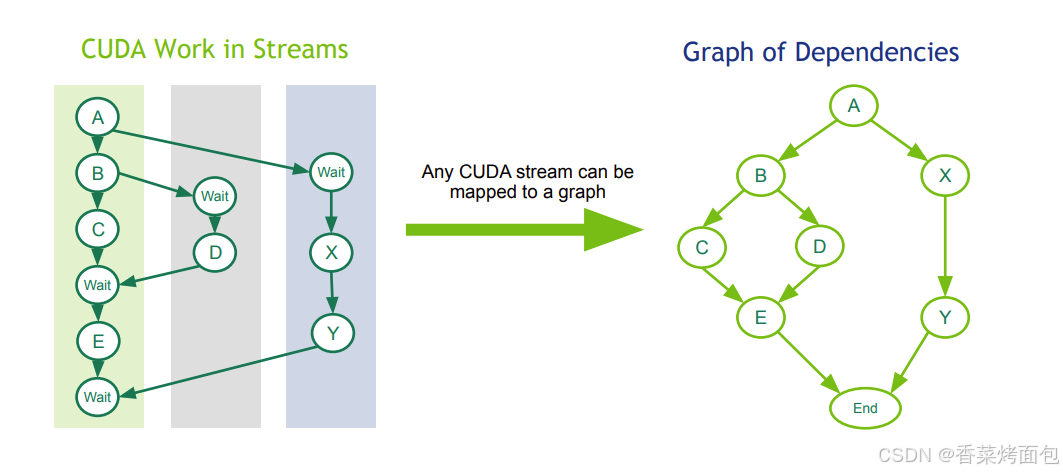
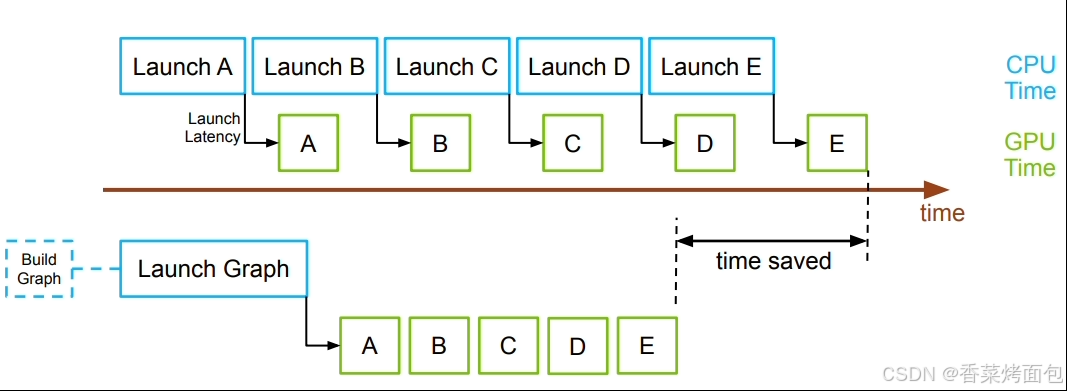
在传统的 CUDA 流(Stream)模型中,每个操作(如内核启动、内存拷贝)需要逐个提交到流中,GPU 驱动程序需要逐个处理这些请求。当存在大量小任务时,CPU 与 GPU 之间的通信开销会显著增加。CUDA Graph 通过预录制执行序列,将多个操作合并为一个整体提交。
Graph Launch 一次性提交所有工作,降低 CPU 开销(减少 CPU 调度开销、避免多次启动内核的延迟、提高 GPU 利用率):
示例:用 CUDA Graph 加速向量加法
-
传统流模式:每次循环需要约 5μs 的 CPU 调度开销,100 次循环总开销约 500μs
#include <cstdio>
#include <cuda_runtime.h>
__global__ void vectorAdd(float* A, float* B, float* C, int N) {
int i = blockIdx.x * blockDim.x + threadIdx.x;
if (i < N) C[i] = A[i] + B[i];
}
int main() {
const int N = 1 << 20; // 1M 元素
float *A, *B, *C;
cudaMalloc(&A, N * sizeof(float));
cudaMalloc(&B, N * sizeof(float));
cudaMalloc(&C, N * sizeof(float));
// 执行 100 次向量加法
for (int i = 0; i < 100; i++) {
dim3 block(256);
dim3 grid((N + block.x - 1) / block.x);
vectorAdd<<<grid, block>>>(A, B, C, N);
cudaDeviceSynchronize(); // 同步等待完成
}
cudaFree(A);
cudaFree(B);
cudaFree(C);
return 0;
}-
CUDA Graph 模式:首次录制图需要约 50μs,后续每次循环仅需 0.5μs,总开销约 50 + 100*0.5 = 100μs,性能提升约 5倍
#include <cstdio>
#include <cuda_runtime.h>
__global__ void vectorAdd(float* A, float* B, float* C, int N) {
int i = blockIdx.x * blockDim.x + threadIdx.x;
if (i < N) C[i] = A[i] + B[i];
}
int main() {
const int N = 1 << 20; // 1M 元素
float *A, *B, *C;
cudaMalloc(&A, N * sizeof(float));
cudaMalloc(&B, N * sizeof(float));
cudaMalloc(&C, N * sizeof(float));
// 创建 CUDA 流和事件
cudaStream_t stream;
cudaStreamCreate(&stream);
// 1. 创建并记录 CUDA Graph
cudaGraph_t graph;
cudaGraphExec_t instance;
cudaStreamBeginCapture(stream, cudaStreamCaptureModeGlobal); // 开始录制
// 录制内核启动操作
dim3 block(256);
dim3 grid((N + block.x - 1) / block.x);
vectorAdd<<<grid, block, 0, stream>>>(A, B, C, N);
cudaStreamEndCapture(stream, &graph); // 结束录制
