双闭环转速、电流直流调速系统MATLAB仿真课程设计之旅
双闭环转速、电流直流调速系统的课程设计(MATLAB仿真) matlab/simulink搭建的双闭环直流调速系统,电气模型,采用了ASR和ACR两个PI调节器,可以再保证系统稳定的条件下实现转速无静差 可以控制直流电机的转速和电流 含说明报告
在自动化控制领域,双闭环转速、电流直流调速系统可是相当重要的存在。最近做了一个关于它的MATLAB仿真课程设计,迫不及待想和大家分享其中的乐趣与收获。
系统核心:双闭环与PI调节器
这个系统采用了ASR(转速调节器)和ACR(电流调节器)两个PI调节器。为啥要用PI调节器呢?简单来说,比例(P)环节能够快速响应输入信号的变化,而积分(I)环节则可以消除系统的稳态误差。两者结合,就能在保证系统稳定的条件下实现转速无静差,还能精准控制直流电机的转速和电流。
MATLAB/Simulink搭建电气模型
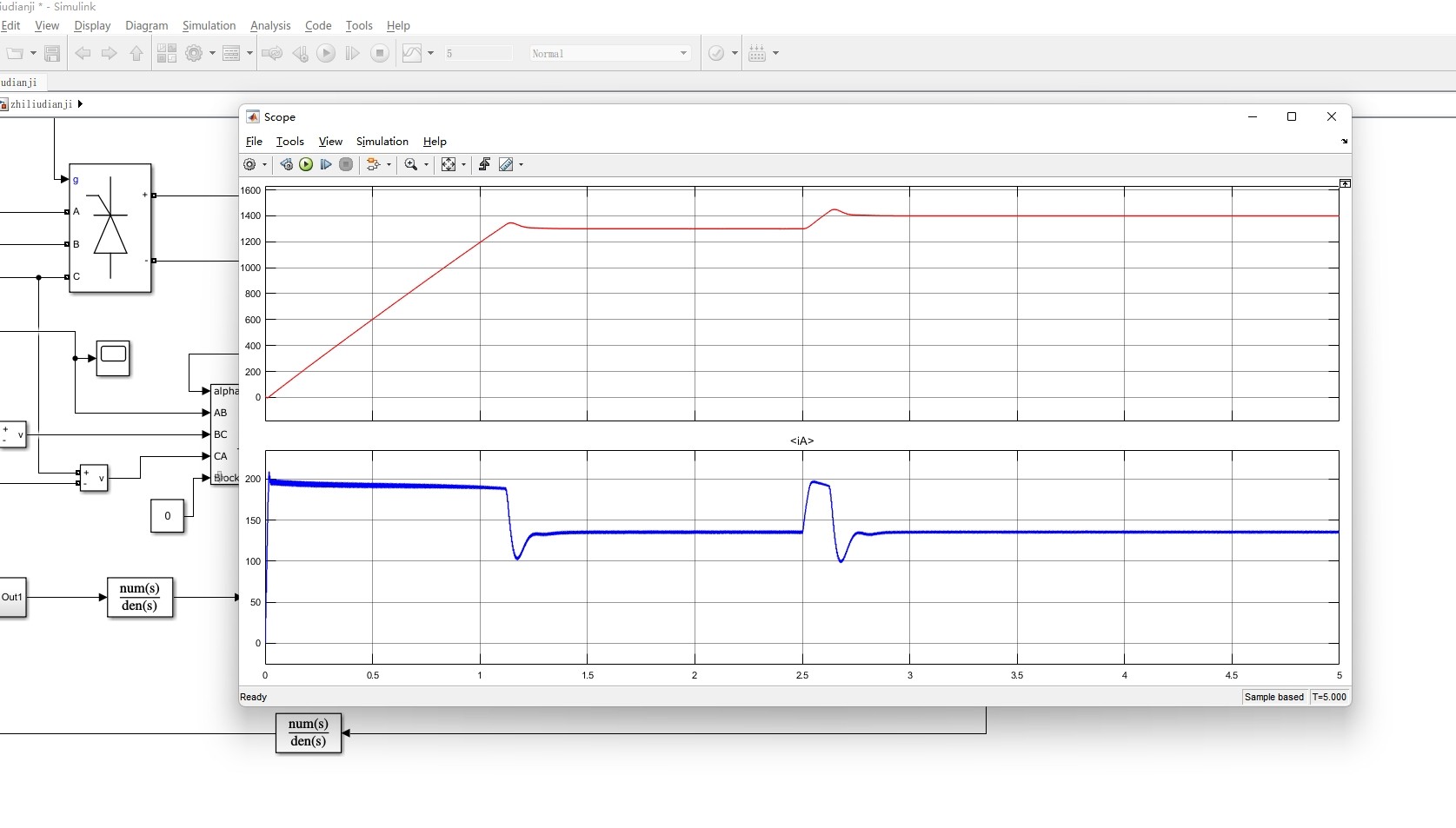
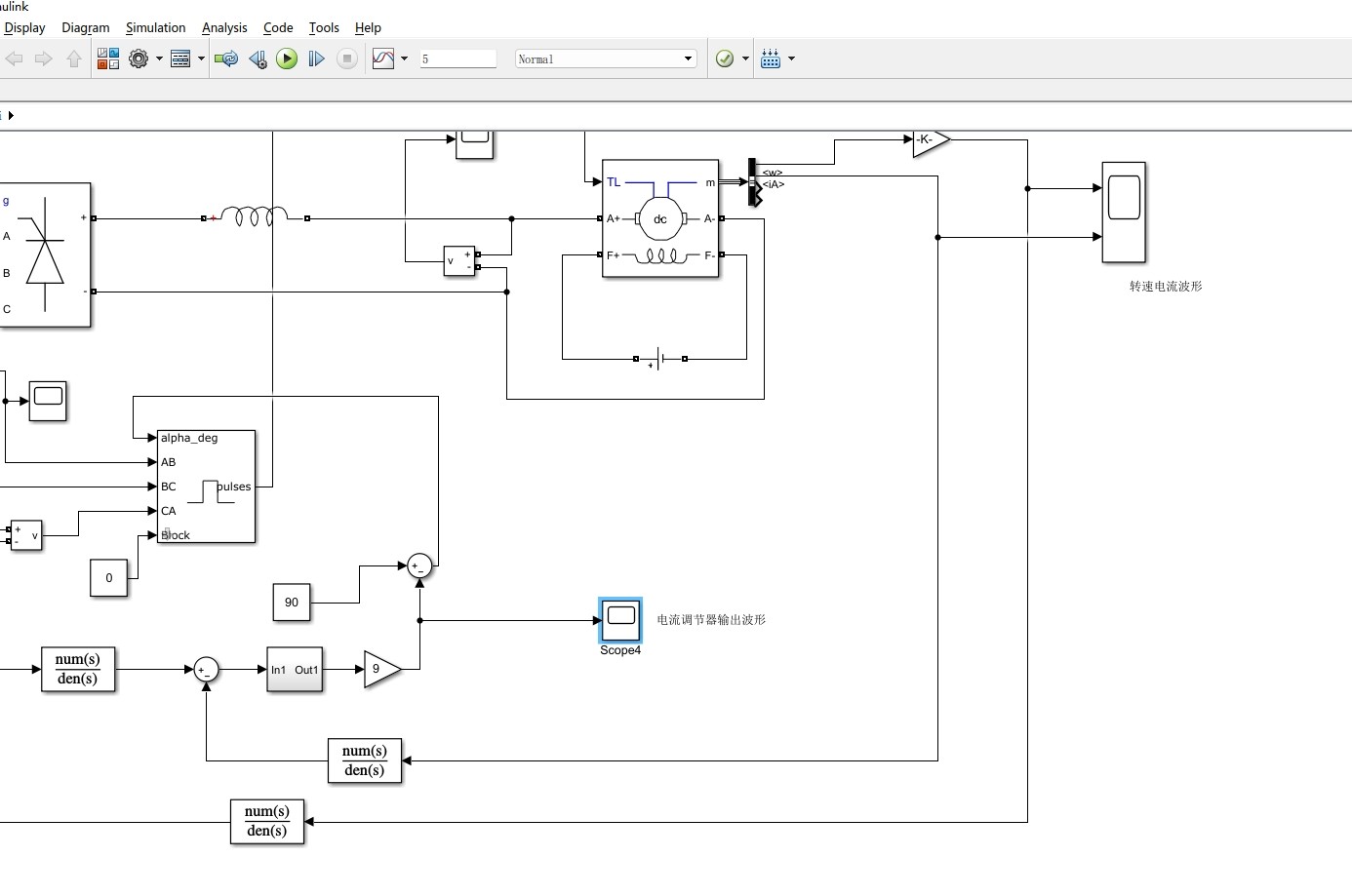
