单台三相模块化多电平(MMC)小信号建模全解析
单台三相模块化多电平(mmc)小信号建模 内含功率外环、环流抑制、电流内环、PLL等控制部分完整建模 含参考文献和对应的仿真模型 动态特性如图
在电力电子领域,三相模块化多电平(MMC)变换器因其诸多优势被广泛应用。今天咱们就来深入聊聊单台三相MMC的小信号建模,其中还涵盖了功率外环、环流抑制、电流内环、PLL等控制部分的完整建模,并且会给大家分享对应的参考文献和仿真模型。
功率外环建模
功率外环主要目的是根据给定的功率指令来调整变换器的输出。通常我们会基于有功功率$P$和无功功率$Q$进行控制。以有功功率控制为例,假设给定的有功功率指令为$P_{ref}$,实际测量得到的有功功率为$P$。我们可以采用PI控制器来实现功率外环的调节。
# 简单模拟PI控制器用于功率外环
kp = 0.5
ki = 0.1
integral = 0
error = P_ref - P
integral = integral + error
output = kp * error + ki * integral上述代码中,kp和ki分别是比例系数和积分系数,通过不断计算功率指令与实际功率的误差error,并利用比例积分的方式调整输出output,这个输出会作为后续环节的输入参考量。
环流抑制建模
环流会对MMC的性能产生不利影响,因此环流抑制至关重要。环流一般包含零序环流和二倍频环流等。以抑制二倍频环流为例,我们可以通过在子模块电容电压控制中加入环流抑制项。
% MMC环流抑制相关代码片段
% 假设已经获取到子模块电容电压Vc
omega = 2 * pi * 50; % 电网角频率
t = 0:0.0001:0.1; % 时间向量
i_cir = sin(2 * omega * t); % 模拟二倍频环流
% 环流抑制控制律
k_cir = 0.1;
Vc_ref = Vc + k_cir * i_cir;在这段Matlab代码里,首先定义了电网角频率omega和时间向量t,模拟出二倍频环流icir。然后通过设置环流抑制系数kcir,对电容电压参考值Vc_ref进行调整,以此来抑制环流。
电流内环建模
电流内环主要是为了跟踪功率外环给出的电流指令,使变换器输出期望的电流。通常采用dq坐标系下的电流控制。假设在dq坐标系下的电流指令为$i{dref}$和$i{qref}$,实际测量电流为$id$和$iq$。
# dq坐标系下电流内环PI控制
kp_i = 0.8
ki_i = 0.2
integral_d = 0
integral_q = 0
error_d = i_dref - i_d
error_q = i_qref - i_q
integral_d = integral_d + error_d
integral_q = integral_q + error_q
v_d = kp_i * error_d + ki_i * integral_d
v_q = kp_i * error_q + ki_i * integral_q这里通过PI控制器对dq轴电流误差进行调节,得到dq轴的电压输出vd和vq,这些电压信号会用于调制环节来生成驱动信号。
PLL建模
锁相环(PLL)的作用是准确跟踪电网电压的相位和频率。常见的基于同步旋转坐标系的PLL结构,通过检测电网电压的相位来实现同步。