cudaGraphInstantiate(&instance, graph, NULL, NULL, 0); // 实例化图
// 2. 执行图(替代传统循环)
for (int i = 0; i < 100; i++) {
cudaGraphLaunch(instance, stream); // 提交整个图执行
cudaStreamSynchronize(stream);
}
// 释放资源
cudaGraphDestroy(graph);
cudaGraphExecDestroy(instance);
cudaStreamDestroy(stream);
cudaFree(A);
cudaFree(B);
cudaFree(C);
return 0;
}
3. CUDA Graph 工作流程
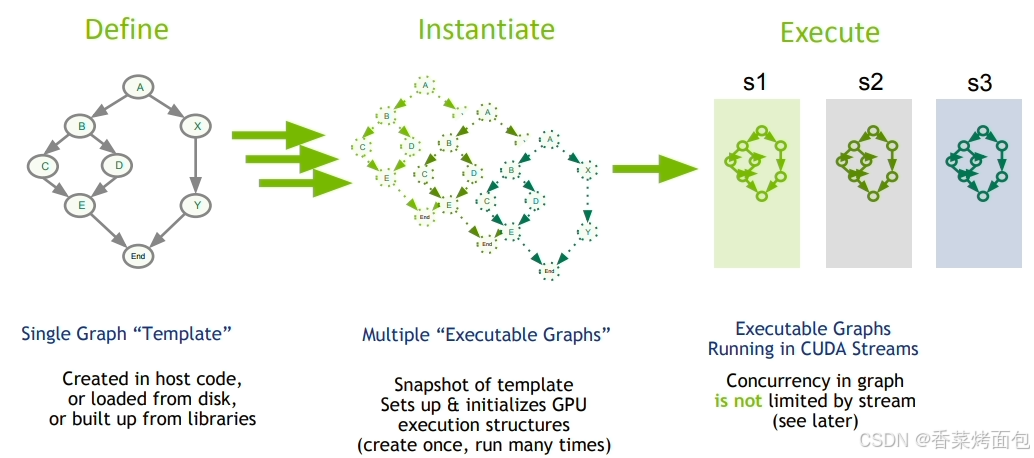
- 定义阶段:定义 CUDA 图的结构、内容,告诉 CUDA 节点、参数、依赖关系,目标GPU是哪个,要启动到哪个流
- 实例化阶段:获取CUDA Graph的模板,并执行配置和初始化从而节省启动时所需要执行的操作,生成的CUDA Graph实例即为可执行图形
- 执行阶段:实例化后的CUDA Graph可以被直接部署到CUDA Stream当中(类似于一个kernel函数)可以重复启动无需多次实例化
示例:
1. 创建CUDA Graph
//创建CUDA Graph
cudaGraphCreate(&graph, 0);
//定义需要的CUDA Graph节点
cudaGraphAddKernelNode(&a, graph, NULL, 0, &nodeParams);
cudaGraphAddKernelNode(&b, graph, NULL, 0, &nodeParams);
cudaGraphAddKernelNode(&c, graph, NULL, 0, &nodeParams);
cudaGraphAddKernelNode(&d, graph, NULL, 0, &nodeParams);
// 定义上一步中CUDA节点之间的连接边
cudaGraphAddDependencies(graph, &a, &b, 1); // A->B
cudaGraphAddDependencies(graph, &a, &c, 1); // A->C
cudaGraphAddDependencies(graph, &b, &d, 1); // B->D
cudaGraphAddDependencies(graph, &c, &d, 1); // C->D2. 对执行的CUDA Stream进行捕获——核心API:cudaStreamBeginCapture() 与cudaStreamEndCapture() 控制捕获开始与结束
cudaGraph_t graph;
//开始捕捉
cudaStreamBeginCapture(stream);
//CUDA Stream中执行kernel函数
kernel_A<<< ..., stream >>>(...);
kernel_B<<< ..., stream >>>(...);
libraryCall(stream);
kernel_C<<< ..., stream >>>(...);
//CUDA Stream运行完成后停止捕获,得到一个CUDA Graph
cudaStreamEndCapture(stream, &graph);捕获CUDA Stream时,CUDA Stream中的kernenl函数或其他操作不会被enqueue到队列中排队等待执行,而是直接被构建到CUDA Graph中,随后通过cudaStreamEndCapture 结束捕获并得到CUDA Graph。
4. CUDA Graph如何提升大模型推理性能
在对延迟极度敏感的大语言模型推理场景中,GPU的强大算力常被CPU的控制开销所限制。