接下来看看怎么在MATLAB/Simulink里搭建这个模型。打开Simulink,就像打开了一个神奇的积木世界,我们可以把各种模块像搭积木一样搭建出我们想要的系统。
首先,添加直流电机模块。在Simulink库浏览器里搜索“DC Motor”,就能找到它。这个模块就是我们调速系统的执行机构啦,它会根据输入的控制信号旋转起来。
% 这里虽然不是搭建模型的代码,但假设我们要获取直流电机的一些参数
% 比如额定功率、额定转速等
% 假设已经定义了直流电机对象dc_motor
rated_power = dc_motor.RatedPower;
rated_speed = dc_motor.RatedSpeed;上面这段代码简单展示了如果在MATLAB脚本里获取直流电机的额定功率和额定转速参数,在实际搭建模型中虽然不会直接用到,但有助于理解电机的特性。
然后是ASR和ACR这两个PI调节器模块。在Simulink里搜索“PI Controller”,分别添加两个,一个作为ASR,一个作为ACR。ASR的输入是给定转速和实际转速的差值,输出是电流给定值;ACR的输入是电流给定值和实际电流的差值,输出则是控制直流电机的电压。
% 简单模拟PI调节器的计算过程
% 假设kp为比例系数,ki为积分系数,error为输入误差,prev_integral为上一时刻的积分值