% PLL建模代码示例
% 假设已经获取到电网电压信号vabc
vabc = [sin(omega * t); sin(omega * t - 2 * pi / 3); sin(omega * t + 2 * pi / 3)];
% 坐标变换到dq坐标系
C_abc2dq = [2/3, -1/3, -1/3; 0, sqrt(3)/3, -sqrt(3)/3];
v_dq = C_abc2dq * vabc;
% PLL控制律
kp_pll = 0.01;
ki_pll = 0.001;
theta_error = atan2(v_dq(2), v_dq(1));
integral_theta = integral_theta + theta_error;
omega_est = kp_pll * theta_error + ki_pll * integral_theta;
theta = theta + omega_est * dt;上述Matlab代码首先将三相电网电压vabc通过坐标变换矩阵Cabc2dq变换到dq坐标系,得到vdq。然后根据dq轴电压计算相位误差thetaerror,利用PI控制器调整估计的角频率omegaest,进而更新相位theta,实现与电网的同步。
参考文献
[1] 《Modular Multilevel Converters: Principles, Control, and Applications》,这本书对MMC的原理、控制策略包括小信号建模都有很详细的讲解。
单台三相模块化多电平(mmc)小信号建模 内含功率外环、环流抑制、电流内环、PLL等控制部分完整建模 含参考文献和对应的仿真模型 动态特性如图
[2]相关IEEE论文“Small - Signal Modeling and Analysis of Modular Multilevel Converters for HVDC Applications”,从理论和实际应用角度深入探讨了MMC的小信号建模技术。
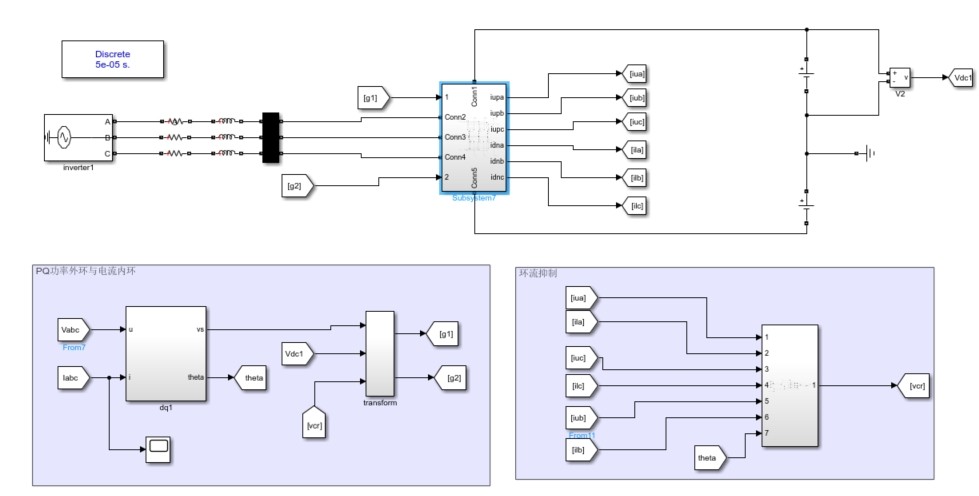
仿真模型
仿真模型可以使用MATLAB/Simulink来搭建。在Simulink中,我们可以分别构建功率外环、环流抑制、电流内环和PLL的子模块,然后按照控制逻辑连接起来。例如,功率外环输出作为电流内环的参考输入,电流内环输出用于调制产生脉冲信号驱动MMC的子模块。通过设置合适的参数,就可以模拟MMC在不同工况下的运行特性,验证我们所建立的小信号模型的正确性。
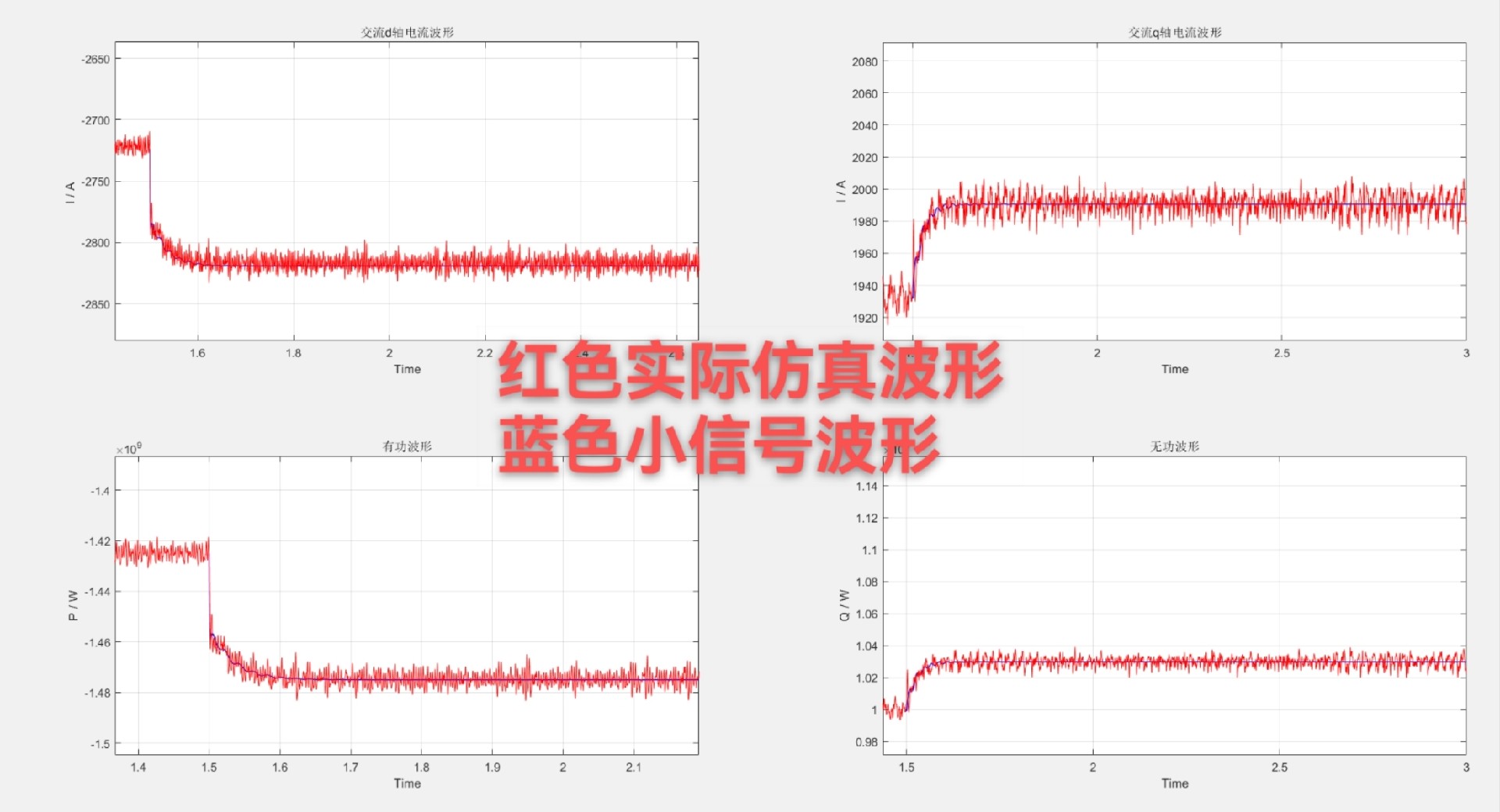
从动态特性图中可以看出,通过上述完整的建模和控制,MMC能够快速且稳定地响应功率指令变化,环流得到有效抑制,电流能够很好地跟踪指令,PLL也能准确同步电网,充分展示了这种小信号建模方法的有效性和实用性。希望大家通过这篇博文对单台三相MMC小信号建模有更深入的理解,也欢迎大家一起交流探讨。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 9
9 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)