可以将传统架构,比喻为一个“急性子的主厨(CPU)”与“一群技艺精湛但绝对服从的帮厨(GPU流多处理器SMs)”的厨房。
- 主厨 (CPU):负责阅读菜谱(执行推理代码),并将每一个烹饪步骤(如矩阵乘法、激活函数等)拆解成独立的指令,然后逐条下达。
- 帮厨 (GPU):拥有海量并行处理能力,能瞬间完成任何单一指令(执行一个CUDA Kernel),但完成一步后,必须停下,等待主厨的下一道命令。
这个流程是严格的命令式(Imperative):主厨每喊一个指令,帮厨们就迅速完成,然后集体“立正”,等待主'厨的下一个指令。对于一次包含数千个操作的复杂LLM推理,主厨需要不间断地下达数千个指令。问题在于,主厨下达指令本身需要时间,这个时间,就是所谓的控制开销(Control Overhead)。
CPU的控制开销主要来源于四个方面:
- 内核启动延迟 (Kernel Launch Latency):CPU通过CUDA驱动向GPU发起一次Kernel启动,这个过程本身就存在微秒级的固定延迟。对于LLM中海量的小型Kernel(如逐元素加法、激活函数),所有启动延迟累加起来,甚至可能超过Kernel的实际执行时间。
- CUDA API调用开销:除了启动Kernel,每一次内存操作(cudaMalloc, cudaMemcpy)、同步(cudaStreamSynchronize)等API调用,都伴随着CPU与GPU驱动间的上下文切换和验证,这些看似不起眼的操作,积少成多,构成了显著的开销。
- CPU调度抖动 (Jitter):CPU作为通用处理器,其上的推理线程会不可避免地受到操作系统(OS)调度的影响。任何微小的中断或上下文切换,都会打乱向GPU发送指令的节奏,引入不确定的延迟“毛刺”。
- 动态性带来的重复开销:对于每一次新的推理请求,CPU都需要重复地执行几乎完全相同的逻辑判断、参数计算和Kernel启动序列。这在架构上,是一种巨大的冗余浪费。
在训练阶段,较大的批次(Batch Size)和计算密度可以摊销这些微秒级的开销。但在要求低延迟的在线推理服务中(Batch Size通常为1),这些开销被无限放大,CPU成为了那个发号施令最慢的环节,导致GPU宝贵的计算核心被大量浪费在空闲等待中。
CUDA Graph将GPU的执行模型,从依赖CPU实时指挥的“命令式”,转变为一次性定义、可重复执行的声明式(Declarative)模型。
阶段一:捕获(Capture)—— 绘制静态执行图
在此阶段,CPU依然像往常一样,按顺序执行一次完整的推理计算流。CUDA驱动此时将CPU发出的所有CUDA相关操作(Kernel启动、内存拷贝、事件同步等),连同它们的参数、依赖关系,在GPU驱动内部构建成一个有向无环图(Directed Acyclic Graph, DAG)。
这个过程,好比主厨不再直接对帮厨们喊话,而是花时间将一整套复杂菜肴(如“法式酥皮鹅肝鸭肉派”)的全部流程,事无巨细地绘制成一张SOP流程图,这张图,就是CUDA Graph。
# 传统模式 vs. CUDA Graph模式
# --- 传统命令式模型 (每次请求都需要CPU逐条发指令) ---
def traditional_inference(input_data):
cudaMemcpy(d_in, input_data, ...)
launch_kernel_1(d_in, d_mid, ...)
launch_kernel_2(d_mid, d_out, ...)
cudaMemcpy(result, d_out, ...)
return result
# --- CUDA Graph 声明式模型 ---
# 1. 捕获阶段 (执行一次,生成图)
stream = cudaStreamCreate()
cudaStreamBeginCapture(stream)
# ---- 把要录制的操作放入流中 ----
cudaMemcpy(...)
launch_kernel_1(...)
launch_kernel_2(...)
cudaMemcpy(...)