% dt为时间步长
function output = pi_controller(kp, ki, error, prev_integral, dt)
p_term = kp * error;
integral = prev_integral + error * dt;
i_term = ki * integral;
output = p_term + i_term;
end这段代码模拟了PI调节器的基本计算逻辑,比例项加上积分项得到最终的输出。在实际Simulink模型里,PI Controller模块已经集成了这些复杂计算,但了解背后的代码逻辑能更好理解其工作原理。
双闭环转速、电流直流调速系统的课程设计(MATLAB仿真) matlab/simulink搭建的双闭环直流调速系统,电气模型,采用了ASR和ACR两个PI调节器,可以再保证系统稳定的条件下实现转速无静差 可以控制直流电机的转速和电流 含说明报告
再添加一些信号源模块用于给定转速信号,以及测量模块用于获取实际转速和电流信号,把这些模块按照双闭环调速系统的原理连接起来,一个完整的双闭环直流调速系统电气模型就搭建好啦。
系统功能实现
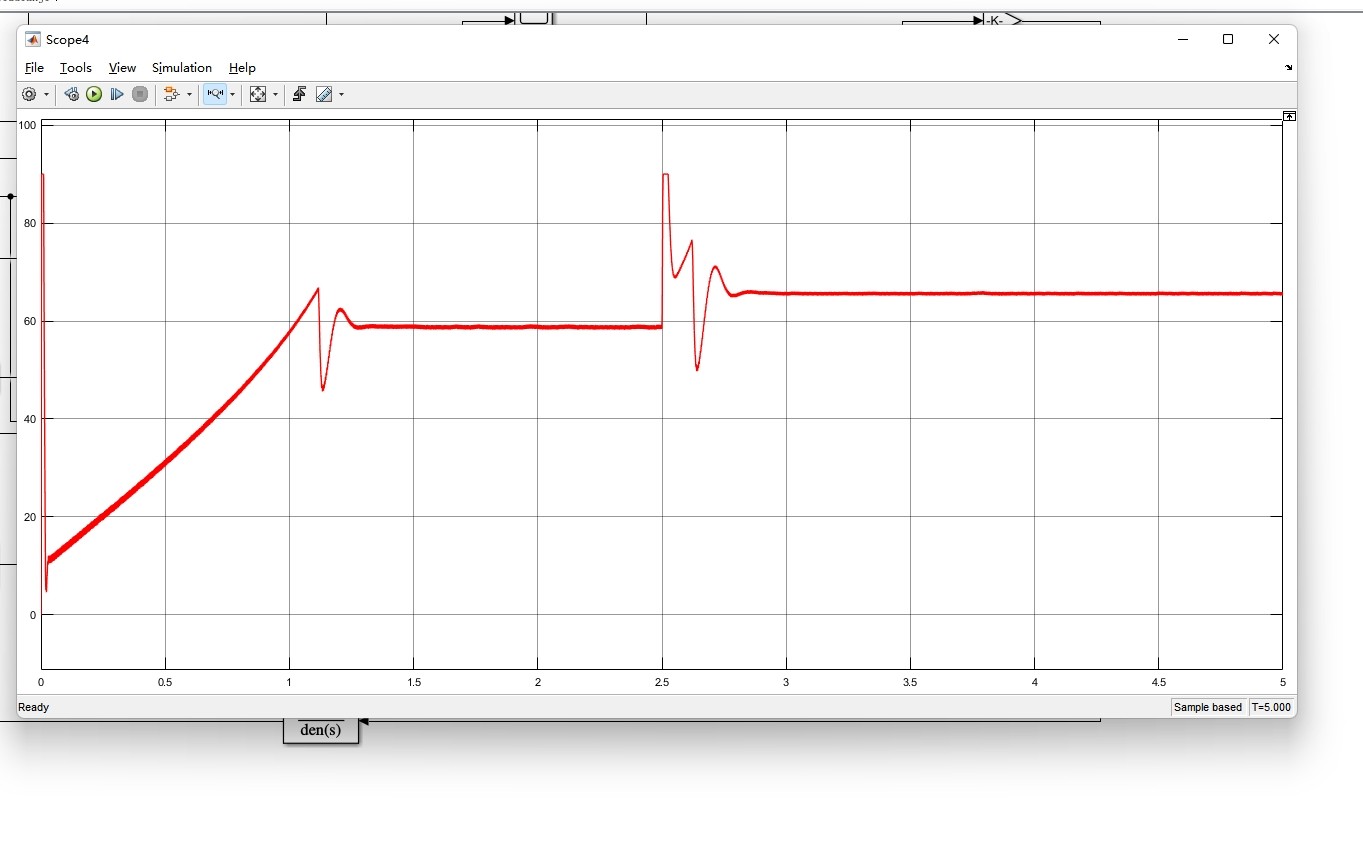
搭建好模型后,运行仿真,就能看到系统如何实现对直流电机转速和电流的控制了。当给定一个转速值,ASR开始工作,它会努力让实际转速跟上给定转速,通过不断调整输出的电流给定值。ACR则根据这个电流给定值,去调节直流电机的电压,使实际电流也能符合要求。整个过程就像一场精密的舞蹈,各个环节紧密配合。
而且这个系统厉害之处就在于,无论外界干扰如何,它都能通过双闭环控制和PI调节器的调节,最终实现转速无静差,让直流电机稳定运行在我们期望的转速上。
最后,再附上一份详细的说明报告,把系统的原理、模型搭建过程、仿真结果分析等都写清楚,这份课程设计就算大功告成啦。通过这次课程设计,对双闭环转速、电流直流调速系统有了更深刻的理解,也感受到MATLAB/Simulink在控制系统仿真中的强大魅力。希望我的分享能让大家对这个有趣的领域也产生浓厚的兴趣!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 7
7 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)