# --------------------------------
graph = cudaStreamEndCapture(stream)
graph_exec = cudaGraphInstantiate(graph) # 实例化可执行图
# 2. 执行阶段 (后续所有请求,CPU只需一个指令)
def graph_inference(input_data):
# (可能需要更新输入/输出数据的指针)
update_graph_params(graph_exec, input_data, result_buffer)
cudaGraphLaunch(graph_exec, stream) # CPU只需轻量级启动
cudaStreamSynchronize(stream)阶段二:实例化与执行
一旦图捕获完成,CPU的角色就发生了根本性转变。在后续的每一次推理中,CPU不再需要重复上千次的API调用,只需向GPU发出一个极其轻量的指令:“执行这张图(Launch Graph)”
GPU 驱动在接收到这个单一指令后,将接管全部的控制权。它手握完整的计算图,可以在GPU内部,以最高效、最低开销的方式,调度执行图中定义的所有操作,实现了Kernel的 Back-to-Back 执行,彻底绕过了与CPU的反复通信和操作系统的调度抖动。
这相当于厨房拿到了SOP后,帮厨们形成了“肌肉记忆”。主厨每次只需喊一声菜名(“来一份法式酥皮鹅肝鸭肉派!”),整个后厨便能心领神会,行云流水般地完成所有工序,中间无需主厨再做任何干预。
通过这种“一次捕获,多次重放”的架构,CUDA Graph将原本分散在无数次CPU-GPU交互中的控制开销,一次性地摊销在了初始的捕获阶段。在至关重要的执行阶段,实现了近乎“零”的CPU开销,将性能瓶颈重新交还给GPU的算力本身。
5. CUDA Graph在LLM推理中的应用模式
模式一:静态输入的完全图化(最理想)
这是最简单直接的应用模式。当推理请求的输入形状(如Batch Size, Sequence Length)完全固定时,从数据拷贝到计算再到结果回传的整个端到端流程,都可以被完整捕获到一个CUDA Graph中。
但是缺乏灵活性。一旦输入形状改变,整个图就需要废弃并重新捕获,这在动态性强的在线服务中是不可接受的。
模式二:“分段图化”与“动态参数”组合拳(最实用)
- 策略1——“分段图化” (Segmented Graphing)
- LLM的推理过程可清晰地划分为两个阶段:Prefill(对输入Prompt的并行处理)和Decoding(逐Token的自回归生成)。
- Prefill阶段的计算图结构与输入序列长度强相关,是动态性的主要来源。而Decoding阶段,由于每次只生成一个Token,其计算模式是固定且高度重复的。
- 因此,最佳实践是将高度重复的Decoding阶段图化,称之为“Decoding Graph”或“Step Graph”,能够优化掉推理过程中绝大部分(通常是95%以上)的CPU控制开销。
-
策略2——“图更新”与“动态参数” (Graph Update)
- CUDA提供了Graph Update机制,允许在不重新捕获整个图的情况下,修改图中某些节点(如memcpy或Kernel)的参数,例如指向输入/输出数据的内存地址指针。这在架构上实现了“结构静态,数据动态”。可以捕获一个通用的计算图,在每次执行前,通过Graph Update 将其I/O指针动态地指向当前请求的实际数据缓冲区,极大地提升了灵活性。
-
策略3——“装桶与填充” (Bucketing & Padding)
- 这是处理动态序列长度的经典工程实践。可以预先为一系列离散的、有代表性的序列长度(如64, 128, 256, 512...)分别捕获并缓存对应的CUDA Graph(目前Sglang就是这么做的)。运行时,当接收到一个请求,我们将其输入序列填充(Pad)到最接近且更大的那个“桶(Bucket)”的长度,然后直接调用该桶预先编译好的Graph。这是一种典型的空间换时间的架构权衡,通过增加内存占用换取了在动态输入下的高性能执行。
模式三:作为“顶层粘合剂”与高性能库集成
在一个设计精良的推理系统中,CUDA Graph应作为顶层调度器,其图中的节点调用的正是那些经过极致优化的计算单元。
- 封装高性能库:将对NVIDIA cuBLAS(矩阵运算)、cuDNN(卷积运算)等官方库的调用序列,封装进Graph中。
- 集成自定义核:将像FlashAttention、vLLM中PagedAttention这样的一系列高度优化的自定义CUDA Kernel调用,捕获到Graph中,实现优化的“强强联合”,消除这些自定义核之间的启动开销。
style="display: none !important;">

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 12
12 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)